Recognition: 2 theorem links
· Lean TheoremDelay-Robust Secondary Frequency Control via Passive Interconnection and Randomized Block Updates
Pith reviewed 2026-05-12 03:46 UTC · model grok-4.3
The pith
A passivity-based controller with randomized updates solves constrained economic dispatch while restoring nominal frequency despite communication delays.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The augmented projected primal-dual controller, when interconnected through scattering-based passive channels, restores nominal frequency and drives the closed-loop system to the solution set of the constrained economic dispatch problem. The same equilibrium is preserved under two-way delays. The randomized block-coordinate implementation of the controller yields a sampled-data closed loop that retains the target solution set and attains local mean-square geometric convergence when suitable step sizes and regularity conditions hold. The multivariable wave-domain interface filter injects extra dissipation at the delayed interface without altering the steady-state interconnection.
What carries the argument
Augmented projected primal-dual controller interconnected via scattering-based passive channels for two-way delays, together with randomized block-coordinate updates and a wave-domain interface filter.
If this is right
- The closed-loop system restores nominal frequency in the presence of two-way communication delays.
- The system reaches the solution set of the constrained economic dispatch problem that incorporates capacity limits, nodal balance, flow limits, and scheduled tie-line exchanges.
- The target equilibrium remains exactly the same after the delays are introduced through the passive-channel model.
- The randomized block-coordinate sampled-data implementation achieves local mean-square geometric convergence under suitable step-size and regularity conditions.
- The wave-domain filter improves damping of the delayed interface without changing the steady-state behavior.
Where Pith is reading between the lines
- The passive-channel modeling technique may simplify stability arguments in other optimization-based controllers that must operate over delayed links.
- Randomized block updates offer a practical route to scale the method to larger networks where full primal-dual updates per step become prohibitive.
- The equilibrium-preservation property under passive interconnections could be tested on problems with additional imperfections such as quantization or packet loss.
Load-bearing premise
Communication delays can be modeled as scattering-based passive channels that leave the target economic-dispatch equilibrium and the passivity property of the interconnection unchanged.
What would settle it
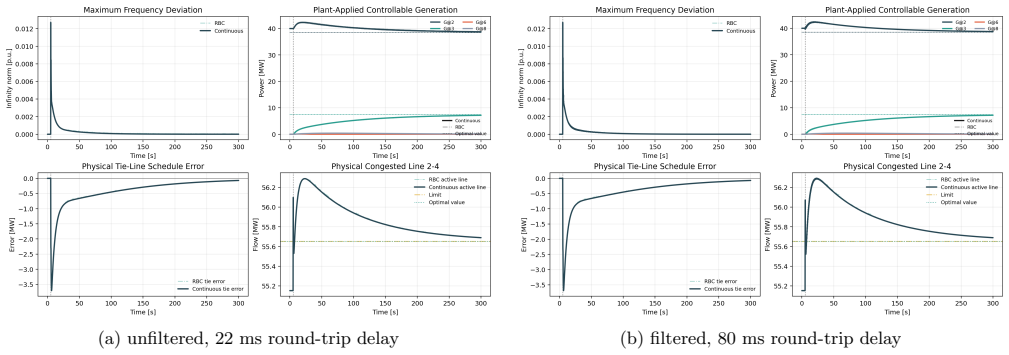
On the IEEE 14-bus test system, run the proposed randomized controller with realistic two-way delays and observe whether frequency returns to nominal and whether the system converges to the constrained economic-dispatch solution; persistent deviation or divergence would contradict the claims.
