Recognition: no theorem link
EFGCL: Learning Dynamic Motion through Spotting-Inspired External Force Guided Curriculum Learning
Pith reviewed 2026-05-12 05:14 UTC · model grok-4.3
The pith
External assistive forces during training let legged robots learn dynamic flips and jumps that standard reinforcement learning cannot achieve.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
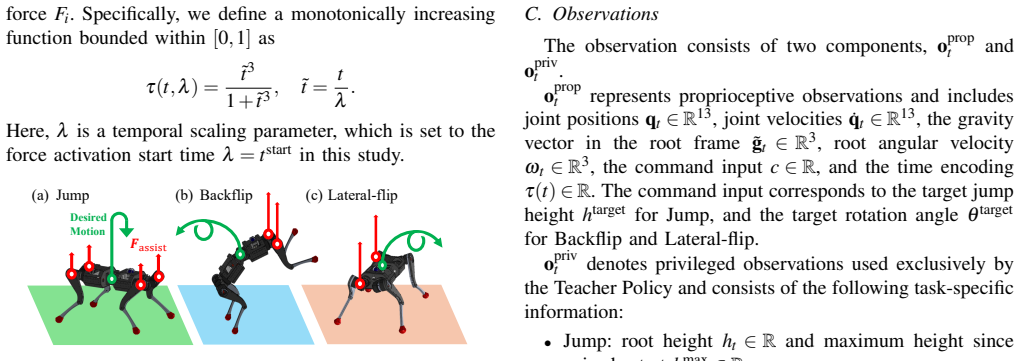
EFGCL introduces external assistive forces during reinforcement learning training to enable agents to physically experience successful executions of dynamic whole-body motions, inspired by gymnastics spotting, without task-specific reward shaping or reference trajectories.
What carries the argument
External Force Guided Curriculum Learning (EFGCL), a curriculum that applies and then removes external assistive forces to provide physical guidance for exploration in RL training of legged-robot motions.
If this is right
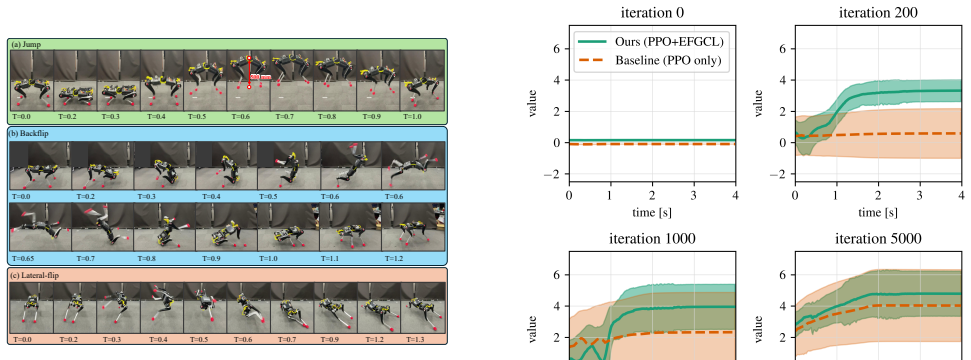
- The Jump task reaches successful policies roughly twice as fast as standard RL.
- Backflip and Lateral-Flip motions become learnable where conventional methods produce no successful policies.
- Policies trained under force guidance transfer to a real quadruped and reproduce the simulated motions.
- Physical guidance during training serves as a general strategy for dynamic whole-body tasks that avoid reward engineering or reference motion.
Where Pith is reading between the lines
- The method may reduce the need for careful reward shaping across other legged-robot skills.
- Similar force-based guidance could be tested on bipeds or manipulators performing acrobatic tasks.
- If the force schedule proves robust, it offers a route to shorten sim-to-real transfer time for high-risk motions.
Load-bearing premise
The external assistive forces can be applied in simulation so that the learned policy succeeds without them on the real robot and without task-specific tuning of how the forces are delivered.
What would settle it
A policy trained with EFGCL produces unstable or failed motion when the external forces are removed in simulation, or when the same policy is deployed on the physical robot without forces.
