Recognition: no theorem link
Harnessing Floating Car Data, Traffic Camera Observations, and Network Flow Analysis for Traffic Volume Estimation
Pith reviewed 2026-05-12 04:33 UTC · model grok-4.3
The pith
Fusing floating car trajectories with traffic cameras produces network-wide volume estimates that respect physical flow laws and improve on trajectory-only accuracy.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The hybrid modeling framework fuses probe-vehicle trajectory data and municipal traffic camera observations by embedding kinematic features from the Cell Transmission Model within a graph neural network. It calibrates predictions using an Ensemble Square-Root Kalman filter on camera data and employs a topology-informed flow-weighted transition matrix to propagate corrections network-wide. Demonstrated in Manhattan, New York City, the method yields improved accuracy over trajectory-based estimates while ensuring physically plausible and network-consistent traffic flows with uncertainty quantification.
What carries the argument
The topology-informed flow-weighted transition matrix that propagates camera corrections to unobserved road segments while the CTM-embedded GNN enforces flow conservation, capacity limits, and spillback dynamics.
If this is right
- Network-wide traffic volume estimates become available even with limited camera locations.
- Estimates remain consistent with traffic flow conservation and road capacities.
- Short-horizon forecasts can be generated alongside state estimates.
- Uncertainty estimates are produced to support decision-making under data constraints.
- The framework handles varying availability of trajectory and camera sensors.
Where Pith is reading between the lines
- Similar fusion approaches could apply to other cities with mixed sensor data for traffic monitoring.
- Integrating this with predictive models might enhance real-time traffic control systems.
- Testing on larger networks could reveal scalability limits of the propagation matrix.
- Policy evaluations could use the calibrated volumes to assess interventions like congestion pricing more reliably.
Load-bearing premise
The topology-informed flow-weighted transition matrix and CTM-derived features allow accurate propagation of camera corrections to unobserved segments without violating network flow conservation or capacity limits.
What would settle it
Checking whether estimated flows on unobserved Manhattan segments, when aggregated over closed sub-networks, conserve total vehicle counts or exceed known capacities compared to independent ground-truth observations.
Figures




read the original abstract
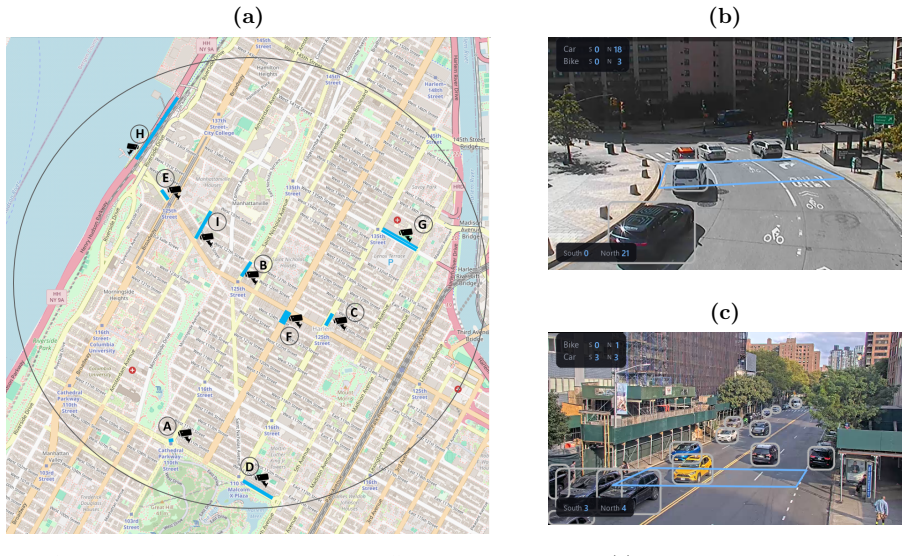
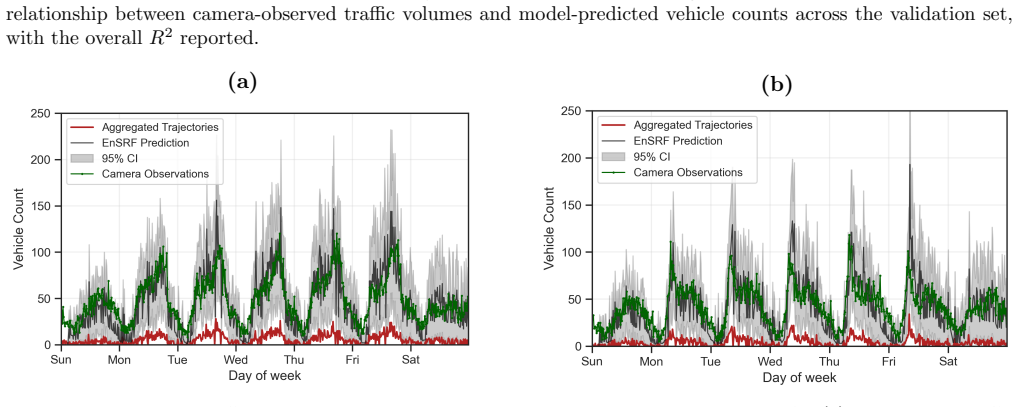
Cities increasingly rely on vehicle trajectory data to monitor traffic conditions; however, such data offer only a partial and spatially heterogeneous view of network dynamics and exhibit systematic biases across corridors and time periods. In contrast, surveillance cameras can provide high-fidelity traffic information, but only at a limited set of locations, typically sparsely distributed across the road network. We present a hybrid modeling and calibration framework that fuses these complementary data sources to produce physically consistent, network-wide estimates and short-horizon forecasts of traffic volumes. The framework