Constraint-Aware Diffusion Priors for High-Fidelity and Versatile Quadruped Locomotion
Pith reviewed 2026-05-13 07:34 UTC · model grok-4.3
The pith
Diffusion models replace GAN discriminators to scale quadruped locomotion training to mixed datasets without mode collapse or heading drift.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Diff-CAST leverages the multi-modal distribution modeling capabilities of diffusion models for stylistic rewards, replacing traditional GAN discriminators to unlock robust data scaling on heterogeneous collections. To ensure high-fidelity intent execution and reliable real-world deployment, the framework integrates Symmetric Augmented Command Conditioning for drift-free tracking and Constrained RL for hardware safety. Experiments on a quadruped show that this setup mitigates mode collapse, enables seamless transitions between diverse skills, and produces robust, hardware-compliant locomotion.
What carries the argument
Diff-CAST (Diffusion-guided Constraint-Aware Symmetric Tracking), a framework in which diffusion models supply stylistic rewards to guide RL while SACC and constrained optimization enforce tracking fidelity and actuator safety.
If this is right
- Replaces GAN discriminators so training can scale to large heterogeneous motion collections without collapse.
- Produces seamless transitions across diverse locomotion skills within a single policy.
- Eliminates unintended heading drifts during complex maneuvers through symmetric command conditioning.
- Delivers actuator-compliant behavior that supports direct hardware deployment without major safety incidents.
Where Pith is reading between the lines
- The same diffusion-prior structure could be retrained on data from bipeds or other morphologies to extend the approach beyond quadrupeds.
- Lower dependence on curated datasets may shorten the iteration cycle for developing controllers that handle many tasks at once.
- Pairing diffusion priors with other reinforcement-learning variants could raise sample efficiency in broader locomotion and manipulation settings.
Load-bearing premise
Diffusion models trained on uncurated multi-source datasets will produce stylistic rewards that avoid out-of-distribution tracking conflicts and the full Sim2Real stack with symmetric command conditioning plus constrained RL will transfer without unintended drifts or safety violations.
What would settle it
Persistent mode collapse in sampled motion trajectories or measurable heading drift beyond safe thresholds during complex real-robot maneuvers would show the central claim fails.
Figures







read the original abstract
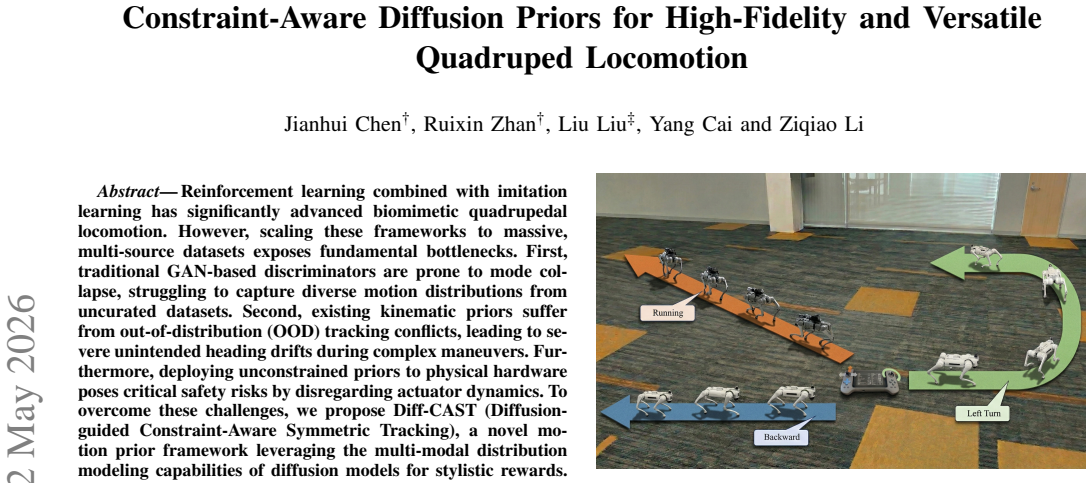
Reinforcement learning combined with imitation learning has significantly advanced biomimetic quadrupedal locomotion. However, scaling these frameworks to massive, multi-source datasets exposes fundamental bottlenecks. First, traditional GAN-based discriminators are prone to mode collapse, struggling to capture diverse motion distributions from uncurated datasets. Second, existing kinematic priors suffer from out-of-distribution (OOD) tracking conflicts, leading to severe unintended heading drifts during complex maneuvers. Furthermore, deploying unconstrained priors to physical hardware poses critical safety risks by disregarding actuator dynamics. To overcome these challenges, we propose Diff-CAST (Diffusion-guided Constraint-Aware Symmetric Tracking), a novel motion prior framework leveraging the multi-modal distribution modeling capabilities of diffusion models for stylistic rewards. Diff-CAST effectively replaces traditional GAN discriminators, unlocking robust data scaling on heterogeneous collections. To ensure high-fidelity intent execution and reliable real-world deployment, we introduce a comprehensive Sim2Real architecture integrating Symmetric Augmented Command Conditioning (SACC) for drift-free tracking, and Constrained RL for hardware safety. Experiments on a quadruped demonstrate that Diff-CAST mitigates mode collapse, enables seamless transitions between diverse skills, and ensures robust, hardware-compliant locomotion.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes Diff-CAST, a motion prior framework that replaces GAN discriminators with diffusion models to model multi-modal stylistic rewards from heterogeneous datasets, integrates Symmetric Augmented Command Conditioning (SACC) to eliminate heading drifts and OOD tracking conflicts, and employs constrained RL to enforce actuator limits for safe Sim2Real transfer. Experiments on a quadruped robot demonstrate reduced mode collapse, seamless skill transitions, and hardware-compliant locomotion without safety violations.
