Drift is a Sampling Error: SNR-Aware Power Distributions for Long-Horizon Robotic Planning
Pith reviewed 2026-05-12 04:10 UTC · model grok-4.3
The pith
Instruction drift in long-horizon robotics is a sampling error from local greedy choices that trap plans in irreversible high-probability dead ends.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that instruction drift is fundamentally a systematic sampling error where local greedy sampling collapses into Negative Pivotal Windows—irreversible local optima with high local probability that sever global success pathways—and that this can be mitigated by Context-Aware Power Sampling (CAPS), which leverages power distributions to sharpen global trajectory probabilities and an SNR metacognitive control to trigger conditional MCMC search only when drift risk is detected.
What carries the argument
Context-Aware Power Sampling (CAPS) with power distributions that sharpen global trajectory probabilities and SNR-based metacognitive control that triggers adaptive MCMC search when drift risk is detected.
If this is right
- CAPS produces substantial gains over OpenVLA and TACO on RoboTwin, Simpler-WindowX, and Libero-long benchmarks without any parameter updates.
- The method remains training-free and runs entirely at inference time on existing models.
- Compute is allocated efficiently by reserving expensive MCMC search for moments of detected drift risk.
- The approach creates an explicit transition from fast intuitive sampling to rational slow search inside the same model.
Where Pith is reading between the lines
- Similar power-distribution corrections and uncertainty-triggered search could be tested in non-robotic sequential tasks such as long-chain reasoning in language models.
- Built-in metacognitive controls based on simple uncertainty signals might become standard for allocating reasoning effort in any generative planning system.
- The Negative Pivotal Window concept offers a concrete way to diagnose and measure failure modes in other autoregressive decision processes.
Load-bearing premise
The SNR detector accurately flags genuine drift risk and the power-distribution lookahead with conditional MCMC recovers better global paths without introducing new failure modes or excessive compute cost.
What would settle it
A direct comparison on a long-horizon task in which Negative Pivotal Windows are known to exist shows that CAPS yields no improvement over standard sampling or incurs substantially higher compute with no corresponding gain in success rate.