Figures

read the original abstract
This paper studies secondary frequency control in transmission networks subject to communication delays at the cyber-physical interface and limited per-update computation at the control center. The regulation objective is formulated as a constrained economic dispatch problem incorporating generation capacity constraints, nodal power balance, transmission-flow limits, and scheduled tie-line power exchanges. Based on this formulation, we develop a passivity-based control framework in which an augmented projected primal-dual controller restores nominal frequency and drives the closed-loop system to the solution set of the constrained economic dispatch problem. Two-way communication delays between the physical network and the control center are modeled as scattering-based passive channels for the measurement uplink and the control-command downlink. This construction preserves the target equilibrium and enables a delay-robust passivity analysis of the delayed closed loop. To reduce the computational burden at the control center, we develop a randomized block-coordinate implementation of the augmented projected primal-dual controller. The resulting sampled-data closed loop preserves the target solution set and achieves local mean-square geometric convergence under suitable step-size and regularity conditions. Finally, a multivariable wave-domain interface filter is introduced to inject additional dissipation and improve the damping of the delayed interface without altering the steady-state interconnection. Simulations on the IEEE 14-bus system indicate that the proposed digital implementation accurately reproduces the delayed closed-loop behavior while reducing the per-update computational cost.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper develops a passivity-based secondary frequency control framework for transmission networks subject to communication delays and limited control-center computation. The regulation task is cast as a constrained economic dispatch problem (with capacity limits, power balance, flow limits, and tie-line schedules). An augmented projected primal-dual controller is proposed that restores nominal frequency and drives the closed loop to the dispatch solution set. Two-way delays are represented as scattering-based passive channels that preserve the target equilibrium, enabling a delay-robust passivity analysis. A randomized block-coordinate sampled-data implementation reduces per-update computation while retaining the equilibrium set and achieving local mean-square geometric convergence under suitable step-size and regularity conditions. A multivariable wave-domain interface filter is added to increase damping without changing the steady-state map. The claims are illustrated on the IEEE 14-bus system.
Significance. If the central claims hold, the work supplies a theoretically grounded method for delay-robust and computationally light secondary frequency control that integrates passivity, projected primal-dual dynamics, and stochastic approximation. The explicit preservation of the economic-dispatch equilibrium under passive delay channels and the mean-square convergence guarantee for the randomized implementation would be useful additions to the literature on cyber-physical power-system control.
major comments (3)
- [Delay Modeling and Passivity Analysis] The preservation of the target equilibrium under the scattering-based delay channels is load-bearing for the delay-robust claim. The manuscript should provide an explicit equilibrium analysis (likely in the section following the controller design) showing that the scattering parameters leave the solution set of the constrained economic dispatch unchanged.
- [Randomized Block-Coordinate Implementation] The local mean-square geometric convergence of the randomized block implementation is asserted under 'suitable step-size and regularity conditions.' The convergence theorem (presumably in the sampled-data section) must state the explicit step-size bound and the precise regularity assumptions (e.g., strong convexity, Lipschitz constants, or bounded delays) so that the result can be verified.
- [Numerical Simulations] The IEEE 14-bus simulations are cited as supporting evidence, yet the manuscript provides no quantitative comparison of convergence rate, per-update flop count, or robustness margins against a non-randomized baseline or against varying delay values. Without these metrics the practical advantage of the randomized implementation remains unquantified.
minor comments (2)
- [Abstract] The abstract is information-dense; separating the four main contributions (controller, delay model, randomization, filter) into distinct sentences would improve readability.
- Notation for the augmented primal-dual variables and the scattering operators should be introduced with a compact table or list of symbols to aid the reader.
Simulated Author's Rebuttal
We thank the referee for the thorough and constructive review. We address each of the major comments point by point below, indicating the revisions we plan to incorporate.
read point-by-point responses
-
Referee: [Delay Modeling and Passivity Analysis] The preservation of the target equilibrium under the scattering-based delay channels is load-bearing for the delay-robust claim. The manuscript should provide an explicit equilibrium analysis (likely in the section following the controller design) showing that the scattering parameters leave the solution set of the constrained economic dispatch unchanged.
