Recognition: 2 theorem links
· Lean TheoremOn Uniform Error Bounds for Kernel Regression under Non-Gaussian Noise
Pith reviewed 2026-05-12 02:22 UTC · model grok-4.3
The pith
Kernel regression now has uniform error bounds for non-Gaussian and correlated noise
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that novel non-asymptotic probabilistic uniform error bounds can be established for kernel-based regression estimators under a broad class of non-Gaussian noise distributions, including sub-Gaussian, bounded, sub-exponential, and variance or moment-bounded noise, and that these bounds continue to hold when the noise is correlated or uncorrelated. The bounds are shown to be tighter than prior results by direct comparison of the induced uncertainty regions and by their use in a safe control application.
What carries the argument
Novel non-asymptotic probabilistic uniform error bounds obtained via concentration arguments adapted to generalized noise classes in the kernel regression setting.
If this is right
- Uncertainty quantification for kernel regression estimates becomes possible under realistic non-Gaussian and dependent noise without asymptotic approximations.
- The induced uncertainty regions are smaller than those produced by bounds limited to independent sub-Gaussian noise.
- Safe control applications can enforce constraints with reduced conservatism when using these bounds.
- Finite-sample guarantees apply directly to both correlated and uncorrelated observation noise.
Where Pith is reading between the lines
- The same concentration techniques may transfer to other nonparametric estimators if analogous tail conditions on the noise can be verified.
- In practice the tighter bounds could relax safety margins in learning-based controllers operating with heavy-tailed sensor noise.
- The explicit comparison on safe control performance indicates that bound tightness translates into measurable improvements in closed-loop behavior.
Load-bearing premise
The noise process must belong to one of the listed classes such as sub-Gaussian or moment-bounded, and the kernel regression problem must satisfy the regularity conditions required for the uniform concentration arguments.
What would settle it
A controlled simulation with sub-exponential or moment-bounded noise in which the observed supremum deviation of the kernel regressor from the true function exceeds the derived bound with probability larger than the claimed value.
Figures









read the original abstract
Providing non-conservative uncertainty quantification for function estimates derived from noisy observations remains a fundamental challenge in statistical machine learning, particularly for applications in safety-critical domains. In this work, we propose novel non-asymptotic probabilistic uniform error bounds for kernel-based regression. Compared to related bounds in the literature that are restricted to (conditionally) independent sub-Gaussian noise, our bounds allow to consider a broad class of non-Gaussian distributions, such as sub-Gaussian, bounded, sub-exponential, and variance/moment-bounded noise. Moreover, our results apply to correlated and uncorrelated noise. We compare our proposed error bounds with existing results in terms of the induced uncertainty region and their performance in safe control, demonstrating the tightness of the proposed bounds.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript claims to derive novel non-asymptotic probabilistic uniform error bounds for kernel-based regression. These bounds extend beyond the standard setting of conditionally independent sub-Gaussian noise to a broad class of non-Gaussian distributions (sub-Gaussian, bounded, sub-exponential, variance/moment-bounded) and apply to both correlated and uncorrelated noise. The work compares the induced uncertainty regions against existing bounds and demonstrates tightness via applications to safe control.
Significance. If the derivations hold, the results would provide a useful extension of uniform concentration tools for kernel regression to more general noise settings, which is relevant for uncertainty quantification in safety-critical domains. Handling correlated noise and multiple tail behaviors addresses a practical gap, though the strength depends on whether the dependence structures are fully characterized.
major comments (1)
- [Abstract and main theorem on correlated noise] Abstract and main theorem on correlated noise: the claim that the uniform bounds apply directly to correlated noise is load-bearing for the 'broad class' contribution, yet no explicit weak-dependence condition (e.g., summable alpha-mixing coefficients, martingale difference structure, or beta-mixing rate) is stated. Standard empirical-process arguments for the supremum over the kernel feature map require such conditions to guarantee that the deviation probability remains non-asymptotic and decays at the claimed rate; arbitrary correlation can inflate the variance term and invalidate the bound.
Simulated Author's Rebuttal
We thank the referee for the careful reading and constructive feedback on our manuscript. We address the major comment below and will incorporate the necessary clarifications in the revised version.
read point-by-point responses
-
Referee: [Abstract and main theorem on correlated noise] Abstract and main theorem on correlated noise: the claim that the uniform bounds apply directly to correlated noise is load-bearing for the 'broad class' contribution, yet no explicit weak-dependence condition (e.g., summable alpha-mixing coefficients, martingale difference structure, or beta-mixing rate) is stated. Standard empirical-process arguments for the supremum over the kernel feature map require such conditions to guarantee that the deviation probability remains non-asymptotic and decays at the claimed rate; arbitrary correlation can inflate the variance term and invalidate the bound.
