Recognition: 2 theorem links
· Lean TheoremEfficient Multi-Robot Motion Planning with Precomputed Translation-Invariant Edge Bundles
Pith reviewed 2026-05-12 02:35 UTC · model grok-4.3
The pith
A library of precomputed translation-invariant trajectory segments guides action selection to make multi-robot motion planning faster and more scalable.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
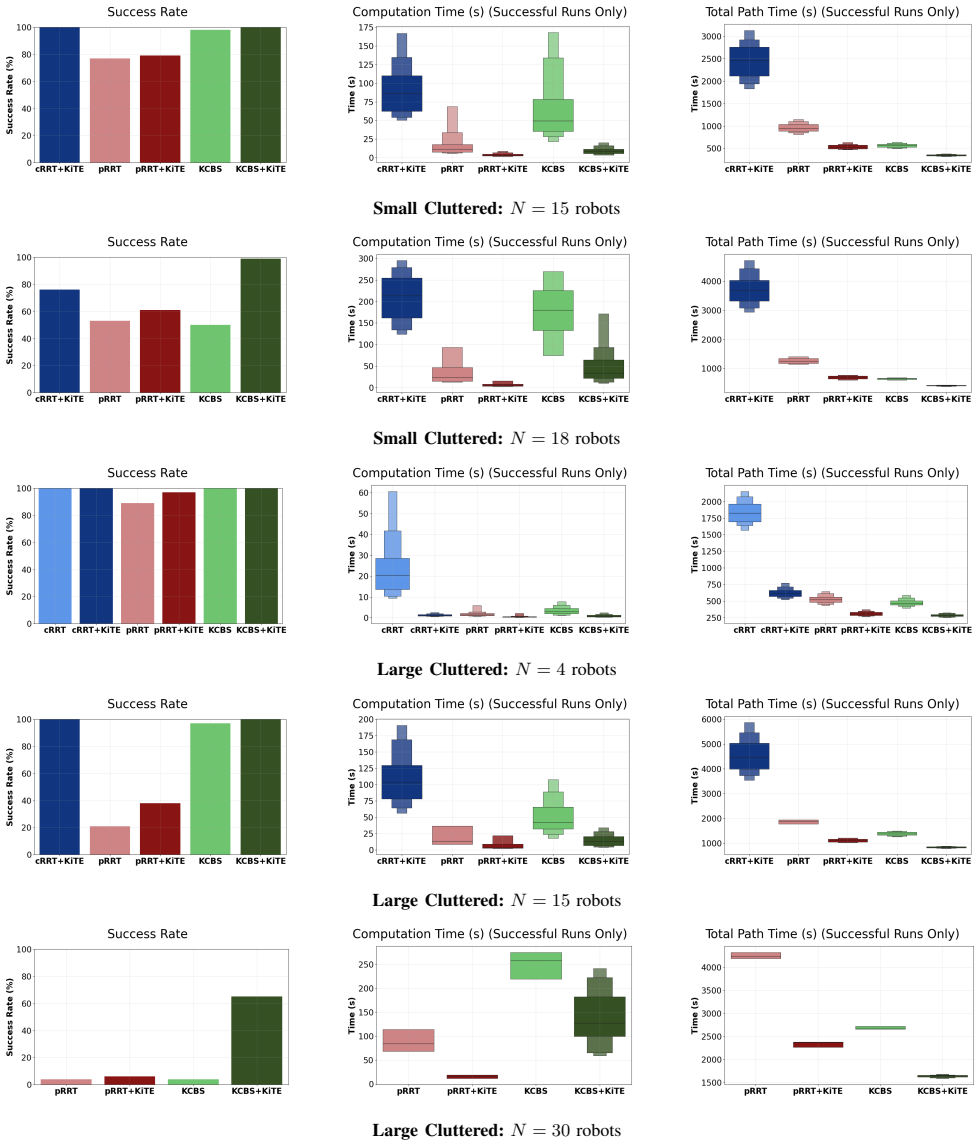
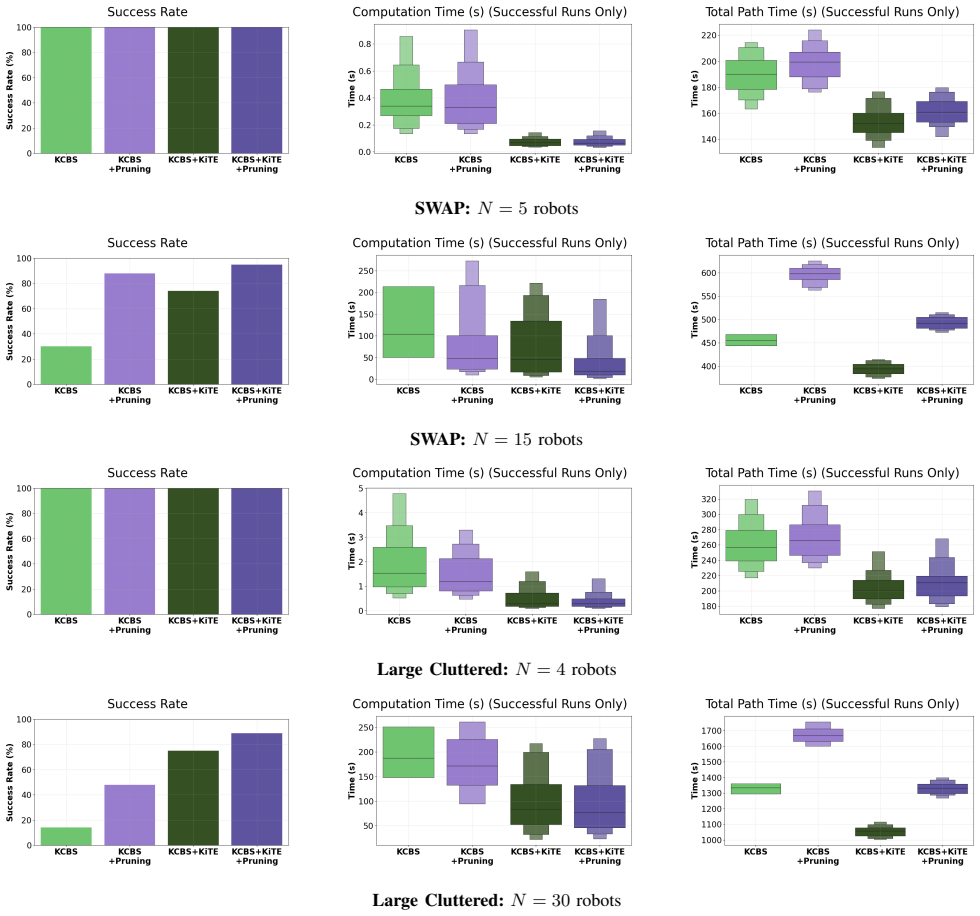
KiTE-Extend supplies a planner-agnostic action selection layer that draws from an offline library of translation-invariant trajectory segments; by directing the sampler toward promising motion pieces, it lets the underlying planner explore feasible regions more efficiently in the presence of dense robot-robot constraints, without any modification to propagation, collision, or cost functions, thereby lowering planning time and raising the number of robots that can be handled in centralized, prioritized, and conflict-based frameworks.
What carries the argument
The offline library of translation-invariant edge bundles, which supplies reusable trajectory segments that remain valid after any spatial shift and are used solely to select the next action during online search.
If this is right
- Centralized, prioritized, and conflict-based multi-robot planners can solve instances with more robots before the allotted time expires.
- The same library produces modest speed-ups for single-robot problems but larger speed-ups once inter-robot constraints become dense.
- No changes are required to the theoretical completeness or optimality properties of the planner that receives the new action-selection step.
- The approach remains compatible with any sampling-based kinodynamic planner that already performs state propagation and collision checks.
Where Pith is reading between the lines
- The same precomputation idea could be tried for other symmetries such as rotation or scaling when the motion primitives are known to repeat under those transforms.
- Because the library is built once and then reused, the method may support frequent replanning in changing environments if the segments remain useful after small scene edits.
- Hardware experiments on physical robots would reveal whether the simulated benefits survive unmodeled dynamics and perception noise.