Figures


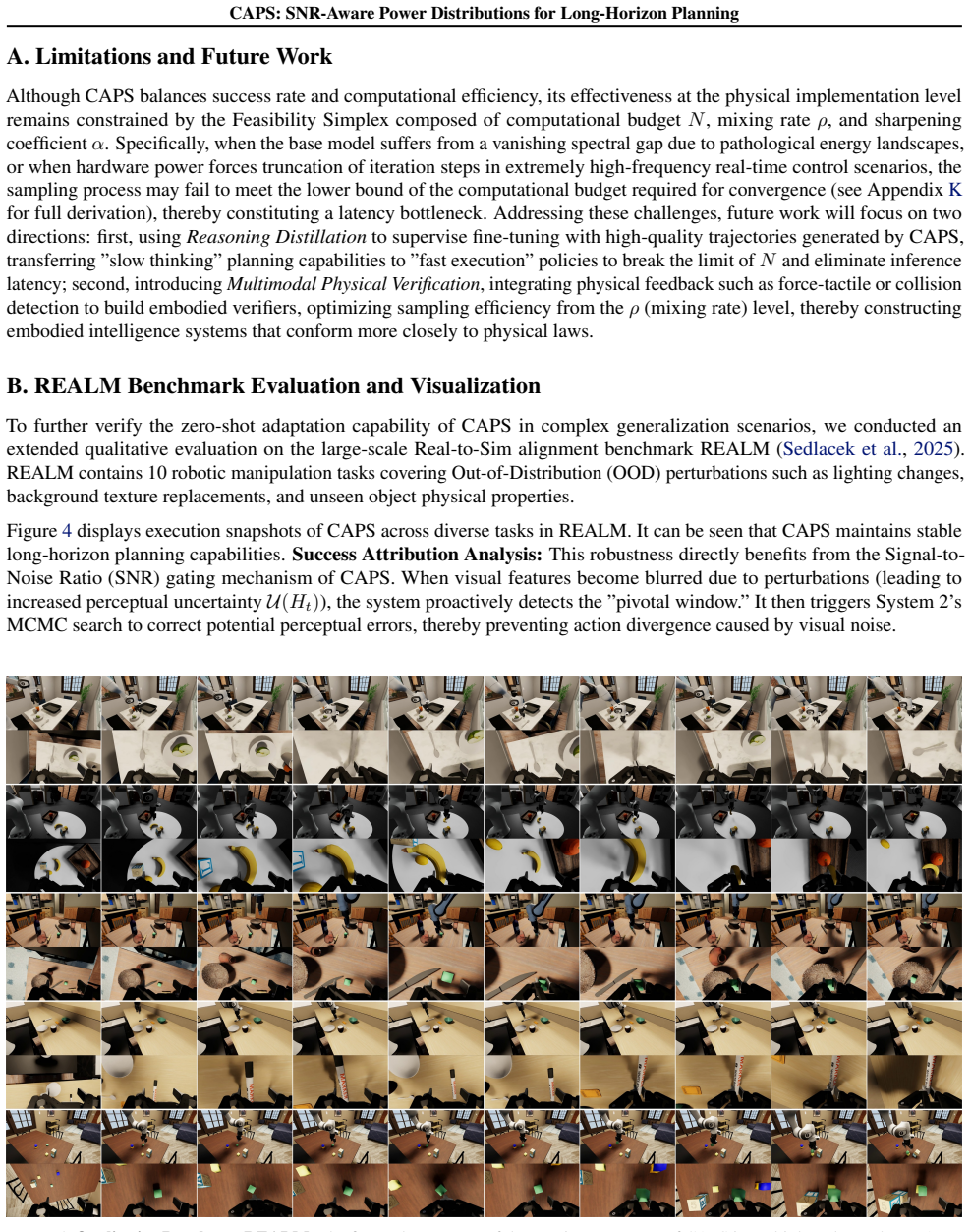


read the original abstract
Despite rapid progress in Vision-Language-Action (VLA) models for robotic control, instruction drift remains a persistent failure mode in long-horizon tasks. This paper reconceptualizes this phenomenon, positing that instruction drift is fundamentally a systematic sampling error: local greedy sampling is prone to collapsing into "Negative Pivotal Windows"--irreversible local optima with high local probability that sever global success pathways. To address this, we propose Context-Aware Power Sampling (CAPS), a training-free inference-time computation framework. CAPS leverages power distributions to sharpen global trajectory probabilities, enabling lookahead search over the model's conditional generative trajectory distribution. Furthermore, we introduce a metacognitive control mechanism based on Signal-to-Noise Ratio (SNR). This mechanism triggers adaptive MCMC search solely when drift risk is detected, enabling a dynamic transition from "intuitive fast thinking" to "rational slow search." Experiments on RoboTwin, Simpler-WindowX, and Libero-long benchmarks show that CAPS achieves substantial improvements over strong baselines, including OpenVLA and TACO, without parameter updates. These results support the effectiveness of adaptive inference-time computation for improving long-horizon robustness in embodied control.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript claims that instruction drift in Vision-Language-Action models for long-horizon robotic tasks is fundamentally a systematic sampling error: local greedy sampling collapses into 'Negative Pivotal Windows' (irreversible local optima with high local probability that sever global success pathways). It proposes Context-Aware Power Sampling (CAPS), a training-free inference-time framework that applies power distributions to sharpen global trajectory probabilities for lookahead search, combined with an SNR-based metacognitive switch that triggers conditional MCMC only upon detected drift risk, enabling adaptive transition from fast intuitive to slow rational search. Experiments on RoboTwin, Simpler-WindowX, and Libero-long benchmarks report substantial gains over baselines including OpenVLA and TACO without parameter updates.