Authors: We agree with the referee that an explicit equilibrium analysis would strengthen the presentation. Although the abstract and controller design section state that the scattering-based channels preserve the target equilibrium, we will add a new subsection (e.g., Section III-C) that provides the detailed algebraic derivation showing that the equilibrium set of the constrained economic dispatch problem remains invariant under the passive delay model. This will include the fixed-point equations for the augmented primal-dual variables and confirmation that the scattering parameters do not shift the solution set. revision: yes
-
Referee: [Randomized Block-Coordinate Implementation] The local mean-square geometric convergence of the randomized block implementation is asserted under 'suitable step-size and regularity conditions.' The convergence theorem (presumably in the sampled-data section) must state the explicit step-size bound and the precise regularity assumptions (e.g., strong convexity, Lipschitz constants, or bounded delays) so that the result can be verified.
Authors: The convergence result is stated in Theorem 2 of the sampled-data section. To make it verifiable, we will revise the theorem to explicitly specify the step-size bound (0 < γ < 2 / (L + σ), where L is the Lipschitz constant and σ relates to the strong convexity parameter) and list the regularity assumptions: (i) strong convexity of the economic dispatch objective, (ii) Lipschitz continuity of the gradients, (iii) bounded communication delays, and (iv) the block selection probabilities satisfying a minimum probability condition. A corollary will be added for the IEEE 14-bus parameters. revision: yes
-
Referee: [Numerical Simulations] The IEEE 14-bus simulations are cited as supporting evidence, yet the manuscript provides no quantitative comparison of convergence rate, per-update flop count, or robustness margins against a non-randomized baseline or against varying delay values. Without these metrics the practical advantage of the randomized implementation remains unquantified.
Authors: We acknowledge that the simulation results in Section V primarily demonstrate qualitative agreement with the theoretical predictions and the reduction in computational load. In the revised version, we will include additional quantitative comparisons: (1) convergence rate plots and tables for randomized vs. full-update implementations, (2) per-update flop counts with explicit numbers, and (3) robustness margins showing mean-square error and settling time for different delay bounds (e.g., 10ms to 100ms). These will be presented in new figures and a table. revision: yes
Circularity Check
No significant circularity detected
full rationale
The paper's derivation is self-contained and relies on independent constructions: an augmented projected primal-dual controller is explicitly designed from the constrained economic dispatch formulation using standard passivity and projected dynamics; delays are modeled as scattering-based passive channels, a deliberate choice that preserves equilibrium by the scattering property rather than tautologically assuming the result; the randomized block-coordinate sampled-data implementation is shown to preserve the solution set and converge locally in mean-square sense under explicitly stated step-size and regularity conditions via stochastic approximation arguments. No load-bearing self-citations, fitted inputs renamed as predictions, or ansatzes smuggled via prior work appear. IEEE 14-bus simulations supply external numerical support outside the analytic chain.
Axiom & Free-Parameter Ledger
free parameters (1)
- step-size
axioms (2)
- domain assumption Communication delays between physical network and control center can be modeled as scattering-based passive channels
- domain assumption The system satisfies regularity conditions required for convergence
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclearTwo-way communication delays ... modeled as scattering-based passive channels ... lossless passive ... augmented projected primal-dual controller ... local mean-square geometric convergence