leverages kinematic features derived from the Cell Transmission Model (CTM) formulation within a graph neural network (GNN). By enforcing traffic-flow conservation, capacity limits, and spillback dynamics, the CTM provides a physically grounded representation of traffic flow, while the GNN learns the spatiotemporal evolution of traffic states over the entire road network. To calibrate the model predictions on traffic camera observations, we use a progressive data-assimilation scheme based on an Ensemble Square-Root Kalman filter (EnSRF). A topology-informed flow-weighted transition matrix is further employed to propagate camera-driven corrections to unobserved road segments, enabling real-time, network-wide traffic state and volume estimation. The approach is demonstrated using probe-vehicle trajectory data and municipal traffic cameras in Manhattan, New York City, where it achieves improved accuracy relative to trajectory-based estimates while maintaining physically plausible and network-consistent traffic flows. The proposed framework accommodates varying sensor availability and produces calibrated traffic volumes with uncertainty estimates, supporting operational monitoring and evaluation of transportation policies in data-constrained urban environments.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a hybrid framework fusing probe-vehicle trajectory data with sparse traffic camera observations for network-wide traffic volume estimation and short-term forecasting. It embeds Cell Transmission Model (CTM) kinematic features in a Graph Neural Network (GNN) to enforce physical constraints (conservation, capacity, spillback), employs an Ensemble Square-Root Kalman Filter (EnSRF) for progressive assimilation of camera data, and uses a topology-informed flow-weighted transition matrix to propagate corrections to unobserved links. The approach is demonstrated on Manhattan, NYC data, claiming improved accuracy over trajectory-only estimates while producing physically plausible, network-consistent flows with uncertainty quantification.
Significance. If the network-consistency guarantees hold under the stated propagation mechanism, the work offers a practical advance for urban traffic monitoring by enabling calibrated, physically grounded estimates from heterogeneous and incomplete sensors. The CTM-GNN integration and EnSRF assimilation provide a reusable template for data-constrained transportation systems, with potential operational value for policy evaluation and real-time management.
major comments (2)
- [§4] §4 (Assimilation and propagation): The central claim that camera corrections are propagated network-wide while preserving physical consistency (flow conservation, capacity limits, no spurious spillback) rests on the topology-informed flow-weighted transition matrix. The manuscript describes the matrix as 'topology-informed flow-weighted' but does not specify whether the weights are recomputed from the current assimilated state or derived statically from historical averages or adjacency. If static, a positive correction on one incoming link can produce node-level imbalances on unobserved outgoing links, violating the conservation axiom the framework claims to enforce. Explicit post-propagation diagnostics (e.g., node divergence norms or capacity-violation counts) are required to secure this load-bearing step.