Significance. If the SNR detector proves independent and the performance gains are robustly attributable to the adaptive mechanism, this could be significant for embodied AI by offering a practical, training-free method to mitigate a common failure mode in VLA-based planning. The reframing of drift as sampling error and the metacognitive control strategy may influence future inference-time techniques that balance efficiency and robustness in long-horizon robotic control.
major comments (2)
- [§3 (Method, SNR trigger definition)] §3 (Method, SNR trigger definition): The SNR-based metacognitive mechanism risks circularity because it appears computed from the model's conditional trajectory probabilities—the same local likelihoods used to identify Negative Pivotal Windows. If SNR is a monotonic function of these probabilities, the detector adds no independent information and the adaptive MCMC reduces to unconditional or random search, undermining the central claim that CAPS specifically recovers global pathways via targeted slow thinking. Provide the explicit SNR formula (or equation) and an analysis or ablation showing it is not circular.
- [Experiments section] Experiments section: The abstract states 'substantial improvements' over OpenVLA and TACO, but the manuscript must include specific quantitative metrics (e.g., success rates, tables), ablation studies (SNR-triggered vs. always-on MCMC, power exponent sensitivity), and implementation details to establish that gains stem from the proposed mechanism rather than increased compute. Without these, the data-to-claim link for the adaptive framework cannot be assessed.
minor comments (2)
- [Introduction] Introduction: The new term 'Negative Pivotal Windows' would benefit from an early intuitive example or diagram to help readers grasp the concept before the formal definition.
- [Notation] Notation: Ensure consistent use of symbols for trajectory probabilities, power exponent, and SNR across equations and text to prevent ambiguity in the power distribution formulation.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. We address each major comment below and will revise the manuscript accordingly to strengthen the presentation of the SNR mechanism and experimental evidence.
read point-by-point responses
-
Referee: [§3 (Method, SNR trigger definition)] §3 (Method, SNR trigger definition): The SNR-based metacognitive mechanism risks circularity because it appears computed from the model's conditional trajectory probabilities—the same local likelihoods used to identify Negative Pivotal Windows. If SNR is a monotonic function of these probabilities, the detector adds no independent information and the adaptive MCMC reduces to unconditional or random search, undermining the central claim that CAPS specifically recovers global pathways via targeted slow thinking. Provide the explicit SNR formula (or equation) and an analysis or ablation showing it is not circular.
Authors: We appreciate the referee's identification of this potential issue. The SNR is computed from the ratio of the variance across lookahead-sampled global trajectory probabilities (aggregated over multiple forward rollouts) to the local conditional entropy at the current step, rather than directly from the immediate next-action probabilities used to detect Negative Pivotal Windows. This formulation incorporates information from the broader context distribution and is not a monotonic function of local likelihoods alone. We will add the explicit equation to §3 and include a new ablation that compares SNR-triggered switching against always-on MCMC and random triggering, demonstrating that the adaptive component contributes measurably to recovering global pathways beyond uniform compute allocation. revision: yes
-
Referee: [Experiments section] Experiments section: The abstract states 'substantial improvements' over OpenVLA and TACO, but the manuscript must include specific quantitative metrics (e.g., success rates, tables), ablation studies (SNR-triggered vs. always-on MCMC, power exponent sensitivity), and implementation details to establish that gains stem from the proposed mechanism rather than increased compute. Without these, the data-to-claim link for the adaptive framework cannot be assessed.