Significance. If the reported results hold, the work would be significant for scaling imitation learning to large uncurated multi-source datasets in legged robotics, providing a practical path to versatile, drift-free, and safe quadruped behaviors that current GAN-based and unconstrained priors cannot achieve.
minor comments (2)
- [Abstract] Abstract: The abstract states experimental success on a quadruped but omits robot model, quantitative metrics, baselines, and error bars; while the full manuscript supplies these in the experimental section, the abstract should briefly include key numbers for standalone readability.
- [Method] The diffusion reward formulation and constraint projection steps are described clearly, but the precise weighting between the diffusion prior and task reward (if any) should be stated explicitly in the method section to aid reproducibility.
Simulated Author's Rebuttal
We thank the referee for their positive assessment of our work and the recommendation for minor revision. The provided summary accurately reflects the core contributions of Diff-CAST in addressing mode collapse, drift issues, and safety constraints for quadruped locomotion via diffusion priors, SACC, and constrained RL. We appreciate the recognition of its potential significance for scaling imitation learning on heterogeneous datasets.
Circularity Check
No significant circularity in derivation chain
full rationale
The paper introduces Diff-CAST as a novel combination of diffusion-based stylistic rewards, SACC for command conditioning, and constrained RL for safety. All load-bearing steps are architectural proposals and empirical validations (ablations on mode collapse, tracking error, hardware trials) rather than equations or parameters that reduce to their own inputs by construction. No self-definitional loops, fitted inputs renamed as predictions, or load-bearing self-citations appear in the derivation; the framework is presented as an independent synthesis whose correctness is assessed externally via experiments.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Diff-CAST leverages the conditional denoising reconstruction error of diffusion models to formulate continuous stylistic rewards... rdif = D_phi(xt) in [0,1]
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Symmetric Augmented Command Conditioning (SACC) ... kinematic symmetry loss Lsym
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Spidr: A simple approach for zero-shot safety in sim-to-real transfer,
Y . As, C. Qu, B. Unger, D. Kang, M. van der Hart, L. Shi, S. Coros, A. Wierman, and A. Krause, “Spidr: A simple approach for zero-shot safety in sim-to-real transfer,”arXiv preprint arXiv:2509.18648, 2025
-
[2]
Soloparkour: Con- strained reinforcement learning for visual locomotion from privileged experience,
E. Chane-Sane, S. Bohez, R. Raileanu,et al., “Soloparkour: Con- strained reinforcement learning for visual locomotion from privileged experience,” inConference on Robot Learning (CoRL), 2024
work page 2024
-
[3]
Diffusion policy: Visuomotor policy learning via action diffusion,
C. Chi, Z. Xu, S. Feng, E. Cousineau, Y . Du, B. Burchfiel, R. Tedrake, and S. Song, “Diffusion policy: Visuomotor policy learning via action diffusion,”The International Journal of Robotics Research, vol. 44, no. 10-11, pp. 1684–1704, 2025
work page 2025
-
[4]
Adversarial motion priors make good substitutes for complex reward functions,
A. Escontrela, X. B. Peng, W. Wen, Z. Tingnan, J. Tan, and S. Levine, “Adversarial motion priors make good substitutes for complex reward functions,” in2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2022, pp. 25–32
work page 2022
-
[5]
IDQL: Implicit q-learning as an actor-critic method with diffusion policies,
P. Hansen-Estruch, I. Kostrikov, M. Janner, J. G. Kuba, and S. Levine, “IDQL: Implicit q-learning as an actor-critic method with diffusion policies,” inThe Eleventh International Conference on Learning Representations (ICLR), 2023
work page 2023
-
[6]
Uniform manifold approximation and projection,