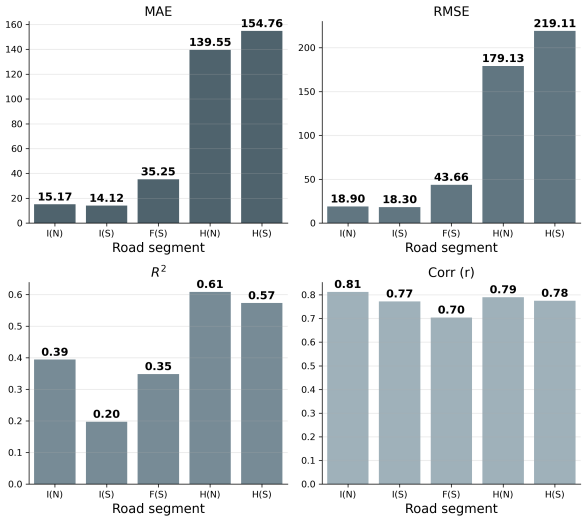
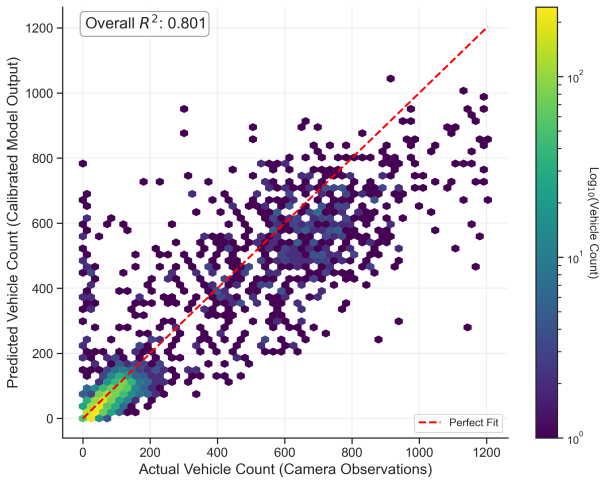
- [Results] Results (Manhattan demonstration): The abstract asserts 'improved accuracy relative to trajectory-based estimates' and 'physically plausible' flows, yet the manuscript provides no quantitative tables or figures reporting RMSE, MAE, bias, or coverage of uncertainty intervals against held-out camera or loop-detector ground truth. Without baselines, ablation of the transition matrix, or error bars across multiple periods, the performance claim cannot be evaluated and the physical-consistency guarantee remains unverified.
minor comments (2)
- [§2] Notation: The symbols for the GNN state vector, EnSRF ensemble members, and transition-matrix entries should be defined once in a dedicated nomenclature table or early subsection to avoid repeated re-definition across sections.
- [Figure 3] Figure clarity: The network diagram showing observed vs. unobserved links and the propagation arrows should include a legend distinguishing static topology weights from any state-dependent components.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed review. We address the major comments point by point below and agree that targeted revisions will strengthen the manuscript's clarity and evidential support.
read point-by-point responses
-
Referee: [§4] §4 (Assimilation and propagation): The central claim that camera corrections are propagated network-wide while preserving physical consistency (flow conservation, capacity limits, no spurious spillback) rests on the topology-informed flow-weighted transition matrix. The manuscript describes the matrix as 'topology-informed flow-weighted' but does not specify whether the weights are recomputed from the current assimilated state or derived statically from historical averages or adjacency. If static, a positive correction on one incoming link can produce node-level imbalances on unobserved outgoing links, violating the conservation axiom the framework claims to enforce. Explicit post-propagation diagnostics (e.g., node divergence norms or capacity-violation counts) are required to secure this load-bearing step.
Authors: We appreciate this observation on the propagation mechanism. The flow-weighted transition matrix is intended to be recomputed dynamically from the latest CTM-GNN state estimates at each assimilation cycle to respect current flows and enforce conservation. However, the manuscript's description in §4 is insufficiently explicit on this point. We will revise §4 to provide the precise update rule for the weights and will add post-propagation diagnostics (node divergence norms and capacity-violation counts) to the results section to verify that physical consistency is maintained after correction propagation. revision: yes
-
Referee: [Results] Results (Manhattan demonstration): The abstract asserts 'improved accuracy relative to trajectory-based estimates' and 'physically plausible' flows, yet the manuscript provides no quantitative tables or figures reporting RMSE, MAE, bias, or coverage of uncertainty intervals against held-out camera or loop-detector ground truth. Without baselines, ablation of the transition matrix, or error bars across multiple periods, the performance claim cannot be evaluated and the physical-consistency guarantee remains unverified.