Reference graph
Works this paper leans on
-
[1]
Paul M. Anderson and A. A. Fouad.Power System Control and Stability. IEEE, 2002
work page 2002
-
[2]
Enrique Mallada, Changhong Zhao, and Steven Low. Optimal Load-Side Control for Frequency Regulation in Smart Grids.IEEE Transactions on Automatic Control, 62(12):6294–6309, December 2017
work page 2017
-
[3]
Na Li, Changhong Zhao, and Lijun Chen. Connecting automatic generation control and economic dispatch from an optimization view.IEEE Transactions on Control of Network Systems, 3(3):254–264, 2015
work page 2015
-
[4]
A real-time control framework for smart power networks with star topology
Xuan Zhang and Antonis Papachristodoulou. A real-time control framework for smart power networks with star topology. In2013 American Control Conference, pages 5062–
-
[5]
Kaihua Xi, Johan LA Dubbeldam, Hai Xiang Lin, and Jan H van Schuppen. Power-imbalance allocation control of power systems-secondary frequency control.Automatica, 92:72–85, 2018
work page 2018
-
[6]
Erieke Weitenberg, Claudio De Persis, and Nima Monshizadeh. Exponential convergence under distributed averaging integral frequency control.Automatica, 98:103– 113, December 2018
work page 2018
-
[7]
Low, Changhong Zhao, and Shengwei Mei
Zhaojian Wang, Feng Liu, Steven H. Low, Changhong Zhao, and Shengwei Mei. Distributed Frequency Control With Operational Constraints, Part I: Per-Node Power Balance. IEEE Transactions on Smart Grid, 10(1):40–52, January 2019
work page 2019
-
[8]
Luwei Yang, Tao Liu, Zhiyuan Tang, and David J Hill. Distributed optimal generation and load-side control for frequency regulation in power systems.IEEE Transactions on Automatic Control, 66(6):2724–2731, 2020
work page 2020
-
[9]
Gather-and- broadcast frequency control in power systems.Automatica, 79:296–305, 2017
Florian D¨ orfler and Sergio Grammatico. Gather-and- broadcast frequency control in power systems.Automatica, 79:296–305, 2017
work page 2017
-
[10]
Optimization algorithms as robust feedback controllers.Annual Reviews in Control, 57:100941, 2024
Adrian Hauswirth, Zhiyu He, Saverio Bolognani, Gabriela Hug, and Florian D¨ orfler. Optimization algorithms as robust feedback controllers.Annual Reviews in Control, 57:100941, 2024
work page 2024
-
[11]
Changhong Zhao, Ufuk Topcu, Na Li, and Steven Low. Design and Stability of Load-Side Primary Frequency Control in Power Systems.IEEE Transactions on Automatic Control, 59(5):1177–1189, May 2014
work page 2014
-
[12]
Xiaofeng Yu and Kevin Tomsovic. Application of linear matrix inequalities for load frequency control with communication delays.IEEE Transactions on Power Systems, 19(3):1508–1515, August 2004
work page 2004
-
[13]
Lin Jiang, Wen Yao, Q. H. Wu, J. Y. Wen, and S. J. Cheng. Delay-dependent stability for load frequency control with constant and time-varying delays.IEEE Transactions on Power Systems, 27(2):932–941, May 2012
work page 2012
-
[14]
Fang Zhang, Yuanzhang Sun, Lin Cheng, Xiong Li, Joe H. Chow, and Weixing Zhao. Measurement and modeling of delays in wide-area closed-loop control systems.IEEE Transactions on Power Systems, 30(5):2426–2433, September 2015. 12
work page 2015
-
[15]
Yurii Nesterov. Efficiency of coordinate descent methods on huge-scale optimization problems.SIAM Journal on Optimization, 22(2):341–362, 2012
work page 2012
-
[16]
Peter Richt´ arik and Martin Tak´ aˇ c. Iteration complexity of randomized block-coordinate descent methods for minimizing a composite function.Mathematical Programming, 144(1- 2):1–38, 2014
work page 2014
-
[17]
Ji Liu and Stephen J. Wright. Asynchronous stochastic coordinate descent: Parallelism and convergence properties. SIAM Journal on Optimization, 25(1):351–376, 2015
work page 2015
-
[18]
Yuchen Zhang and Lin Xiao. Stochastic primal- dual coordinate method for regularized empirical risk minimization.Journal of Machine Learning Research, 18(84):1–42, 2017
work page 2017
-
[19]