Authors: We agree with the referee that the claim regarding correlated noise requires explicit weak-dependence conditions for the non-asymptotic uniform bounds to hold rigorously. Standard empirical process techniques indeed demand control on the dependence to ensure the supremum deviation concentrates at the stated rate. In the original manuscript, the noise classes (including moment-bounded and sub-exponential) were intended to encompass certain dependent structures, but we did not state the required mixing or martingale conditions explicitly. In the revision, we will add precise assumptions to the main theorem and assumptions section—for instance, requiring the noise process to be strongly mixing with summable alpha-mixing coefficients or to satisfy a martingale difference property with respect to a suitable filtration. These will be reflected in the abstract as well. This addresses the concern without altering the core technical contributions. revision: yes
Circularity Check
No circularity detected; bounds derived from standard concentration extensions
full rationale
The paper's central contribution is the derivation of non-asymptotic uniform error bounds for kernel regression under extended noise classes (sub-Gaussian, sub-exponential, moment-bounded, and correlated cases). No step in the provided abstract or described derivation reduces the target bound to a self-definition, a fitted parameter renamed as a prediction, or a load-bearing self-citation chain. The argument applies known tail inequalities and empirical process tools to new settings without importing uniqueness theorems or ansatzes from prior self-work that would collapse the claim. The derivation remains self-contained against external benchmarks such as standard sub-Gaussian concentration results.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The noise distribution belongs to one of the classes sub-Gaussian, bounded, sub-exponential, or variance/moment-bounded
- domain assumption The kernel regression problem satisfies standard regularity conditions on the reproducing kernel Hilbert space and the sampling points
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We propose novel non-asymptotic probabilistic uniform error bounds for kernel-based regression... sub-Gaussian, bounded, sub-exponential, and variance/moment-bounded noise... correlated and uncorrelated noise.
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
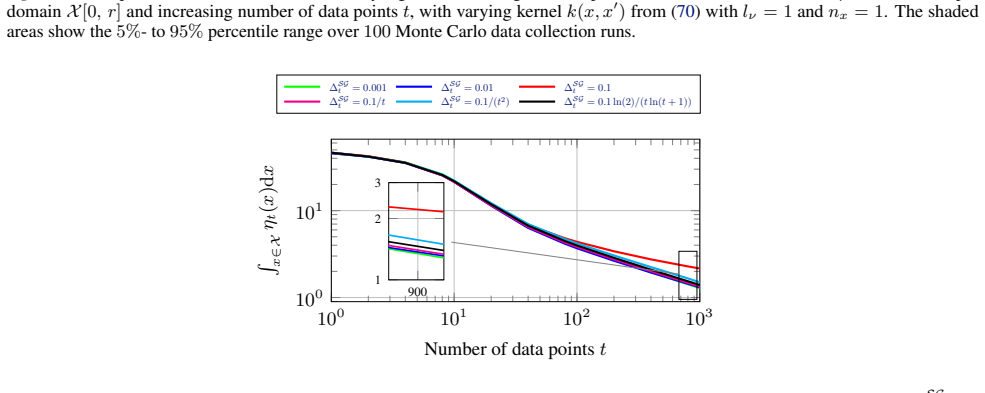
Lemma 3.1... ηt(x) = B σ̃t(x) + ηMt(x) ... concentration inequalities for the respective distribution class
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Online learning for linearly parametrized control problems , author=. 2013 , school =
work page 2013
-
[2]
Stochastic model predictive control for sub-
Ao, Yunke and K. Stochastic model predictive control for sub-. arXiv preprint arXiv:2503.08795 , year=
-
[3]
Bayesian optimization with safety constraints: safe and automatic parameter tuning in robotics , author=. Machine learning , volume=. 2023 , publisher=
work page 2023
-
[4]
International Conference on Machine Learning , pages=
On kernelized multi-armed bandits , author=. International Conference on Machine Learning , pages=
-
[5]
Advances in Neural Information Processing Systems , volume=
Bayesian optimization under heavy-tailed payoffs , author=. Advances in Neural Information Processing Systems , volume=
-
[6]
Advances in Neural Information Processing Systems , volume=
Deep reinforcement learning in a handful of trials using probabilistic dynamics models , author=. Advances in Neural Information Processing Systems , volume=
-
[7]
Advances in Neural Information Processing Systems , volume=
Efficient model-based reinforcement learning through optimistic policy search and planning , author=. Advances in Neural Information Processing Systems , volume=
-
[8]
How do noise tails impact on deep
Fan, Jianqing and Gu, Yihong and Zhou, Wen-Xin , journal=. How do noise tails impact on deep. 2024 , publisher=
work page 2024
-
[9]
Fiedler, Christian , journal=
-
[10]
Practical and rigorous uncertainty bounds for
Fiedler, Christian and Scherer, Carsten W and Trimpe, Sebastian , booktitle=. Practical and rigorous uncertainty bounds for
-
[11]
Fiedler, Christian and Menn, Johanna and Kreisk. On Safety in Safe. Transactions on Machine Learning Research , issn=
-
[12]
Learning-based symbolic abstractions for nonlinear control systems , author=. Automatica , volume=. 2022 , publisher=
work page 2022
-
[13]
a \"a and Richard Scharff and Lennart S \
Bri-Mathias Hodge and Debra Lew and Michael Milligan and Emilio G \'o mez-L \'a zaro and Lars \'e n, \ Xiaoli Guo\ and Gregor Giebel and Hannele Holttinen and Samuli Sillanp \"a \"a and Richard Scharff and Lennart S \"o der and Damian Flynn. Wind Power Forecasting Error Distributions: An International Comparison. Proceedings of 11th International Workshop...