Authors: We agree that the quantitative evaluation requires more explicit and comprehensive presentation. The Manhattan demonstration includes comparative results, but we acknowledge that dedicated tables for RMSE, MAE, bias, and uncertainty coverage against held-out ground truth, together with baselines, transition-matrix ablations, and error bars across periods, are not sufficiently prominent. We will add these elements in the revised results section to allow direct assessment of accuracy gains and physical-consistency claims. revision: yes
Circularity Check
Framework fuses external observations with standard physical model; no derivation reduces to self-fit or self-citation by construction
full rationale
The paper's core pipeline—CTM-derived kinematic features fed to GNN, EnSRF assimilation of camera data, and topology-informed flow-weighted transition matrix for propagation—relies on external probe trajectories and municipal camera observations plus established CTM conservation rules. No equation is shown to define a quantity in terms of itself, no fitted parameter is relabeled as an independent prediction, and no load-bearing premise collapses to a prior self-citation. The Manhattan demonstration supplies an external benchmark, keeping the derivation self-contained against data not generated by the model itself.
Axiom & Free-Parameter Ledger
free parameters (2)
- GNN model parameters
- EnSRF ensemble and inflation parameters
axioms (2)
- domain assumption Traffic flow conservation, capacity limits, and spillback dynamics from the Cell Transmission Model hold across the network.
- domain assumption The topology-informed flow-weighted transition matrix accurately propagates state corrections from observed to unobserved segments.
Reference graph
Works this paper leans on
-
[1]
Juan C Herrera, Daniel B Work, Ryan Herring, Xuegang Jeff Ban, Quinn Jacobson, and Alexandre M Bayen. Evaluation of traffic data obtained via gps-enabled mobile phones: The mobile century field experiment.Trans- portation Research Part C: Emerging Technologies, 18(4):568–583, 2010
work page 2010
-
[2]
Yufei Yuan, JWC Van Lint, R Eddie Wilson, Femke van Wageningen-Kessels, and Serge P Hoogendoorn. Real- time lagrangian traffic state estimator for freeways.IEEE Transactions on Intelligent Transportation Systems, 13(1):59–70, 2012
work page 2012
-
[3]
An ensemble kalman filtering approach to highway traffic estimation using gps enabled mobile devices
Daniel B Work, Olli-Pekka Tossavainen, S´ ebastien Blandin, Alexandre M Bayen, Tochukwu Iwuchukwu, and Kenneth Tracton. An ensemble kalman filtering approach to highway traffic estimation using gps enabled mobile devices. In2008 47th IEEE Conference on Decision and Control, pages 5062–5068. IEEE, 2008
work page 2008
-
[4]
City-wide traffic volume inference with loop detector data and taxi trajectories
Chuishi Meng, Xiuwen Yi, Lu Su, Jing Gao, and Yu Zheng. City-wide traffic volume inference with loop detector data and taxi trajectories. InProceedings of the 25th ACM SIGSPATIAL international conference on advances in geographic information systems, pages 1–10, 2017
work page 2017
-
[5]
Chunguang He, Dianhai Wang, Zhengyi Cai, Jiaqi Zeng, and Fengjie Fu. A vehicle matching algorithm by maximizing travel time probability based on automatic license plate recognition data.IEEE Transactions on Intelligent Transportation Systems, 25(8):9103–9114, 2024
work page 2024
-
[6]
Andrzej Czy˙ zewski, J´ ozef Kotus, and Grzegorz Szwoch. Estimating traffic intensity employing passive acoustic radar and enhanced microwave doppler radar sensor.Remote Sensing, 12(1):110, 2019. 18
work page 2019
-
[7]
Guangtao Xue, Ke Zhang, Qi He, and Hongzi Zhu. Real-time urban traffic information estimation with a limited number of surveillance cameras.Frontiers of Computer Science, 6(5):547–559, 2012
work page 2012
-
[8]
Tsuyoshi Id´ e, Takayuki Katsuki, Tetsuro Morimura, and Robert Morris. City-wide traffic flow estimation from a limited number of low-quality cameras.IEEE Transactions on Intelligent Transportation Systems, 18(4): 950–959, 2016
work page 2016
-
[9]
Real-time traffic pattern analysis and inference with sparse video surveillance information