- The technique might combine with learned cost functions to further bias the selection of segments toward low-cost regions.
Load-bearing premise
A single fixed library of translation-invariant trajectory segments computed once offline will continue to steer planning effectively for many different robot dynamics, scene layouts, and densities of robot interactions without any further adaptation.
What would settle it
Apply the same library to a kinodynamic system or environment outside the tested set and measure whether planning time stays the same or increases compared with the unmodified base planner.
Figures








read the original abstract
Solving multi-robot motion planning (MRMP) requires generating collision-free kinodynamically feasible trajectories for multiple interacting robots. We introduce Kinodynamic Translation-Invariant Edge Bundles or KiTE-Extend, a planner-agnostic action selection mechanism for sampling-based kinodynamic motion planning. KiTE-Extend uses a library of trajectory segments computed offline to guide action selection during online planning, improving the ability of existing planners to identify feasible motion segments without altering state propagation, collision checking, or cost evaluation, and without changing their theoretical guarantees. While KiTE-Extend can modestly improve single-agent planners, its benefits are most clear in the multi-agent setting, where it is able to explore more effectively and significantly improve planning through the dense spatiotemporal constraints introduced by robot-robot interaction. Through experiments on multiple kinodynamic systems and environments, we show that KiTE-Extend reduces planning time and improves scalability across the three most common MRMP paradigms: centralized, prioritized, and conflict-based.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces KiTE-Extend, a planner-agnostic action selection mechanism for sampling-based kinodynamic multi-robot motion planning. It uses a precomputed library of translation-invariant trajectory segments to guide online action selection in existing planners, without modifying state propagation, collision checking, cost evaluation, or theoretical guarantees. Experiments on multiple kinodynamic systems and environments are claimed to show reduced planning time and improved scalability across centralized, prioritized, and conflict-based MRMP paradigms.
Significance. If the results hold, the work offers a practical enhancement to MRMP by leveraging offline precomputation to better navigate dense robot-robot constraints, while remaining compatible with standard planners. This could improve scalability for larger teams without sacrificing correctness, addressing a core computational bottleneck in the field.
major comments (1)
- The central claim that the fixed offline library provides effective guidance for improved scalability rests on its generalizability. The method description does not include explicit analysis or additional experiments testing performance under increased robot density, altered obstacle scales, or dynamics shifts beyond the precomputation conditions; this is load-bearing because invalid segment proposals would negate time gains while preserving correctness.
Simulated Author's Rebuttal
We thank the referee for the constructive review and for recognizing the potential significance of KiTE-Extend as a planner-agnostic enhancement to kinodynamic MRMP. We address the major comment point by point below, providing clarification on the role of translation invariance and the scope of our experimental evaluation.
read point-by-point responses
-
Referee: The central claim that the fixed offline library provides effective guidance for improved scalability rests on its generalizability. The method description does not include explicit analysis or additional experiments testing performance under increased robot density, altered obstacle scales, or dynamics shifts beyond the precomputation conditions; this is load-bearing because invalid segment proposals would negate time gains while preserving correctness.
