Recognition: 2 theorem links
· Lean TheoremRethinking Ratio-Based Trust Regions for Policy Optimization in Multi-Agent Reinforcement Learning
Pith reviewed 2026-05-12 03:50 UTC · model grok-4.3
The pith
MARS replaces additive clipping and soft penalties with a multiplicative symmetric geometric barrier to stabilize policy updates under teammate non-stationarity.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
We introduce Multi-Agent Ratio Symmetry (MARS), a novel policy optimization objective that replaces additive ratio-based trust-region mechanisms with a multiplicatively symmetric geometric barrier. MARS preserves corrective gradients while assigning unbounded cost as probability ratios approach zero. Across 47 tasks spanning eight multi-agent environments, MARS matches or exceeds MAPPO and MASPO in aggregate environment-level performance. Ablations show that these gains arise from the geometry of the symmetric barrier rather than from flexible trust-region boundaries alone.
What carries the argument
The multiplicatively symmetric geometric barrier inside the policy objective, which enforces equal cost for ratio deviations above and below one while preserving gradient flow for recovery.
If this is right
- MARS achieves performance that matches or exceeds MAPPO and MASPO in aggregate across 47 tasks in eight environments.
- The performance advantage traces specifically to the symmetric geometry of the barrier, not merely to the presence of flexible trust-region boundaries.
- The barrier simultaneously prevents gradient removal for outliers and prevents probability collapse.
- The method integrates directly into the standard CTDE framework for cooperative multi-agent policy gradients.
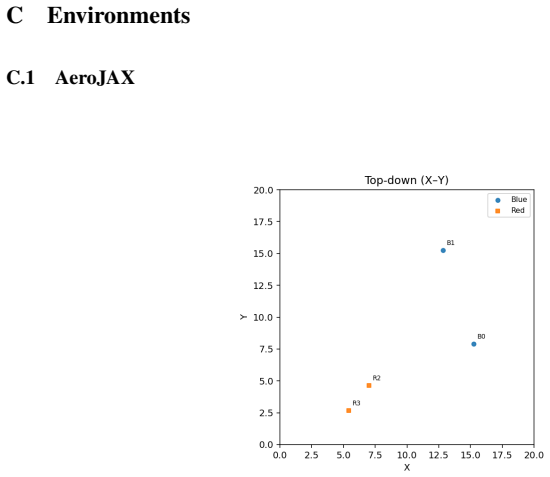
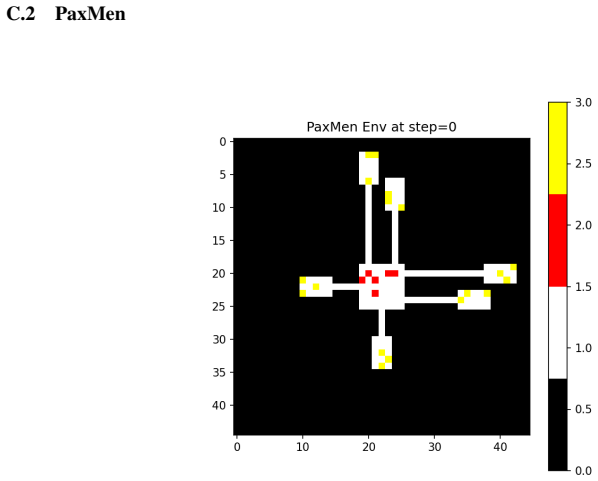
- Two new JAX-based benchmark environments, PaxMen and AeroJAX, are introduced for reproducible evaluation.
Where Pith is reading between the lines
- The same symmetric-barrier construction may reduce update variance in single-agent settings that also exhibit high advantage noise.
- Similar multiplicative symmetry could be tested in other ratio-based estimators outside reinforcement learning, such as importance sampling corrections.
- The approach raises the question of whether explicit symmetry constraints can replace heuristic clipping schedules in a wider class of policy-gradient algorithms.
- Environments with even stronger non-stationarity may expose whether the unbounded cost near zero introduces any optimization stiffness.
Load-bearing premise
The main problems in MAPPO and MASPO come from additive clipping and soft penalties reacting poorly to variance induced by teammate non-stationarity, and that a symmetric multiplicative barrier fixes this without creating comparable new instabilities or needing environment-specific tuning.
What would settle it
A new multi-agent task with strong teammate non-stationarity in which MARS produces lower aggregate returns or clear instability compared with both MAPPO and MASPO would falsify the central performance claim.