Yang Wang, Yiwei Xiao, Xike Xie, Ruoyu Chen, and Hengchang Liu. Real-time traffic pattern analysis and inference with sparse video surveillance information. InIJCAI, pages 3571–3577, 2018
work page 2018
-
[10]
Toru Seo, Alexandre M Bayen, Takahiko Kusakabe, and Yasuo Asakura. Traffic state estimation on highway: A comprehensive survey.Annual reviews in control, 43:128–151, 2017
work page 2017
-
[11]
Yibing Wang and Markos Papageorgiou. Real-time freeway traffic state estimation based on extended kalman filter: a general approach.Transportation Research Part B: Methodological, 39(2):141–167, 2005
work page 2005
-
[12]
Martin Treiber, Arne Kesting, and Dirk Helbing. Three-phase traffic theory and two-phase models with a fundamental diagram in the light of empirical stylized facts.Transportation Research Part B: Methodological, 44(8-9):983–1000, 2010
work page 2010
-
[13]
Joint modeling of dense and incomplete trajectories for citywide traffic volume inference
Xianfeng Tang, Boqing Gong, Yanwei Yu, Huaxiu Yao, Yandong Li, Haiyong Xie, and Xiaoyu Wang. Joint modeling of dense and incomplete trajectories for citywide traffic volume inference. InThe World Wide Web Conference, pages 1806–1817, 2019
work page 2019
-
[14]
Spatial-temporal large language model for traffic prediction
Chenxi Liu, Sun Yang, Qianxiong Xu, Zhishuai Li, Cheng Long, Ziyue Li, and Rui Zhao. Spatial-temporal large language model for traffic prediction. In2024 25th IEEE international conference on mobile data management (MDM), pages 31–40. IEEE, 2024
work page 2024
-
[15]
Estimating arterial traffic conditions using sparse probe data
Ryan Herring, Aude Hofleitner, Pieter Abbeel, and Alexandre Bayen. Estimating arterial traffic conditions using sparse probe data. In13th International IEEE Conference on Intelligent Transportation Systems, pages 929–936. IEEE, 2010
work page 2010
-
[16]
Pengkun Wang, Chaochao Zhu, Xu Wang, Zhengyang Zhou, Guang Wang, and Yang Wang. Inferring inter- section traffic patterns with sparse video surveillance information: An st-gan method.IEEE Transactions on Vehicular Technology, 71(9):9840–9852, 2022
work page 2022
-
[17]
Jiwon Kim and Hani S Mahmassani. Spatial and temporal characterization of travel patterns in a traffic network using vehicle trajectories.Transportation Research Procedia, 9:164–184, 2015
work page 2015
-
[18]
Silke K Kaiser, Filipe Rodrigues, Carlos Lima Azevedo, and Lynn H Kaack. Spatio-temporal graph neural network for urban spaces: Interpolating citywide traffic volume.arXiv preprint arXiv:2505.06292, 2025
-
[19]
Ensemble square root filters.Monthly weather review, 131(7):1485–1490, 2003
Michael K Tippett, Jeffrey L Anderson, Craig H Bishop, Thomas M Hamill, and Jeffrey S Whitaker. Ensemble square root filters.Monthly weather review, 131(7):1485–1490, 2003
work page 2003
-
[20]
Geir Evensen. The ensemble kalman filter: Theoretical formulation and practical implementation.Ocean Dynamics, 53:343–367, 2003
work page 2003
-
[21]
Guangyin Jin, Yuxuan Liang, Yuchen Fang, Zezhi Shao, Jincai Huang, Junbo Zhang, and Yu Zheng. Spatio- temporal graph neural networks for predictive learning in urban computing: A survey.IEEE transactions on knowledge and data engineering, 36(10):5388–5408, 2023
work page 2023
-
[22]
Lei Bai, Lina Yao, Can Li, Xianzhi Wang, and Can Wang. Adaptive graph convolutional recurrent network for traffic forecasting.Advances in neural information processing systems, 33:17804–17815, 2020
work page 2020
-
[23]
Ling Cai, Krzysztof Janowicz, Gengchen Mai, Bo Yan, and Rui Zhu. Traffic transformer: Capturing the continuity and periodicity of time series for traffic forecasting.Transactions in GIS, 24(3):736–755, 2020
work page 2020
-
[24]
Zhiyong Cui, Kristian Henrickson, Ruimin Ke, and Yinhai Wang. Traffic graph convolutional recurrent neural network: A deep learning framework for network-scale traffic learning and forecasting.IEEE Transactions on Intelligent Transportation Systems, 21(11):4883–4894, 2019
work page 2019
-
[25]
Reducing uncertainty of low-sampling-rate trajectories
Kai Zheng, Yu Zheng, Xing Xie, and Xiaofang Zhou. Reducing uncertainty of low-sampling-rate trajectories. In2012 IEEE 28th international conference on data engineering, pages 1144–1155. IEEE, 2012