Authors: We agree that generalizability of the offline library is central to the scalability claims and appreciate the opportunity to clarify. The design of KiTE-Extend centers on translation-invariant trajectory bundles, which are precomputed once for a given kinodynamic system and can then be rigidly translated to any workspace location. This invariance ensures that segment proposals remain dynamically valid and collision-free (subject to online checking) independent of absolute position, directly supporting reuse across different robot placements without invalidating the time savings. Our experiments evaluate the approach on multiple distinct kinodynamic systems (each with its own precomputed library) and several environments featuring varied obstacle layouts and scales. Scalability results are reported while systematically increasing team size, which inherently increases robot-robot interaction density; consistent planning-time reductions are observed in these denser regimes across centralized, prioritized, and conflict-based paradigms. We do not assert invariance to arbitrary dynamics parameter shifts or untested obstacle scales outside the evaluated conditions. To make these aspects more explicit, we will revise the manuscript to add a dedicated discussion subsection on generalizability, supported by references to the existing multi-system and multi-environment results and any clarifying analysis that can be extracted from the current data. revision: yes
Circularity Check
No significant circularity in derivation chain
full rationale
The paper introduces KiTE-Extend as an offline-precomputed library of translation-invariant trajectory segments used to guide online action selection in sampling-based MRMP planners. The abstract and description contain no equations, derivations, or claims that reduce the reported planning-time reductions or scalability improvements to fitted parameters, self-referential quantities, or inputs by construction. Benefits are presented as arising from improved exploration under robot-robot constraints, demonstrated via experiments across centralized, prioritized, and conflict-based paradigms on multiple systems, without altering planner guarantees or relying on load-bearing self-citations for the core mechanism.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Trajectory segments exhibit translation invariance sufficient for bundling across the tested kinodynamic systems
- domain assumption Consulting the precomputed library improves exploration without violating the original planner's completeness or optimality guarantees
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclearKiTE-Extend uses a library of trajectory segments computed offline to guide action selection during online planning... translation-invariant kinodynamic edge bundles
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclearedge bundles... generated offline... (κ, u, T, x_f) where κ denotes the projection of the start state onto its translation-invariant components
Reference graph
Works this paper leans on
-
[1]
State supervised steering function for sampling-based kinodynamic plan- ning
Pranav Atreya and Joydeep Biswas. State supervised steering function for sampling-based kinodynamic plan- ning. InInternational Conference on Autonomous Agents and Multiagent Systems (AAMAS), 2022
work page 2022
-
[2]
Train-once plan-anywhere kinodynamic motion planning via diffusion trees
Yaniv Hassidof, Tom Jurgenson, and Kiril Solovey. Train-once plan-anywhere kinodynamic motion planning via diffusion trees. InConference on Robot Learning, pages 1847–1878. PMLR, 2025
work page 2025
-
[3]
David Hsu, Robert Kindel, Jean-Claude Latombe, and Stephen Rock. Randomized kinodynamic motion plan- ning with moving obstacles.The International Journal of Robotics Research, 21(3):233–255, 2002
work page 2002
-
[4]
db-CBS: Dependency-based conflict-based search
IMRCLab. db-CBS: Dependency-based conflict-based search. https://github.com/IMRCLab/db-CBS, 2023. Ac- cessed: December 2025
work page 2023
-
[5]
Rrt-blossom: Rrt with a local flood-fill behavior
Maciej Kalisiak and Michiel van de Panne. Rrt-blossom: Rrt with a local flood-fill behavior. InProceedings 2006 IEEE International Conference on Robotics and Automation, 2006. ICRA 2006., pages 1237–1242. IEEE, 2006