Figures





read the original abstract
Centralized training with decentralized execution (CTDE) is a standard framework for cooperative multi-agent policy-gradient reinforcement learning, allowing agents to learn from joint information while acting from local observations. Ratio-based trust-region methods such as Multi-Agent Proximal Policy Optimization (MAPPO) and Multi-Agent Simple Policy Optimization (MASPO) update decentralized actors using per-agent probability ratios weighted by joint advantage estimates. Teammate non-stationarity increases the variance of these advantages, which in turn increases the variance in the local ratio updates. This exposes two method-specific failure modes: MAPPO's additive clipping removes gradients for outlier samples and weakens recovery from policy drift, while MASPO's soft quadratic penalty can allow probability collapse. We introduce Multi-Agent Ratio Symmetry (MARS), a novel policy optimization objective that replaces these additive ratio-based trust-region mechanisms with a multiplicatively symmetric geometric barrier. MARS preserves corrective gradients while assigning unbounded cost as probability ratios approach zero. Across 47 tasks spanning eight multi-agent environments, including novel JAX benchmarks PaxMen and AeroJAX, MARS matches or exceeds MAPPO and MASPO in aggregate environment-level performance. Ablations show that these gains arise from the geometry of the symmetric barrier rather than from flexible trust-region boundaries alone.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces Multi-Agent Ratio Symmetry (MARS), a policy optimization objective for cooperative multi-agent RL under CTDE that replaces additive clipping (MAPPO) and soft quadratic penalties (MASPO) with a multiplicatively symmetric geometric barrier on per-agent probability ratios. It argues that teammate non-stationarity inflates advantage variance and triggers specific failure modes in the baselines, and claims that the new barrier preserves corrective gradients while imposing unbounded cost as ratios approach zero. Across 47 tasks in eight environments (including new JAX benchmarks PaxMen and AeroJAX), MARS is reported to match or exceed the baselines in aggregate environment-level performance, with ablations attributing the gains specifically to barrier geometry rather than flexible boundaries.
Significance. If the empirical results and ablation attribution hold under rigorous statistical scrutiny, the work would offer a targeted refinement to ratio-based trust-region methods in MARL, potentially improving stability in non-stationary cooperative settings. The geometric framing of the barrier and the release of new JAX environments constitute concrete contributions. However, the absence of quantitative metrics, error bars, per-task breakdowns, and statistical tests in the presented material limits the assessed impact.
major comments (2)
- [Abstract] Abstract: The headline claim that MARS 'matches or exceeds MAPPO and MASPO in aggregate environment-level performance' across 47 tasks is presented without any numerical metrics, error bars, statistical significance tests, or per-environment breakdowns. This directly undermines verification of the central assertion that the symmetric barrier yields geometry-driven gains.
- [Ablation studies] Ablation studies (as summarized): The manuscript states that ablations isolate gains to the geometry of the symmetric barrier rather than flexible trust-region boundaries, yet provides no details on barrier implementation, reported variance of joint advantages, or explicit confirmation that the flexible-boundary ablation uses identical optimizer settings, clipping/penalty schedules, and hyper-parameters as the MAPPO/MASPO baselines. Without these controls, the attribution to multiplicative symmetry cannot be considered load-bearing evidence.
minor comments (1)
- [Abstract] The abstract references 'novel JAX benchmarks PaxMen and AeroJAX' without characterizing their state/action spaces, non-stationarity properties, or how they extend existing multi-agent suites; this reduces reproducibility and context for the 47-task aggregate.
Simulated Author's Rebuttal
We thank the referee for their careful reading and constructive feedback. We address each major comment below and will revise the manuscript to improve the clarity and verifiability of our empirical claims and ablation studies.
read point-by-point responses
-
Referee: [Abstract] Abstract: The headline claim that MARS 'matches or exceeds MAPPO and MASPO in aggregate environment-level performance' across 47 tasks is presented without any numerical metrics, error bars, statistical significance tests, or per-environment breakdowns. This directly undermines verification of the central assertion that the symmetric barrier yields geometry-driven gains.