work page 2012
-
[26]
Inferring uncertain trajectories from partial observations
Prithu Banerjee, Sayan Ranu, and Sriram Raghavan. Inferring uncertain trajectories from partial observations. In2014 IEEE International Conference on Data Mining, pages 30–39. IEEE, 2014
work page 2014
-
[27]
https://doi.org/10.48550/ARXIV.2509.25164
Ranjan Sapkota, Rahul Harsha Cheppally, Ajay Sharda, and Manoj Karkee. Yolo26: key architectural en- hancements and performance benchmarking for real-time object detection.arXiv preprint arXiv:2509.25164, 2025. 19
-
[28]
Yanwei Yu, Xianfeng Tang, Huaxiu Yao, Xiuwen Yi, and Zhenhui Li. Citywide traffic volume inference with surveillance camera records.IEEE Transactions on Big Data, 7(6):900–912, 2019
work page 2019
-
[29]
Wen Deng, Hao Lei, and Xuesong Zhou. Traffic state estimation and uncertainty quantification based on heterogeneous data sources: A three detector approach.Transportation Research Part B: Methodological, 57: 132–157, 2013
work page 2013
-
[30]
Dong Ngoduy. Low-rank unscented kalman filter for freeway traffic estimation problems.Transportation research record, 2260(1):113–122, 2011
work page 2011
-
[31]
Meiye Li, Jianhua Guo, and Xiaobin Zhong. Real-time traffic flow uncertainty quantification based on nonpara- metric probability density function estimation.Journal of Transportation Engineering, Part A: Systems, 150 (11):04024074, 2024
work page 2024
-
[32]
Chuan Ding, Yingjie Song, Hongliang Zhang, and Ting Wang. Uncertainty quantification in bayesian physics- informed deep learning-based traffic state prediction.Computer-Aided Civil and Infrastructure Engineering, 40 (27):4845–4864, 2025
work page 2025
-
[33]
Traffic Data and Transportation Analytics.https://inrix.com/
INRIX. Traffic Data and Transportation Analytics.https://inrix.com/
-
[34]
Traffic Cameras Map.https://webcams.nyctmc.org/map
New York City Traffic Management Center. Traffic Cameras Map.https://webcams.nyctmc.org/map
-
[35]
Glenn Jocher and Jing Qiu. Ultralytics yolo26, 2026. URLhttps://github.com/ultralytics/ultralytics
work page 2026
-
[36]
Carlos F Daganzo. The cell transmission model: A dynamic representation of highway traffic consistent with the hydrodynamic theory.Transportation research part B: methodological, 28(4):269–287, 1994
work page 1994
-
[37]
Carlos F Daganzo. The cell transmission model, part ii: network traffic.Transportation Research Part B: Methodological, 29(2):79–93, 1995
work page 1995
-
[38]
Gordon F Newell. A simplified theory of kinematic waves in highway traffic, part i: General theory.Transporta- tion Research Part B: Methodological, 27(4):281–287, 1993
work page 1993
-
[39]
Jihua Ye, Shengjun Xue, and Aiwen Jiang. Attention-based spatio-temporal graph convolutional network con- sidering external factors for multi-step traffic flow prediction.Digital Communications and Networks, 8(3): 343–350, 2022
work page 2022
-
[40]
Multi-task learning using uncertainty to weigh losses for scene geometry and semantics
Alex Kendall, Yarin Gal, and Roberto Cipolla. Multi-task learning using uncertainty to weigh losses for scene geometry and semantics. InProceedings of the IEEE conference on computer vision and pattern recognition, pages 7482–7491, 2018
work page 2018
-
[41]
Patrick Alrassy, Jinwoo Jang, and Andrew W. Smyth. Obd-data-assisted cost-based map-matching algorithm for low-sampled telematics data in urban environments.IEEE Transactions on Intelligent Transportation Systems, 23(8):12094–12107, 2022. doi: 10.1109/TITS.2021.3109851
-
[42]
Hespanha.Linear Systems Theory
Jo˜ ao P. Hespanha.Linear Systems Theory. Princeton University Press, Princeton, NJ, 2nd edition, 2018. ISBN 9780691179575
work page 2018
-
[43]
Roger A. Horn and Charles R. Johnson.Matrix Analysis. Cambridge University Press, Cambridge, 2nd edition,
-
[44]
doi: 10.1017/CBO9781139020411. Appendix A. Observability Analysis A.1 Theory Consider a road network characterized byNdirected segments. Letx(t)∈R N denote the traffic state at discrete timet, wherex i(t) is the number of vehicles on a road segmenti. For observability analysis, we consider a Linear Time-Invariant (LTI) approximation obtained by linearizin...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.