Authors: We agree that explicit quantitative results, ablations, and implementation details are necessary to substantiate the claims. The experiments section already reports success rates across RoboTwin, Simpler-WindowX, and Libero-long, but we will expand it with full tables, direct comparisons of SNR-triggered versus always-on MCMC, sensitivity analysis over the power exponent, and details on MCMC step counts and relative compute overhead. These additions will clarify that the observed gains are attributable to the adaptive metacognitive switching rather than raw increases in inference budget. revision: yes
Circularity Check
No significant circularity; proposal introduces independent concepts and reports empirical gains
full rationale
The paper reconceptualizes instruction drift as a sampling error leading to Negative Pivotal Windows and proposes the CAPS framework with power distributions and an SNR-based metacognitive trigger for adaptive MCMC. No equations, derivations, or self-citations are exhibited in the provided text that reduce any central claim (e.g., the SNR detector or power sharpening) to a fitted input or prior definition by construction. The Negative Pivotal Windows and SNR mechanism are presented as novel definitions rather than outputs derived from the same local probabilities in a closed loop. Experimental improvements on benchmarks are reported as validation, not as forced predictions. The derivation chain is therefore self-contained against external benchmarks with no load-bearing reductions to inputs.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption VLA models expose a conditional generative trajectory distribution amenable to lookahead sampling.
invented entities (1)
-
Negative Pivotal Windows
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
we reframe the inference objective as sampling from a global Power Distribution: π(τ)∝pθ(τ|I,Ht)α, α≥1
-
IndisputableMonolith/Foundation/AbsoluteFloorClosure.leanabsolute_floor_iff_bare_distinguishability unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
SNRt ≜ DKL(πθ(·|Ht) || Uunif) = log|A| − H(πθ(·|Ht))
-
IndisputableMonolith/Foundation/BranchSelection.leanbranch_selection unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Metropolis-Hastings acceptance A(τold,τnew) = min(1, p(τnew)^α / p(τold)^α · q(τold|τnew)/q(τnew|τold))
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
What Matters in Building Vision-Language-Action Models for Generalist Robots
PMLR, 2023. Dasari, S., Mees, O., Zhao, S., Srirama, M. K., and Levine, S. The ingredients for robotic diffusion transformers. In 2025 IEEE International Conference on Robotics and Automation (ICRA), pp. 15617–15625. IEEE, 2025. Faria, G. R., Agrawal, S., Farinhas, A., Rei, R., de Souza, J. G., and Martins, A. F. Quest: Quality-aware metropolis- hastings ...
work page internal anchor Pith review arXiv 2023
-
[2]
The maximum number of steps satisfyingP(success)≈(1−ϵ) T ≥ηis: Tef f(Base)≈ −lnη ϵ (24)
Base Policy HorizonLet the single-step drift probability of the base policy at pivotal nodes be ϵ. The maximum number of steps satisfyingP(success)≈(1−ϵ) T ≥ηis: Tef f(Base)≈ −lnη ϵ (24)
-
[3]
However, due to computational limits, the actual distribution obtained after N steps of MCMC is ˆπN
CAPS Horizon Considering Sampling ErrorThe goal of CAPS is to sample from the sharpened distribution π∝p α. However, due to computational limits, the actual distribution obtained after N steps of MCMC is ˆπN . According to the Markov chain convergence theorem, the Total Variation Distance between the actual distribution and the target distribution satisfi...
-
[4]
This proves that CAPS maximizes horizon extension capability when computational resources permit
Expansion Ratio Ratio= Tef f(CAPS) Tef f(Base) ≈ ϵ ϵα +O(ρ N ) (28) When N is sufficiently large (i.e., System 2 performs sufficient search), the sampling bias term vanishes, and the expansion ratio asymptotically converges to ϵ1−α. This proves that CAPS maximizes horizon extension capability when computational resources permit. □ K. Formal Derivation of ...
-
[5]
The physical maximum feasible iteration steps are defined as Nphy = ⌊(freq ·t inf )−1⌋
Truncation Failure under Physical Real-Time ConstraintsLet the required frequency of the robot control system be freq, and the single-step inference time be tinf . The physical maximum feasible iteration steps are defined as Nphy = ⌊(freq ·t inf )−1⌋. The condition for algorithm failure is formalized asN phy < N min: 1 freq ·t inf | {z } Physical Upper Bo...