Authors: We agree that the abstract would benefit from quantitative support for the headline claim. The full manuscript reports detailed results with error bars (multiple seeds) and per-task breakdowns in Section 4 and the appendix, but these are not summarized numerically in the abstract itself. We will revise the abstract to include aggregate metrics such as mean normalized scores across the 47 tasks with standard errors, along with a brief note on the statistical comparisons performed. This change will make the central claim more directly verifiable while preserving the abstract's brevity. revision: yes
-
Referee: [Ablation studies] Ablation studies (as summarized): The manuscript states that ablations isolate gains to the geometry of the symmetric barrier rather than flexible trust-region boundaries, yet provides no details on barrier implementation, reported variance of joint advantages, or explicit confirmation that the flexible-boundary ablation uses identical optimizer settings, clipping/penalty schedules, and hyper-parameters as the MAPPO/MASPO baselines. Without these controls, the attribution to multiplicative symmetry cannot be considered load-bearing evidence.
Authors: We acknowledge that the ablation section lacks sufficient implementation and control details to fully substantiate the attribution. In the revision we will expand this section to: (i) provide the precise formulation and code-level implementation of the symmetric geometric barrier; (ii) report the measured variance of joint advantages under teammate non-stationarity; and (iii) explicitly confirm and document that the flexible-boundary ablation uses identical optimizer, learning-rate, clipping/penalty schedules, and all other hyper-parameters as the MAPPO/MASPO baselines. These additions will make the geometry-specific attribution load-bearing. revision: yes
Circularity Check
No circularity: MARS objective is an independent geometric design choice
full rationale
The paper introduces MARS by replacing additive clipping (MAPPO) and soft quadratic penalties (MASPO) with a multiplicatively symmetric geometric barrier, motivated directly by the stated failure modes of variance under teammate non-stationarity. No equations, self-citations, or fitted parameters are shown that reduce the new objective to prior results by construction. Ablations are described as isolating geometry from flexible boundaries, but the provided text contains no derivations that equate MARS to its inputs or to self-cited uniqueness theorems. The central claim remains an empirical design proposal evaluated on 47 tasks, with no load-bearing reduction to self-referential definitions or renamings.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Centralized training with decentralized execution allows agents to learn from joint information while acting from local observations
invented entities (1)
-
Multi-Agent Ratio Symmetry (MARS) objective with multiplicatively symmetric geometric barrier
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel; Jcost definition and barrier properties matches?
matchesMATCHES: this paper passage directly uses, restates, or depends on the cited Recognition theorem or module.
ψMARS(r) = r + 1/r − 2 ... symmetric under inversion ... unbounded barrier as r→0+ ... lim r→0+ ∂L/∂r = +∞
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction (forces J-cost) echoes?
echoesECHOES: this paper passage has the same mathematical shape or conceptual pattern as the Recognition theorem, but is not a direct formal dependency.
multiplicatively symmetric geometric barrier ... replaces additive ratio-based trust-region mechanisms
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Optuna: A next-generation hyperparameter optimization framework , author=. Proceedings of the 25th ACM SIGKDD international conference on knowledge discovery & data mining , pages=
-
[2]
Advances in Neural Information Processing Systems , volume=
Towards a standardised performance evaluation protocol for cooperative marl , author=. Advances in Neural Information Processing Systems , volume=
-
[3]
arXiv preprint arXiv:2510.11474 , year=
Coordinated Strategies in Realistic Air Combat by Hierarchical Multi-Agent Reinforcement Learning , author=. arXiv preprint arXiv:2510.11474 , year=
-
[4]
Advances in Neural Information Processing Systems , volume=
Smacv2: An improved benchmark for cooperative multi-agent reinforcement learning , author=. Advances in Neural Information Processing Systems , volume=
-
[5]
arXiv preprint arXiv:2401.12455 , year=
Multi-agent deep reinforcement learning with centralized training and decentralized execution for transportation infrastructure management , author=. arXiv preprint arXiv:2401.12455 , year=
-
[6]
2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , pages=
Language-guided pattern formation for swarm robotics with multi-agent reinforcement learning , author=. 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , pages=. 2024 , organization=
work page 2024
-
[7]
Advances in neural information processing systems , volume=
Deep reinforcement learning at the edge of the statistical precipice , author=. Advances in neural information processing systems , volume=
-
[8]