work page 2012
-
[14]
Time-uniform Chernoff bounds via nonnegative supermartingales , author=. Probability Surveys , volume=
-
[15]
A tail inequality for quadratic forms of subgaussian random vectors , journal=
Hsu, Daniel and Kakade, Sham and Zhang, Tong , year=. A tail inequality for quadratic forms of subgaussian random vectors , journal=
- [16]
-
[17]
Johnson, J. B. , year = 1928, journal =. Thermal
work page 1928
-
[18]
arXiv preprint arXiv:2506.17366 , year=
Gaussian Processes and Reproducing Kernels: Connections and Equivalences , author=. arXiv preprint arXiv:2506.17366 , year=
-
[19]
7th Annual Learning for Dynamics & Control Conference , pages=
Outlier-Robust Linear System Identification Under Heavy-Tailed Noise , author=. 7th Annual Learning for Dynamics & Control Conference , pages=. 2025 , organization=
work page 2025
-
[20]
Conference On Learning Theory , pages=
Information directed sampling and bandits with heteroscedastic noise , author=. Conference On Learning Theory , pages=. 2018 , organization=
work page 2018
-
[21]
Optimal kernel regression bounds under energy-bounded noise , volume =
Lahr, Amon and K\". Optimal kernel regression bounds under energy-bounded noise , volume =. Advances in Neural Information Processing Systems , pages =
-
[22]
Gaussian Processes in Control: Performance Guarantees through Efficient Learning , author=. 2023 , school=
work page 2023
-
[23]
Lederer, Armin and Umlauft, Jonas and Hirche, Sandra , journal=. Uniform error bounds for
-
[24]
arXiv preprint arXiv:2009.06202 , year=
Risk bounds for robust deep learning , author=. arXiv preprint arXiv:2009.06202 , year=
-
[25]
Deterministic error bounds for kernel-based learning techniques under bounded noise , author=. Automatica , volume=. 2021 , publisher=
work page 2021
-
[26]
Regularized least squares learning with heavy-tailed noise is minimax optimal , volume =
Mollenhauer, Mattes and Muecke, Nicole and Meunier, Dimitri and Gretton, Arthur , booktitle =. Regularized least squares learning with heavy-tailed noise is minimax optimal , volume =
-
[27]
Molodchyk, Oleksii and Teutsch, Johannes and Faulwasser, Timm , booktitle=. Towards safe. 2025 , organization=
work page 2025
-
[28]
Advances in Neural Information Processing Systems , volume=
Identification of analytic nonlinear dynamical systems with non-asymptotic guarantees , author=. Advances in Neural Information Processing Systems , volume=
-
[29]
Omainska, Marco and Yamauchi, Junya and Lederer, Armin and Hirche, Sandra and Fujita, Masayuki , journal=. Rigid motion. 2023 , publisher=
work page 2023
-
[30]
Rasmussen, Carl Edward and Williams, Christopher K. I. , publisher =. 2006 , address =
work page 2006
-
[31]
Reed, Robert and Laurenti, Luca and Lahijanian, Morteza , journal=. Error bounds for
-
[32]
Robust uncertainty bounds in reproducing kernel
Scharnhorst, Paul and Maddalena, Emilio T and Jiang, Yuning and Jones, Colin N , journal=. Robust uncertainty bounds in reproducing kernel. 2022 , publisher=
work page 2022
-
[33]
Schölkopf, Bernhard and Smola, Alexander J. , publisher =. Learning with. 2001 , shorttitle =
work page 2001
-
[34]
Understanding machine learning: From theory to algorithms , author=. 2014 , publisher=
work page 2014
-
[35]
Conference On Learning Theory , pages=
Learning without mixing: Towards a sharp analysis of linear system identification , author=. Conference On Learning Theory , pages=. 2018 , organization=
work page 2018
-
[36]
Gaussian process optimization in the bandit setting:
Srinivas, Niranjan and Krause, Andreas and Kakade, Sham M and Seeger, Matthias , journal=. Gaussian process optimization in the bandit setting:
-
[37]
Safe exploration for optimization with
Sui, Yanan and Gotovos, Alkis and Burdick, Joel and Krause, Andreas , booktitle=. Safe exploration for optimization with. 2015 , organization=
work page 2015
- [38]
-
[39]
Journal of Economic Literature , author=
Gibrat's. Journal of Economic Literature , author=. 1997 , pages=
work page 1997
-
[40]
High-dimensional probability: An introduction with applications in data science , author=. 2018 , publisher=
work page 2018
-
[41]
High-dimensional statistics: A non-asymptotic viewpoint , author=. 2019 , publisher=
work page 2019
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.