J. Healy and L. McInnes, “Uniform manifold approximation and projection,”Nature Reviews Methods Primers, vol. 4, no. 1, p. 82, 2024
work page 2024
-
[7]
Anymal parkour: Learning agile navigation for quadrupedal robots,
D. Hoeller, N. Rudin, D. Sako, and M. Hutter, “Anymal parkour: Learning agile navigation for quadrupedal robots,”Science Robotics, vol. 9, no. 88, p. eadk1767, 2024
work page 2024
-
[8]
Bar- lowwalk: Self-supervised representation learning for legged robot terrain-adaptive locomotion,
H. Huang, S. Sun, Y . Wang, C. Li, H. Huang, and W. Xu, “Bar- lowwalk: Self-supervised representation learning for legged robot terrain-adaptive locomotion,” in2025 IEEE-RAS 24th International Conference on Humanoid Robots (Humanoids). IEEE, 2025, pp. 906–913
work page 2025
-
[9]
Learning multi-skill legged loco- motion using conditional adversarial motion priors,
N. Huang, Z. Xie, and Q. Li, “Learning multi-skill legged loco- motion using conditional adversarial motion priors,”arXiv preprint arXiv:2509.21810, 2025
-
[10]
Diffusion reward: Learning rewards via conditional video diffusion,
T. Huang, G. Jiang, Y . Ze, and H. Xu, “Diffusion reward: Learning rewards via conditional video diffusion,” inEuropean Conference on Computer Vision. Springer, 2024, pp. 478–495
work page 2024
-
[11]
X. Huang, Y . Chi, R. Wang, Z. Li, X. B. Peng, S. Shao, B. Nikolic, and K. Sreenath, “Diffuseloco: Real-time legged locomotion control with diffusion from offline datasets,” 2024. [Online]. Available: https://arxiv.org/abs/2404.19264
-
[12]
Learning agile and dynamic motor skills for legged robots,
J. Hwangbo, J. Lee, A. Dosovitskiy, D. Bellicoso, V . Tsounis, V . Koltun, and M. Hutter, “Learning agile and dynamic motor skills for legged robots,”Science robotics, vol. 4, no. 26, p. eaau5872, 2019
work page 2019
-
[13]
Planning with diffusion for flexible behavior synthesis,
M. Janner, Y . Du, J. B. Tenenbaum, and S. Levine, “Planning with diffusion for flexible behavior synthesis,” inInternational Conference on Machine Learning (ICML). PMLR, 2022, pp. 9928–9940
work page 2022
-
[14]
Out-of-distribution gen- eralization via risk extrapolation (rex),
D. Krueger, E. Caballero, J.-H. Jacobsen, A. Zhang, J. Binas, D. Zhang, R. Le Priol, and A. Courville, “Out-of-distribution gen- eralization via risk extrapolation (rex),” inInternational conference on machine learning. PMLR, 2021, pp. 5815–5826
work page 2021
-
[15]
Rma: Rapid motor adaptation for legged robots,
A. Kumar, Z. Fu, D. Pathak, and J. Malik, “Rma: Rapid motor adaptation for legged robots,” inRobotics: Science and Systems, 2021
work page 2021
-
[16]
Conservative q-learning for offline reinforcement learning,
A. Kumar, J. Fu, G. Sohhal, G. Tucker, and S. Levine, “Conservative q-learning for offline reinforcement learning,”Advances in Neural Information Processing Systems (NeurIPS), vol. 33, pp. 1179–1191, 2020
work page 2020
-
[17]
Diffusion-reward adversarial imitation learning,
C.-M. Lai, H.-C. Wang, P.-C. Hsieh, F. Wang, M.-H. Chen, and S.-H. Sun, “Diffusion-reward adversarial imitation learning,”Advances in Neural Information Processing Systems, vol. 37, pp. 95 456–95 487, 2024
work page 2024
-
[18]
Exploring constrained reinforcement learning algorithms for quadrupedal locomotion,
J. Lee, L. Schroth, V . Klemm, M. Bjelonic, A. Reske, and M. Hut- ter, “Exploring constrained reinforcement learning algorithms for quadrupedal locomotion,” in2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2024, pp. 11 132– 11 138
work page 2024
-
[19]
Learning agile skills via adversarial imitation of rough partial demonstrations,
C. Li, M. Vlastelica, S. Blaes, J. Frey, F. Grimminger, and G. Mar- tius, “Learning agile skills via adversarial imitation of rough partial demonstrations,” inConference on Robot Learning. PMLR, 2023, pp. 342–352
work page 2023
-
[20]
Walk these ways: Tuning robot control for generalization with multiplicity of behavior,
G. B. Margolis and P. Agrawal, “Walk these ways: Tuning robot control for generalization with multiplicity of behavior,”Conference on Robot Learning, 2022
work page 2022
-
[21]
Symme- try considerations for learning task symmetric robot policies,