Advances in Neural Information Processing Systems , volume=
Celebrating diversity in shared multi-agent reinforcement learning , author=. Advances in Neural Information Processing Systems , volume=
-
[9]
Advances in Neural Information Processing Systems , volume=
Gigastep-one billion steps per second multi-agent reinforcement learning , author=. Advances in Neural Information Processing Systems , volume=
-
[10]
Advances in Neural Information Processing Systems , volume=
Jaxmarl: Multi-agent rl environments and algorithms in jax , author=. Advances in Neural Information Processing Systems , volume=
-
[11]
Jumanji: a Diverse Suite of Scalable Reinforcement Learning Environments in
Bonnet, Cl. Jumanji: a Diverse Suite of Scalable Reinforcement Learning Environments in. Proceedings of the International Conference on Learning Representations (ICLR) , year =
-
[12]
Benchmarking multi-agent deep reinforcement learning algorithms in cooperative tasks , author=. arXiv preprint arXiv:2006.07869 , year=
-
[13]
Advances in neural information processing systems , volume=
Multi-agent actor-critic for mixed cooperative-competitive environments , author=. Advances in neural information processing systems , volume=
-
[14]
Advances in Neural Information Processing Systems , volume=
No regrets: Investigating and improving regret approximations for curriculum discovery , author=. Advances in Neural Information Processing Systems , volume=
-
[15]
Mava: a research library for distributed multi-agent reinforcement learning in JAX , author=. arXiv preprint arXiv:2107.01460 , year=
-
[16]
International conference on machine learning , pages=
Benchmarking deep reinforcement learning for continuous control , author=. International conference on machine learning , pages=. 2016 , organization=
work page 2016
-
[17]
Proceedings of the nineteenth international conference on machine learning , pages=
Approximately optimal approximate reinforcement learning , author=. Proceedings of the nineteenth international conference on machine learning , pages=
-
[18]
International Conference on Learning Representations , year=
Trust Region Policy Optimisation in Multi-Agent Reinforcement Learning , author=. International Conference on Learning Representations , year=
-
[19]
International conference on learning representations , year=
What matters for on-policy deep actor-critic methods? a large-scale study , author=. International conference on learning representations , year=
-
[20]
International conference on machine learning , pages=
Trust region policy optimization , author=. International conference on machine learning , pages=. 2015 , organization=
work page 2015
-
[21]
Journal of Machine Learning Research , volume=
On the theory of policy gradient methods: Optimality, approximation, and distribution shift , author=. Journal of Machine Learning Research , volume=
-
[22]
Journal of Artificial Intelligence Research , volume=
On centralized critics in multi-agent reinforcement learning , author=. Journal of Artificial Intelligence Research , volume=
-
[23]
Proceedings of the AAAI conference on artificial intelligence , volume=
Counterfactual multi-agent policy gradients , author=. Proceedings of the AAAI conference on artificial intelligence , volume=
-
[24]
A concise introduction to decentralized POMDPs , author=. 2016 , publisher=
work page 2016
-
[25]
Forty-second International Conference on Machine Learning , year=
Simple Policy Optimization , author=. Forty-second International Conference on Machine Learning , year=
-
[26]
Advances in neural information processing systems , volume=
The surprising effectiveness of ppo in cooperative multi-agent games , author=. Advances in neural information processing systems , volume=
-
[27]
Proximal Policy Optimization Algorithms
Proximal policy optimization algorithms , author=. arXiv preprint arXiv:1707.06347 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[28]
Uncertainty in artificial intelligence , pages=
Truly proximal policy optimization , author=. Uncertainty in artificial intelligence , pages=. 2020 , organization=
work page 2020
-
[29]
International conference on learning representations , year=
Implementation matters in deep rl: A case study on ppo and trpo , author=. International conference on learning representations , year=
-
[30]
Advances in neural information processing systems , volume=
A natural policy gradient , author=. Advances in neural information processing systems , volume=
-
[31]
Is independent learning all you need in the starcraft multi-agent challenge? , author=. arXiv preprint arXiv:2011.09533 , year=
-
[32]
Sable: a Performant, Efficient and Scalable Sequence Model for
Omayma Mahjoub and Sasha Abramowitz and Ruan John de Kock and Wiem Khlifi and Simon Verster Du Toit and Jemma Daniel and Louay Ben Nessir and Louise Beyers and Juan Claude Formanek and Liam Clark and Arnu Pretorius , booktitle=. Sable: a Performant, Efficient and Scalable Sequence Model for
-
[33]
Proceedings of the 36th Annual ACM Symposium on Applied Computing , year =
Jiang, Shuo and Amato, Christopher , title =. Proceedings of the 36th Annual ACM Symposium on Applied Computing , year =
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.