Recognition: 2 theorem links
· Lean TheoremFault-Aware MPC for Robotic Fleet Communications Scheduling
Pith reviewed 2026-05-12 01:50 UTC · model grok-4.3
The pith
A model predictive controller that tracks multiple possible fault modes recovers nearly 60 percent of lethal satellite failures by seeking information to resolve check-in ambiguities.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Interacting Multiple Model Model Predictive Control maintains a probabilistic belief over discrete fault modes that evolve with time-inhomogeneous dynamics and optimizes a two-term objective that trades off acquisition value against information gain; the resulting schedule therefore resolves some observationally aliased failure modes and intervenes on lethal faults before permanent loss.
What carries the argument
Interacting Multiple Model Model Predictive Control (IMM-MPC), a receding-horizon optimizer that propagates a mixture of mode-specific predictions and selects contact windows to maximize both mission value and reduction in fault-mode uncertainty.
If this is right
- Schedulers gain the ability to intervene on lethal faults before assets are lost, without sacrificing acquisition of healthy assets.
- Some observationally identical fault modes become separable through carefully chosen future actions, while others remain permanently aliased.
- Solve times remain comparable to simpler binary or matching methods, so the added reasoning does not prevent real-time use.
- The same framework applies to any fleet whose contact opportunities are limited and whose failures produce ambiguous observations.
Where Pith is reading between the lines
- Fleets of drones, autonomous surface vehicles, or sensor networks that share the same intermittent-link and ambiguous-failure pattern could adopt the same belief-tracking scheduler.
- The paper's characterization of resolvable versus permanently aliased modes supplies a concrete test for deciding whether to add new sensors or communication channels.
- Treating information gain as an explicit objective in the scheduler may generalize to other planning problems where actions both accomplish tasks and reduce uncertainty about hidden states.
Load-bearing premise
The possible failures are structured into discrete modes that differ in lethality, timing, and recoverability, and these differences can be captured in a probabilistic model that the scheduler can exploit.
What would settle it
In the same 200 randomized satellite-scheduling trials, the lethal-fault recovery rate under IMM-MPC falls to the level achieved by the binary-MPC baseline (approximately 9 percent).