Figures





read the original abstract
Learning dynamic whole-body motions for legged robots through reinforcement learning (RL) remains challenging due to the high risk of failure, which makes efficient exploration difficult and often leads to unstable learning. In this paper, we propose External Force Guided Curriculum Learning (EFGCL), a guided RL approach based on the principle of physical guidance, in which external assistive forces are introduced during training. Inspired by spotting in artistic gymnastics, EFGCL enables agents to physically experience successful motion executions without relying on task-specific reward shaping or reference trajectories. Experiments on a quadrupedal robot performing Jump, Backflip, and Lateral-Flip tasks demonstrate that EFGCL accelerates learning of the Jump task by approximately a factor of two and enables the acquisition of complex whole body motions that conventional RL methods fail to learn. We further show that the learned policies can be deployed on real robot, reproducing motions consistent with those observed in simulation. These results indicate that physically guided exploration, which allows agents to experience success early in training, is an effective and general strategy for improving learning efficiency in dynamic whole-body motion tasks.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes External Force Guided Curriculum Learning (EFGCL), a reinforcement learning method for legged robots that introduces external assistive forces during training, inspired by spotting in gymnastics. This allows agents to experience successful dynamic whole-body motions (Jump, Backflip, Lateral-Flip) early without reference trajectories or task-specific reward shaping. Experiments on a quadrupedal robot show EFGCL accelerates Jump learning by a factor of approximately two, enables acquisition of complex motions where standard RL fails, and supports successful sim-to-real policy transfer with motions consistent between simulation and hardware.
Significance. If the experimental claims hold under rigorous controls, EFGCL offers a practical, generalizable strategy for improving exploration in high-risk dynamic RL tasks by leveraging physical guidance. The absence of reference motions or heavy reward engineering, combined with demonstrated real-robot deployment, positions this as a potentially impactful contribution to robotics RL for acrobatic and whole-body behaviors.
major comments (3)
- [§4] §4 (Experiments): The reported factor-of-two speedup on the Jump task lacks specification of the exact baseline RL algorithm, number of independent random seeds, variance across runs, or statistical significance testing; without these, the quantitative claim cannot be verified as robust.
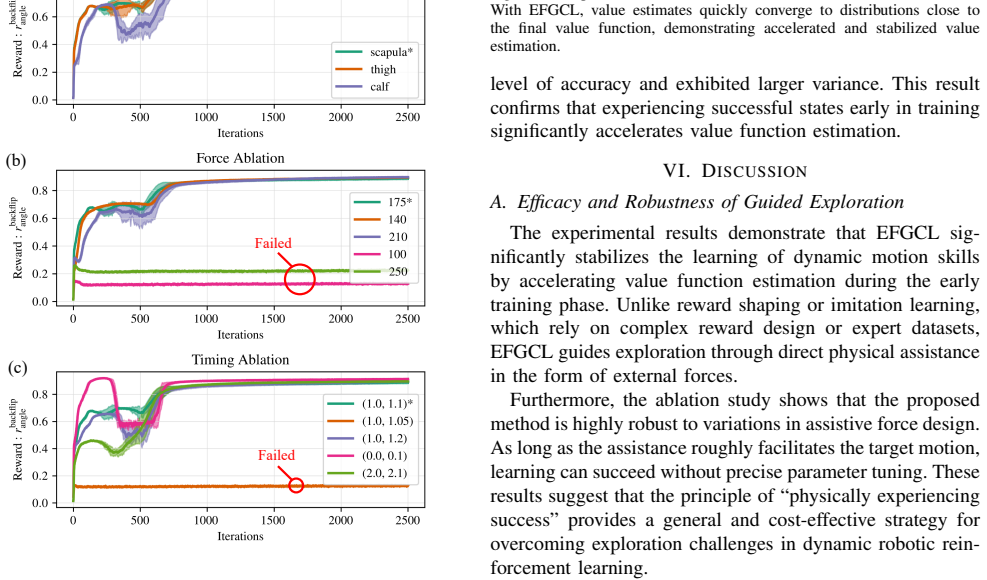
- [§3] §3 (Method): The implementation of force application (magnitudes, directions, scheduling over the curriculum, and precise removal schedule) is described at a high level but lacks equations or pseudocode for the force model and its integration into the simulator dynamics, making reproduction and assessment of potential policy bias difficult.
- [§4.3] §4.3 (Real-robot transfer): The claim of successful zero-force deployment is supported only by qualitative video consistency; no quantitative metrics (e.g., success rate, trajectory error, or torque profiles) comparing simulation and hardware are provided, weakening the transfer validation.
minor comments (2)
- [§3] Notation for the external force term and curriculum stages should be introduced with explicit symbols in §3 to improve clarity.
- [Figures] Figure captions for learning curves should include the number of trials and shading for standard deviation.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. We address each major comment below and indicate the revisions planned for the next version of the manuscript.
read point-by-point responses
-
Referee: [§4] §4 (Experiments): The reported factor-of-two speedup on the Jump task lacks specification of the exact baseline RL algorithm, number of independent random seeds, variance across runs, or statistical significance testing; without these, the quantitative claim cannot be verified as robust.