work page 2006
-
[6]
Gupta, Ondrej Miksik, Vibhav Vineet, Pascal Fua, and Ashish Kapoor
Justin Kottinger, Shaull Almagor, and Morteza Lahi- janian. Conflict-Based Search for Multi-Robot Mo- tion Planning with Kinodynamic Constraints. In2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 13494–13499, 2022. doi: 10. 1109/IROS47612.2022.9982018. URL https://ieeexplore. ieee.org/document/9982018
-
[7]
Randomized kinodynamic planning.The international journal of robotics research, 20(5):378–400, 2001
Steven M LaValle and James J Kuffner Jr. Randomized kinodynamic planning.The international journal of robotics research, 20(5):378–400, 2001
work page 2001
-
[8]
Yanbo Li, Zakary Littlefield, and Kostas E Bekris. Asymptotically optimal sampling-based kinodynamic planning.The International Journal of Robotics Re- search, 35(5):528–564, 2016
work page 2016
-
[9]
Informed asymp- totically near-optimal planning for field robots with dy- namics
Zakary Littlefield and Kostas E Bekris. Informed asymp- totically near-optimal planning for field robots with dy- namics. InField and Service Robotics: Results of the 11th International Conference, pages 449–463. Springer, 2017
work page 2017
-
[10]
Danylo Malyuta, Taylor P Reynolds, Michael Szmuk, Thomas Lew, Riccardo Bonalli, Marco Pavone, and Behc ¸et Ac ¸ıkmes ¸e. Convex optimization for trajectory generation: A tutorial on generating dynamically feasible trajectories reliably and efficiently.IEEE Control Systems Magazine, 42(5):40–113, 2022
work page 2022
-
[11]
Scalable multi-robot motion planning using guidance-informed hypergraphs
Courtney McBeth, James Motes, Isaac Ngui, Marco Morales, and Nancy M Amato. Scalable multi-robot motion planning using guidance-informed hypergraphs. arXiv preprint arXiv:2311.10176, 2023
-
[12]
db-cbs: Discontinuity- bounded conflict-based search for multi-robot kinody- namic motion planning
Akmaral Moldagalieva, Joaquim Ortiz-Haro, Marc Tou- ssaint, and Wolfgang H ¨onig. db-cbs: Discontinuity- bounded conflict-based search for multi-robot kinody- namic motion planning. In2024 IEEE International Conference on Robotics and Automation (ICRA), pages 14569–14575. IEEE, 2024
work page 2024
-
[13]
Akmaral Moldagalieva, Keisuke Okumura, Amanda Pro- rok, and Wolfgang H ¨onig. db-lacam: Fast and scal- able multi-robot kinodynamic motion planning with discontinuity-bounded search and lightweight mapf. arXiv preprint arXiv:2512.06796, 2025
-
[14]
Akmaral Moldagalieva, Joaquim Ortiz-Haro, and Wolf- gang H ¨onig. db-ecbs: Interaction-aware multirobot kin- odynamic motion planning.IEEE Transactions on Robotics, 42:244–260, 2025
work page 2025
-
[15]
idb-a*: Iterative search and optimization for optimal kinodynamic motion planning
Joaquim Ortiz-Haro, Wolfgang Hoenig, Valentin N Hart- mann, and Marc Toussaint. idb-a*: Iterative search and optimization for optimal kinodynamic motion planning. IEEE Transactions on Robotics, 2024
work page 2024
-
[16]
Joaquim Ortiz-Haro, Wolfgang H ¨onig, Valentin N Hart- mann, Marc Toussaint, and Ludovic Righetti. idb- rrt: Sampling-based kinodynamic motion planning with motion primitives and trajectory optimization. In2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 10702–10709. IEEE, 2024
work page 2024
-
[17]
The virtues of laziness: Multi-query kinodynamic motion planning with lazy methods
Anuj Pasricha and Alessandro Roncone. The virtues of laziness: Multi-query kinodynamic motion planning with lazy methods. In2024 IEEE International Conference on Robotics and Automation (ICRA), pages 14286–14292. IEEE, 2024
work page 2024
-
[18]
Lqr-rrt*: Optimal sampling-based motion planning with automatically de- rived extension heuristics
Alejandro Perez, Robert Platt, George Konidaris, Leslie Kaelbling, and Tomas Lozano-Perez. Lqr-rrt*: Optimal sampling-based motion planning with automatically de- rived extension heuristics. In2012 IEEE International Conference on Robotics and Automation, pages 2537–
-
[19]
Kinodynamic mo- tion planning with state lattice motion primitives
Mihail Pivtoraiko and Alonzo Kelly. Kinodynamic mo- tion planning with state lattice motion primitives. In2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, pages 2172–2179. IEEE, 2011
work page 2011
-
[20]
Differentially constrained motion planning with state lattice motion primitives