Figures

read the original abstract
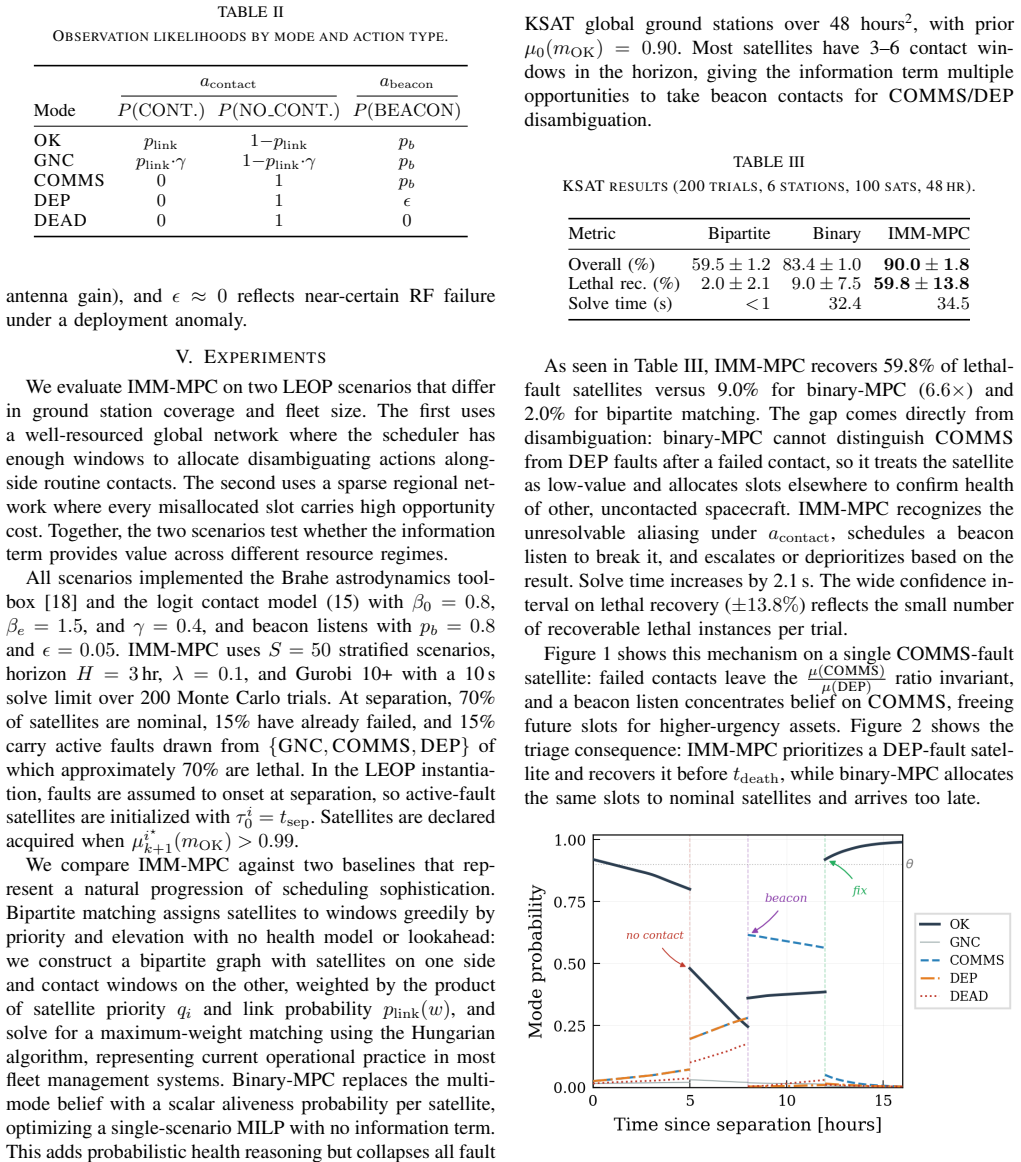
Operating a fleet of remote robotic systems with intermittent communications requires scheduling limited contact opportunities to maintain fleet health awareness, complete mission objectives, and intervene on faulted assets before their permanent loss. This scheduling problem is complicated by observational ambiguity: when an asset fails to check in, the operator cannot distinguish between a lethal hardware fault and a benign communications failure. If the system's failure modes are structured through a fault model, a scheduler can exploit mode-specific lethality, timing, and recoverability properties to prioritize correctly - but only if it can distinguish between modes that produce identical observations under standard actions. We present Interacting Multiple Model Model Predictive Control (IMM-MPC), a receding-horizon framework that maintains a probabilistic belief over discrete fault modes with time-inhomogeneous dynamics and optimizes a two-term objective coupling acquisition value with information gain. We characterize when observationally aliased fault modes can be disambiguated through scheduled actions and when aliasing is permanently unresolvable. Applied to satellite launch and early orbit communications scheduling, IMM-MPC recovers 59.8% of spacecraft experiencing lethal-faults versus 9.0% for binary-MPC and 2.0% for a bipartite graph-based formulation solved through matching. These results hold across 200 randomized trials, while maintaining identical acquisition of healthy satellites and near-identical solve times.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces Interacting Multiple Model Model Predictive Control (IMM-MPC) for scheduling limited communications opportunities in fleets of remote robotic systems (exemplified by satellite launch and early orbit operations). The approach maintains a probabilistic belief over discrete fault modes with time-inhomogeneous dynamics via IMM filtering and solves a receding-horizon optimization that couples an acquisition-value term with an information-gain term to resolve observational aliasing between lethal and benign faults. The paper claims to characterize conditions under which aliased modes are disambiguable through scheduled actions versus permanently unresolvable. In 200 randomized simulation trials, IMM-MPC recovers 59.8% of lethal-fault spacecraft versus 9.0% for binary-MPC and 2.0% for a bipartite matching formulation, while preserving identical healthy-satellite acquisition and comparable solve times.