Authors: We agree that these experimental details are required to substantiate the speedup claim. The baseline is the standard PPO algorithm without external force guidance, using identical observation spaces, action spaces, and reward functions. The reported factor-of-two acceleration is derived from averaged learning curves across multiple independent runs, with variance visualized in the figures. In the revised manuscript we will explicitly state the baseline algorithm, the number of random seeds used, include numerical variance measures in the text, and add statistical significance testing to support the quantitative result. revision: yes
-
Referee: [§3] §3 (Method): The implementation of force application (magnitudes, directions, scheduling over the curriculum, and precise removal schedule) is described at a high level but lacks equations or pseudocode for the force model and its integration into the simulator dynamics, making reproduction and assessment of potential policy bias difficult.
Authors: We acknowledge that the force model is presented conceptually rather than with full implementation details. In the revision we will add the mathematical formulation of the external force (magnitude schedule as a function of curriculum stage, direction vectors aligned to the target motion, and the linear decay schedule for removal), together with pseudocode showing its integration into the MuJoCo dynamics step. We will also include a short discussion of how the guidance influences exploration while ensuring the final policy is unbiased with respect to the zero-force deployment. revision: yes
-
Referee: [§4.3] §4.3 (Real-robot transfer): The claim of successful zero-force deployment is supported only by qualitative video consistency; no quantitative metrics (e.g., success rate, trajectory error, or torque profiles) comparing simulation and hardware are provided, weakening the transfer validation.
Authors: The referee is correct that the current validation is qualitative. We performed repeated hardware trials demonstrating consistent motion execution without external forces, but did not record detailed trajectory or torque data. In the revised manuscript we will report success rates over repeated trials for both simulation and hardware and will note the practical difficulties of obtaining precise trajectory-error or torque-profile comparisons for acrobatic behaviors. This constitutes a partial revision that strengthens the section while remaining faithful to the data we collected. revision: partial
Circularity Check
No significant circularity detected
full rationale
The paper describes an empirical RL method using external assistive forces for curriculum learning on dynamic motions, validated via robot experiments. No equations, parameter fits, or derivation steps appear in the abstract or summary that reduce any claimed result to a self-definition, fitted input, or self-citation chain. The central claim (accelerated learning and successful zero-force transfer) rests on physical guidance and empirical outcomes rather than internal reductions to inputs. This is the common case of a self-contained empirical contribution.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Learning agile and dynamic motor skills for legged robots,
J. Hwangbo, J. Lee, A. Dosovitskiy, D. Bellicoso, V . Tsounis, V . Koltun, and M. Hutter, “Learning agile and dynamic motor skills for legged robots,”Science Robotics, vol. 4, no. 26, 2019
work page 2019
-
[2]
Learning robust perceptive locomotion for quadrupedal robots in the wild,
T. Miki, J. Lee, J. Hwangbo, L. Wellhausen, V . Koltun, and M. Hutter, “Learning robust perceptive locomotion for quadrupedal robots in the wild,”Science Robotics, vol. 7, no. 62, 2022. TABLE II TASK-SPECIFIC INSTANTIATIONS OF THE TASK PROGRESS REWARD. Task Target variablex t xtarget sx Jumph max t htarget 0.01 Backflipθ pitch t 2π π 2 Lateral-Flipθ roll t 2π π 2
work page 2022
-
[3]
Z. Zhuang, Z. Fu, J. Wang, C. Atkeson, S. Schwertfeger, C. Finn, and H. Zhao, “Robot parkour learning,” inConference on Robot Learning (CoRL), 2023
work page 2023
-
[4]
Robust ladder climbing with a quadrupedal robot,
D. V ogel, R. Baines, J. Church, J. Lotzer, K. Werner, and M. Hutter, “Robust ladder climbing with a quadrupedal robot,” in2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025, pp. 7239–7244
work page 2025
-
[5]
High-speed control and navigation for quadrupedal robots on complex and discrete terrain,