Mihail N Pivtoraiko. Differentially constrained motion planning with state lattice motion primitives. 2012
work page 2012
-
[21]
Mike Qin, Irving Solis, James D Motes, Marco Morales, and Nancy M Amato. K-arc: Adaptive robot coordination for multi-robot kinodynamic planning.IEEE Robotics and Automation Letters, 2025
work page 2025
-
[22]
Basak Sakcak, Luca Bascetta, Gianni Ferretti, and Maria Prandini. Sampling-based optimal kinodynamic planning with motion primitives.Autonomous Robots, 43(7):1715– 1732, 2019
work page 2019
-
[23]
Learning- guided exploration for efficient sampling-based motion planning in high dimensions
Liam Schramm and Abdeslam Boularias. Learning- guided exploration for efficient sampling-based motion planning in high dimensions. In2022 International conference on robotics and automation (ICRA), pages 4429–4435. IEEE, 2022
work page 2022
-
[24]
John Schulman, Yan Duan, Jonathan Ho, Alex Lee, Ibrahim Awwal, Henry Bradlow, Jia Pan, Sachin Patil, Ken Goldberg, and Pieter Abbeel. Motion planning with sequential convex optimization and convex colli- sion checking.The International Journal of Robotics Research, 33(9):1251–1270, 2014
work page 2014
-
[25]
Asymptoti- cally optimal kinodynamic planning using bundles of edges
Rahul Shome and Lydia E Kavraki. Asymptoti- cally optimal kinodynamic planning using bundles of edges. In2021 IEEE International Conference on Robotics and Automation (ICRA), pages 9988–9994. IEEE, 2021. URL https://ieeexplore.ieee.org/stamp/ stamp.jsp?arnumber=10802168
work page 2021
-
[26]
Rahul Shome, Kiril Solovey, Andrew Dobson, Dan Halperin, and Kostas E Bekris. drrt*: Scalable and in- formed asymptotically-optimal multi-robot motion plan- ning.Autonomous Robots, 44(3):443–467, 2020
work page 2020
-
[27]
St- cbs: Spatio-temporal conflict based search in continuous space for multi-agent pathfinding
Joonyeol Sim, Seonghyeon Lim, and Changjoo Nam. St- cbs: Spatio-temporal conflict based search in continuous space for multi-agent pathfinding. InProceedings of the 40th ACM/SIGAPP Symposium on Applied Computing, pages 815–822, 2025
work page 2025
-
[28]
Multi-agent pathfinding: Definitions, variants, and benchmarks
Roni Stern, Nathan Sturtevant, Ariel Felner, Sven Koenig, Hang Ma, Thayne Walker, Jiaoyang Li, Dor Atzmon, Liron Cohen, TK Kumar, et al. Multi-agent pathfinding: Definitions, variants, and benchmarks. In Proceedings of the International Symposium on Combi- natorial Search, volume 10, pages 151–158, 2019
work page 2019
-
[29]
Biwei Tang, Kui Xiang, Muye Pang, and Zhu Zhanxia. Multi-robot path planning using an improved self-adaptive particle swarm optimization.Interna- tional Journal of Advanced Robotic Systems, 17(5): 1729881420936154, 2020
work page 2020
-
[30]
Prioritized motion planning for multiple robots
Jur P Van Den Berg and Mark H Overmars. Prioritized motion planning for multiple robots. In2005 IEEE/RSJ International Conference on Intelligent Robots and Sys- tems, pages 430–435. IEEE, 2005
work page 2005
-
[31]
Subdimensional expansion for multirobot path planning.Artificial intel- ligence, 219:1–24, 2015
Glenn Wagner and Howie Choset. Subdimensional expansion for multirobot path planning.Artificial intel- ligence, 219:1–24, 2015
work page 2015
-
[32]
Kinodynamic rrt*: Asymptotically optimal motion planning for robots with linear dynamics
Dustin J Webb and Jur Van Den Berg. Kinodynamic rrt*: Asymptotically optimal motion planning for robots with linear dynamics. In2013 IEEE international conference on robotics and automation, pages 5054–5061. IEEE, 2013
work page 2013
-
[33]
Prioritized multi-agent path finding for dif- ferential drive robots
Konstantin Yakovlev, Anton Andreychuk, and Vitaly V orobyev. Prioritized multi-agent path finding for dif- ferential drive robots. In2019 European Conference on Mobile Robots (ECMR), pages 1–6, 2019. doi: 10.1109/ECMR.2019.8870957
-
[34]
Xiaotong Zhang, Yuanjing Wang, Siyu Teng, Luxi Li, and Long Chen. Alternating partition prioritized plan- ning for scalable multi-robot coordination in congested environments.IEEE Robotics and Automation Letters, 2025. APPENDIX Contents A Results for the Unicycle model . . . . . 12 B Results for the Second Order Car model 16 C Results for the Double Integ...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.