Significance. If the fault-model assumptions and disambiguation characterization hold, the framework offers a principled extension of standard IMM and MPC techniques to handle structured uncertainty in intermittent-communication scheduling, with potentially substantial practical impact on fleet health management. The reported numerical gains are large and the computational overhead remains modest, but significance is tempered by the lack of sensitivity analysis and incomplete specification of the mode dynamics that enable the gains.
major comments (3)
- [Abstract, §4] Abstract and §4 (fault model and disambiguation characterization): the headline recovery rates (59.8% vs. 9.0%/2.0%) are obtained only under a structured fault model whose mode-specific lethality, timing, recoverability, and observation matrices are not stated with sufficient detail to verify that aliasing is resolvable in the tested regime or to reproduce the information-gain term; without these parameters the claim that IMM-MPC exploits disambiguation cannot be checked.
- [§5] §5 (simulation results): the 200-trial evaluation is confined to the resolvable-aliasing regime with no sensitivity sweep over mode-separation parameters (e.g., differences in mode-transition matrices or observation likelihoods that would render lethal and benign faults permanently aliased); under permanent aliasing the information-gain term vanishes and performance is expected to collapse to that of binary-MPC, undermining the general claim.
- [§3] §3 (IMM-MPC formulation): the objective weighting between acquisition value and information gain is treated as a free parameter, yet no systematic tuning procedure, ablation study, or robustness analysis with respect to this weighting is reported, even though the reported performance advantage depends on a non-zero information-gain contribution.
minor comments (2)
- [§2-3] Notation for the time-inhomogeneous mode-transition matrices and the action-dependent observation model should be introduced earlier and used consistently throughout the derivation of the disambiguation conditions.
- [§5] The description of the bipartite-graph baseline (solved via matching) lacks a precise statement of the objective and constraints used in the comparison, making it difficult to assess whether the 2.0% recovery figure is a fair baseline.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive review. We address each major comment below with clarifications and commitments to specific revisions that will improve reproducibility, validate the claims, and strengthen the presentation of the results.
read point-by-point responses
-
Referee: [Abstract, §4] Abstract and §4 (fault model and disambiguation characterization): the headline recovery rates (59.8% vs. 9.0%/2.0%) are obtained only under a structured fault model whose mode-specific lethality, timing, recoverability, and observation matrices are not stated with sufficient detail to verify that aliasing is resolvable in the tested regime or to reproduce the information-gain term; without these parameters the claim that IMM-MPC exploits disambiguation cannot be checked.
Authors: We agree that the specific numerical parameters of the fault model require explicit documentation for reproducibility. In the revised manuscript we will add a table and accompanying text in §4 that lists the exact mode-transition matrices, lethality probabilities, recoverability parameters, and observation likelihood matrices used for the lethal and benign fault modes. These values will directly support verification of the disambiguation conditions derived in the section and allow readers to reproduce the information-gain term in the objective. The general characterization of resolvable versus permanently unresolvable aliasing is already stated in closed form; the added parameters will simply instantiate it for the reported experiments. revision: yes
-
Referee: [§5] §5 (simulation results): the 200-trial evaluation is confined to the resolvable-aliasing regime with no sensitivity sweep over mode-separation parameters (e.g., differences in mode-transition matrices or observation likelihoods that would render lethal and benign faults permanently aliased); under permanent aliasing the information-gain term vanishes and performance is expected to collapse to that of binary-MPC, undermining the general claim.