H. Kim, H. Oh, J. Park, Y . Kim, D. Youm, M. Jung, M. Lee, and J. Hwangbo, “High-speed control and navigation for quadrupedal robots on complex and discrete terrain,”Science Robotics, vol. 10, no. 102, p. eads6192, 2025
work page 2025
-
[6]
Kleiyn : A quadruped robot with an active waist for both locomotion and wall climbing,
K. Yoneda, K. Kawaharazuka, T. Suzuki, T. Hattori, and K. Okada, “Kleiyn : A quadruped robot with an active waist for both locomotion and wall climbing,” in2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025, pp. 8783–8789
work page 2025
-
[7]
J. Eßer, N. Bach, C. Jestel, O. Urbann, and S. Kerner, “Guided reinforcement learning: A review and evaluation for efficient and effective real-world robotics [survey],”IEEE Robotics & Automation Magazine, vol. 30, no. 2, pp. 67–85, 2022
work page 2022
-
[8]
Deepmimic: Example-guided deep reinforcement learning of physics-based char- acter skills,
X. B. Peng, P. Abbeel, S. Levine, and M. Van de Panne, “Deepmimic: Example-guided deep reinforcement learning of physics-based char- acter skills,”ACM Transactions On Graphics (TOG), vol. 37, no. 4, pp. 1–14, 2018
work page 2018
-
[9]
Learning agile robotic locomotion skills by imitating animals,
X. B. Peng, E. Coumans, T. Zhang, T.-W. E. Lee, J. Tan, and S. Levine, “Learning agile robotic locomotion skills by imitating animals,” in Robotics: Science and Systems, 07 2020
work page 2020
-
[10]
Learning robust and agile legged locomotion using adversarial motion priors,
J. Wu, G. Xin, C. Qi, and Y . Xue, “Learning robust and agile legged locomotion using adversarial motion priors,”IEEE Robotics and Automation Letters, vol. 8, no. 8, pp. 4975–4982, 2023
work page 2023
-
[11]
Opt-mimic: Imitation of optimized trajectories for dynamic quadruped behaviors,
Y . Fuchioka, Z. Xie, and M. Van de Panne, “Opt-mimic: Imitation of optimized trajectories for dynamic quadruped behaviors,” in2023 IEEE International Conference on Robotics and Automation (ICRA), 2023, pp. 5092–5098
work page 2023
-
[12]
Learning agile skills via adversarial imitation of rough partial demonstrations,
C. Li, M. Vlastelica, S. Blaes, J. Frey, F. Grimminger, and G. Mar- tius, “Learning agile skills via adversarial imitation of rough partial demonstrations,” inConference on Robot Learning. PMLR, 2023, pp. 342–352
work page 2023
-
[13]
Theoretical considerations of potential- based reward shaping for multi-agent systems,
S. Devlin and D. Kudenko, “Theoretical considerations of potential- based reward shaping for multi-agent systems,” inTenth international conference on autonomous agents and multi-agent systems. ACM, 2011, pp. 225–232
work page 2011
-
[14]
Curriculum-based reinforcement learning for quadrupedal jumping: A reference-free design,
V . Atanassov, J. Ding, J. Kober, I. Havoutis, and C. Della Santina, “Curriculum-based reinforcement learning for quadrupedal jumping: A reference-free design,”IEEE Robotics & Automation Magazine, 2024
work page 2024
-
[15]
Robust quadruped jumping via deep reinforcement learning,
G. Bellegarda, C. Nguyen, and Q. Nguyen, “Robust quadruped jumping via deep reinforcement learning,”Robotics and Autonomous Systems, vol. 182, p. 104799, 2024
work page 2024
-
[16]
Revisiting sparse rewards for goal-reaching reinforcement learning,
G. Vasan, Y . Wang, F. Shahriar, J. Bergstra, M. J ¨agersand, and A. R. Mahmood, “Revisiting sparse rewards for goal-reaching reinforcement learning,”Reinforcement Learning Journal, vol. 4, pp. 1841–1854, 2024
work page 2024
-
[17]
How spotting with touch affects skill performance and self confidence in gymnasts,
S. Sorzano, “How spotting with touch affects skill performance and self confidence in gymnasts,” Master’s thesis, Trent University (Canada), 2023
work page 2023
-
[18]
Proximal policy optimization algorithms,
J. Schulman, F. Wolski, P. Dhariwal, A. Radford, and O. Klimov, “Proximal policy optimization algorithms,” 2017
work page 2017
-
[19]
High-dimensional continuous control using generalized advantage estimation,
J. Schulman, P. Moritz, S. Levine, M. Jordan, and P. Abbeel, “High-dimensional continuous control using generalized advantage estimation,” inInternational Conference on Learning Representations (ICLR), 2016
work page 2016
-
[20]
Gpu-accelerated robotic simulation for distributed reinforce- ment learning,
J. Liang, V . Makoviychuk, A. Handa, N. Chentanez, M. Macklin, and D. Fox, “Gpu-accelerated robotic simulation for distributed reinforce- ment learning,” inConference on Robot Learning (CoRL), 2018
work page 2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.