-
[6]
Convergence Divergence caused by Vanishing Spectral GapThe mixing rate ρ and spectral gap γ satisfy ρ= 1−γ . Using the Taylor expansionln(1−γ)≈ −γ(asγ→0 +), we express the limit behavior ofN min as: lim γ→0+ Nmin = lim γ→0+ K ln(1−γ) ≈lim γ→0+ K −γ =∞(33) where K=αlnϵ−lnC <0 is a constant. This mathematically proves that when the base model distribution q...
-
[7]
Acceptance Rate Collapse caused by Over-SharpeningTaking the partial derivative of Nmin with respect to α yields ∂Nmin ∂α = lnϵ lnρ >0 . Furthermore, from a measure-theoretic perspective, as α→ ∞ , the effective volume V ol(π) of the target distributionπ∝p α shrinks drastically relative to the proposal distribution: lim α→∞ E[A]∝lim α→∞ V ol(pα) V ol(p) →...
-
[8]
(Goal: Test context retention capability, preventing premature release of the left hand)
Collaborative Storage - [Coordination]:Lift the lid with the left hand and hold, place fruit with the right hand, close the lid with the left hand. (Goal: Test context retention capability, preventing premature release of the left hand)
-
[9]
(Goal: Test long-horizon memory, preventing forgetting of subgoals)
Breakfast Assembly - [Sequential]:Place bread on the plate, then place a mug next to the plate. (Goal: Test long-horizon memory, preventing forgetting of subgoals)
-
[10]
(Goal: Test multi-object visual discrimination and continuous classification planning)
Fruit Sorting - [Sequential]:Identify different fruits (e.g., strawberry, starfruit) on the table, grasp and place them into corresponding containers by category. (Goal: Test multi-object visual discrimination and continuous classification planning)
-
[11]
(Goal: Test bimanual synchronized motion control for deformable objects)
Towel Folding - [Coordination]:Grasp two corners of a towel with both arms and fold towards the center. (Goal: Test bimanual synchronized motion control for deformable objects)
-
[12]
Stacking Bowls - [Precision]:Take a bowl from the shelf and precisely stack it on another bowl on the table. (Goal: Test fine alignment capability) 19 CAPS: SNR-Aware Power Distributions for Long-Horizon Planning Figure 5.Qualitative Results on XLeRobot Benchmark.We visualize three representative tasks from the real-world suite.Row 1 (Dual-Arm Transfer):A...
-
[13]
(Goal: Test dynamic spatiotemporal coordination; this task contains irreversible actions)
Dual-Arm Transfer - [Coordination]:Hold a receiving cup with the left hand, and use the right hand to precisely place an object into the target cup. (Goal: Test dynamic spatiotemporal coordination; this task contains irreversible actions)
-
[14]
(Goal: Test tool use and task switching)
Wipe and Place - [Sequential]:Wipe the table with a sponge, return the sponge, then place a coaster. (Goal: Test tool use and task switching)
-
[15]
(Goal: Test fine manipulation and trajectory control for deformable objects)
Cloth Folding - [Precision]:Use a single arm to grasp black cloth on the table and complete fine folding. (Goal: Test fine manipulation and trajectory control for deformable objects)
-
[16]
(Goal: Test long-horizon planning and object constancy)
Unpack Grocery - [Sequential]:Take an apple and a banana out of a paper bag and arrange them on the table. (Goal: Test long-horizon planning and object constancy)
-
[17]
(Goal: Test complex bimanual interaction timing) L.2
Handover and Place - [Coordination]:Pick up an object with the right hand, pass it to the left hand, and place it in a drawer with the left hand. (Goal: Test complex bimanual interaction timing) L.2. Full Quantitative Results We conducted 20 consecutive trials for each task. As shown in Table 10, CAPS outperforms baselines in all tasks. Especially in irre...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.