Authors: The 200 trials were performed in the regime where aliasing remains resolvable, consistent with the conditions characterized in §4. We accept that a sensitivity analysis is needed to demonstrate the boundary. In the revision we will add results (either in §5 or an appendix) that sweep the mode-separation parameters—specifically the difference between lethal and benign transition probabilities and observation likelihoods—showing that the performance advantage of IMM-MPC shrinks monotonically and converges to binary-MPC as aliasing becomes permanent. This behavior is predicted by the information-gain term vanishing under permanent aliasing and therefore corroborates rather than undermines the general claim. revision: yes
-
Referee: [§3] §3 (IMM-MPC formulation): the objective weighting between acquisition value and information gain is treated as a free parameter, yet no systematic tuning procedure, ablation study, or robustness analysis with respect to this weighting is reported, even though the reported performance advantage depends on a non-zero information-gain contribution.
Authors: We acknowledge that the weighting parameter was introduced without accompanying analysis. In the revised manuscript we will include an ablation study (in §5 or a new appendix) that varies the weighting factor over [0,1] and reports the resulting acquisition and fault-recovery metrics. The study will show that non-zero weight on information gain is required to achieve the reported recovery rates and will provide a simple heuristic for selecting the weight according to mission priorities. We will also report performance under small perturbations of the chosen weight to demonstrate robustness. revision: yes
Circularity Check
No circularity; IMM-MPC is a standard composition and results are Monte Carlo simulation outputs
full rationale
The derivation combines the well-known IMM filter (for mode belief propagation under time-inhomogeneous Markov chains) with a receding-horizon MPC optimizer whose objective is the sum of an acquisition term and an information-gain term. Neither term is defined in terms of the other, and the 59.8 % recovery statistic is produced by running 200 independent randomized trials on a simulator whose fault-mode transition matrices and observation models are supplied as exogenous inputs. The paper's characterization of when aliasing is resolvable versus permanent is an analytical reachability argument on the mode-observation graph; it does not feed back into the numerical performance numbers. No self-citation is invoked to justify a uniqueness theorem or to close a definitional loop, and no parameter is fitted to a data subset and then re-labeled as a prediction. The method is therefore self-contained against external benchmarks (standard IMM + MPC) and the reported figures are falsifiable simulation outcomes rather than identities.
Axiom & Free-Parameter Ledger
free parameters (1)
- Objective weighting between acquisition value and information gain
axioms (2)
- domain assumption Fault modes possess distinct lethality, timing, and recoverability properties that can be encoded in a probabilistic model
- domain assumption Observationally aliased modes can be disambiguated by scheduled actions in at least some cases
invented entities (1)
-
IMM-MPC framework
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
maintains a probabilistic belief over discrete fault modes with time-inhomogeneous dynamics and optimizes a two-term objective coupling acquisition value with information gain
-
IndisputableMonolith/Foundation/AbsoluteFloorClosure.leanabsolute_floor_iff_bare_distinguishability unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
characterize when observationally aliased fault modes can be disambiguated through scheduled actions
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Integrated active fault-tolerant control using IMM approach,
Y . Zhang and J. Jiang, “Integrated active fault-tolerant control using IMM approach,”IEEE Transactions on Aerospace and Electronic Systems, vol. 37, no. 4, pp. 1221–1235, 2001
work page 2001
-
[2]
Evolution of the preliminary fault management architecture and design for the Psyche mission,
D. Marsh, J. Catchen, V . Sereno, and D. Trofimov, “Evolution of the preliminary fault management architecture and design for the Psyche mission,” inProc. IEEE Aerospace Conference, 2020