M. Mittal, N. Rudin, V . Klemm, A. Allshire, and M. Hutter, “Symme- try considerations for learning task symmetric robot policies,” in2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 7433–7439
work page 2024
-
[22]
Coordinated humanoid robot locomotion with symmetry equivari- ant reinforcement learning policy,
B. Nie, Y . Zhang, R. Jin, Z. Cao, H. Lin, X. Yang, and Y . Gao, “Coordinated humanoid robot locomotion with symmetry equivari- ant reinforcement learning policy,”arXiv preprint arXiv:2508.01247, 2025
-
[23]
Deepmimic: Example-guided deep reinforcement learning of physics-based char- acter skills,
X. B. Peng, P. Abbeel, S. Levine, and M. Van de Panne, “Deepmimic: Example-guided deep reinforcement learning of physics-based char- acter skills,”ACM Transactions On Graphics (TOG), vol. 37, no. 4, pp. 1–14, 2018
work page 2018
-
[24]
Learning agile robotic locomotion skills by imitating animals,
X. B. Peng, E. Coumans, T. Zhang, T.-W. E. Lee, J. Tan, and S. Levine, “Learning agile robotic locomotion skills by imitating animals,” in Robotics: Science and Systems, 07 2020
work page 2020
-
[25]
Ase: Large- scale reusable adversarial skill embeddings for physically simulated characters,
X. B. Peng, Y . Guo, L. Halper, S. Levine, and S. Fidler, “Ase: Large- scale reusable adversarial skill embeddings for physically simulated characters,”ACM Transactions On Graphics (TOG), vol. 41, no. 4, pp. 1–17, 2022
work page 2022
-
[26]
Amp: Adversarial motion priors for stylized physics-based character con- trol,
X. B. Peng, Z. Ma, P. Abbeel, S. Levine, and A. Kanazawa, “Amp: Adversarial motion priors for stylized physics-based character con- trol,”ACM Transactions on Graphics (TOG), vol. 40, no. 4, pp. 1–20, 2021
work page 2021
-
[27]
Calm: Conditional adversarial latent models for directable virtual characters,
C. Tessler, Y . Kasten, Y . Guo, S. Mannor, G. Chechik, and X. B. Peng, “Calm: Conditional adversarial latent models for directable virtual characters,” inACM SIGGRAPH 2023 conference proceedings, 2023, pp. 1–9
work page 2023
-
[28]
G. Tevet, S. Raab, B. Gordon, Y . Shafir, D. Cohen-Or, and A. H. Bermano, “Human motion diffusion model,” inThe Eleventh Interna- tional Conference on Learning Representations (ICLR), 2023
work page 2023
-
[29]
J. Urain, N. Funk, J. Peters, and G. Chalvatzaki, “Se(3)-diffusionfields: Learning smooth cost functions for joint grasp and motion optimiza- tion through diffusion,”IEEE International Conference on Robotics and Automation (ICRA), 2023
work page 2023
-
[30]
Advanced skills through multiple adversarial motion priors in reinforcement learning,
E. V ollenweider, M. Bjelonic, V . Klemm, N. Rudin, J. Lee, and M. Hutter, “Advanced skills through multiple adversarial motion priors in reinforcement learning,” in2023 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2023, pp. 5120–5126
work page 2023
-
[31]
Steering Your Diffusion Policy with Latent Space Reinforcement Learning
A. Wagenmaker, M. Nakamoto, Y . Zhang, S. Park, W. Yagoub, A. Nagabandi, A. Gupta, and S. Levine, “Steering your diffusion policy with latent space reinforcement learning,”arXiv preprint arXiv:2506.15799, 2025
work page internal anchor Pith review arXiv 2025
-
[32]
Safe reinforcement learning for legged locomotion,
T.-Y . Yang, M. Rosca, J. Parker, N. Heess, N. Nosworthy, R. Hadsell, and N. Heess, “Safe reinforcement learning for legged locomotion,” in2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2022
work page 2022
-
[33]
Speech gesture generation from the trimodal context of text, audio, and speaker identity,
Y . Yoon, B. Cha, J.-H. Lee, M. Jang, J. Lee, J. Kim, and G. Lee, “Speech gesture generation from the trimodal context of text, audio, and speaker identity,”ACM Transactions on Graphics (TOG), vol. 39, no. 6, pp. 1–16, 2020
work page 2020
-
[34]
Track any motions under any disturbances
Z. Zhang, J. Guo, C. Chen, J. Wang, C. Lin, Y . Lian, H. Xue, Z. Wang, M. Liu, J. Lyu,et al., “Track any motions under any disturbances,” arXiv preprint arXiv:2509.13833, 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.