work page 2020
-
[3]
KSAT, “The noble art of LEOP-ing,” Kongsberg Satellite Services, 2017, https://www.ksat.no/news/news-archive/2017/ the-noble-art-of-leop-ing/
work page 2017
-
[4]
M. J. Kochenderfer,Decision Making Under Uncertainty: Theory and Application. MIT Press, 2015
work page 2015
-
[5]
The interacting multiple model algorithm for systems with Markovian switching coefficients,
H. A. P. Blom and Y . Bar-Shalom, “The interacting multiple model algorithm for systems with Markovian switching coefficients,”IEEE Transactions on Automatic Control, vol. 33, no. 8, pp. 780–783, 1988
work page 1988
-
[6]
Interacting multiple model methods in target tracking: A survey,
E. Mazor, A. Averbuch, Y . Bar-Shalom, and J. Dayan, “Interacting multiple model methods in target tracking: A survey,”IEEE Transac- tions on Aerospace and Electronic Systems, vol. 34, no. 1, pp. 103– 123, 1998
work page 1998
-
[7]
Explicit nonlinear MPC for fault tolerance using interacting multiple models,
E. Hill, S. A. Gadsden, and M. Biglarbegian, “Explicit nonlinear MPC for fault tolerance using interacting multiple models,”IEEE Transactions on Aerospace and Electronic Systems, vol. 57, no. 3, pp. 1590–1600, 2021
work page 2021
-
[8]
T. A. N. Heirung, T. Santos, and A. Mesbah, “Model predictive control with active learning for stochastic systems with structural model uncertainty: Online model discrimination,”Computers & Chemical Engineering, vol. 128, pp. 316–327, 2019
work page 2019
-
[9]
L. Ferranti, Y . Wan, and T. Keviczky, “Fault-tolerant reference gen- eration for model predictive control with active diagnosis of elevator jamming faults,”International Journal of Robust and Nonlinear Con- trol, vol. 29, no. 17, pp. 5935–5964, 2019
work page 2019
-
[10]
Unifying system health management and automated decision making,
E. Balaban, S. B. Johnson, and M. J. Kochenderfer, “Unifying system health management and automated decision making,”Journal of Artificial Intelligence Research, vol. 65, pp. 1–45, 2019
work page 2019
-
[11]
P. G. Morato, K. G. Papakonstantinou, C. P. Andriotis, J. S. Nielsen, and P. Rigo, “Optimal inspection and maintenance planning for dete- riorating structural components through dynamic Bayesian networks and Markov decision processes,”Structural Safety, vol. 94, p. 102140, 2022
work page 2022
-
[12]
P. Rokhforoz and O. Fink, “Distributed joint dynamic maintenance and production scheduling in manufacturing systems: Framework based on model predictive control and Benders decomposition,”Journal of Manufacturing Systems, vol. 58, pp. 519–533, 2021
work page 2021
-
[13]
Fault- tolerant model predictive control for spacecraft,
R. St ¨ockner, P. Roque, M. Charitidou, and D. V . Dimarogonas, “Fault- tolerant model predictive control for spacecraft,” inIEEE Conference on Decision and Control, 2025
work page 2025
-
[14]
A time-inhomogeneous Prendiville model with failures and repairs,
A. G. Nobile and V . Giorno, “A time-inhomogeneous Prendiville model with failures and repairs,”Mathematics, vol. 10, no. 2, p. 251, 2022
work page 2022
-
[15]
Time-dependent probabilistic approach of failure mode and effect analysis,
H. A. Jang and S. Min, “Time-dependent probabilistic approach of failure mode and effect analysis,”Applied Sciences, vol. 9, no. 22, p. 4939, 2019
work page 2019
-
[16]
The sample average approximation method for stochastic discrete optimization,
A. J. Kleywegt, A. Shapiro, and T. Homem-de Mello, “The sample average approximation method for stochastic discrete optimization,” SIAM Journal on Optimization, vol. 12, no. 2, pp. 479–502, 2002
work page 2002
-
[17]
J. R. Birge and F. Louveaux,Introduction to Stochastic Programming, 2nd ed., ser. Springer Series in Operations Research and Financial Engineering. Springer, 2011
work page 2011
-
[18]
Brahe: A modern astrodynamics library for research and engineering applications,
D. Eddy and M. J. Kochenderfer, “Brahe: A modern astrodynamics library for research and engineering applications,” arXiv:2601.06452, 2026
-
[19]
Optimal ground station selection for low-Earth orbiting satellites,
D. Eddy, M. Ho, and M. J. Kochenderfer, “Optimal ground station selection for low-Earth orbiting satellites,” inIEEE Aerospace Con- ference (AeroConf), 2025, arXiv:2410.16282
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.