Global stability with time-delay of a primal-dual congestion control
Zhikui Wang and Fernando Paganini. Global stability with time-delay of a primal-dual congestion control. InProceedings of the 42nd IEEE Conference on Decision and Control, pages 3671–3676, 2003
work page 2003
-
[20]
Deming Yuan, Daniel W. C. Ho, and Shengyuan Xu. Regularized primal-dual subgradient method for distributed constrained optimization.IEEE Transactions on Cybernetics, 46(9):2109–2118, 2016
work page 2016
-
[21]
Hale, Angelia Nedi´ c, and Magnus Egerstedt
Matthew T. Hale, Angelia Nedi´ c, and Magnus Egerstedt. Asynchronous multiagent primal-dual optimization.IEEE Transactions on Automatic Control, 62(9):4421–4435, 2017
work page 2017
-
[22]
Smart grid optimization through asynchronous, distributed primal dual iterations
Benjamin Millar and Danchi Jiang. Smart grid optimization through asynchronous, distributed primal dual iterations. IEEE Transactions on Smart Grid, 8(5):2324–2331, 2017
work page 2017
-
[23]
Katherine R. Hendrickson and Matthew T. Hale. Totally asynchronous primal-dual convex optimization in blocks. IEEE Transactions on Control of Network Systems, 10(1):454–466, 2023
work page 2023
-
[24]
Yanxu Su, Qingling Wang, and Changyin Sun. Primal- dual fixed point algorithms based on adapted metric for distributed optimization with bounded communication delays.IEEE Transactions on Automatic Control, 70(4):2212–2227, 2025
work page 2025
-
[25]
Machado, G¨ ulay¨Oke G¨ unel, and Johannes Schiffer
G¨ ok¸ cen Devlet S ¸en, Juan E. Machado, G¨ ulay¨Oke G¨ unel, and Johannes Schiffer. Delay-robust primal-dual dynamics for distributed optimization.arXiv preprint arXiv:2603.18236, 2026
-
[26]
Adrian Hauswirth, Saverio Bolognani, Gabriela Hug, and Florian D¨ orfler. Timescale separation in autonomous optimization.IEEE Transactions on Automatic Control, 66(2):611–624, 2021
work page 2021
-
[27]
Zhiyu He, Saverio Bolognani, Jianping He, Florian D¨ orfler, and Xinping Guan. Model-free nonlinear feedback optimization.IEEE Transactions on Automatic Control, 69(7):4554–4569, 2024
work page 2024
-
[28]
Freris, and Panagiotis Patrinos
Puya Latafat, Nikolaos M. Freris, and Panagiotis Patrinos. A new randomized block-coordinate primal-dual proximal algorithm for distributed optimization.IEEE Transactions on Automatic Control, 64(10):4050–4065, 2019
work page 2019
-
[29]
Han Zhang, Jieqiang Wei, Peng Yi, and Xiaoming Hu. Projected primal–dual gradient flow of augmented lagrangian with application to distributed maximization of the algebraic connectivity of a network.Automatica, 98:34–41, 2018
work page 2018
-
[30]
Heinz H. Bauschke and Patrick L. Combettes.Convex Analysis and Monotone Operator Theory in Hilbert Spaces. Springer, Cham, 2 edition, 2017
work page 2017
-
[31]
Sebastian Trip and Claudio De Persis. Distributed optimal load frequency control with non-passive dynamics.IEEE Transactions on Control of Network Systems, 5(3):1232– 1244, 2018
work page 2018
-
[32]
Stephen Frank and Steffen Rebennack. An introduction to optimal power flow: Theory, formulation, and examples.IIE Transactions, 48(12):1172–1197, 2016
work page 2016
-
[33]
Ray Daniel Zimmerman, Carlos Edmundo Murillo-Sanchez, and Robert John Thomas. MATPOWER: Steady-State Operations, Planning, and Analysis Tools for Power Systems Research and Education.IEEE Transactions on Power Systems, 26(1):12–19, February 2011
work page 2011
-
[34]
Florian D¨ orfler and Francesco Bullo. Kron reduction of graphs with applications to electrical networks.IEEE Transactions on Circuits and Systems I: Regular Papers, 60(1):150–163, 2013
work page 2013
-
[35]
Mengmou Li, Jeremy Watson, and Ioannis Lestas. Distributed optimal secondary frequency control in power networks with delay independent stability.IEEE Transactions on Automatic Control, 69(6):3748–3763, 2024
work page 2024
-
[36]
Ahmed Allibhoy and Jorge Cort´ es. Control-barrier-function- based design of gradient flows for constrained nonlinear programming.IEEE Transactions on Automatic Control, 69(6):3499–3514, 2023
work page 2023
-
[37]
Luwei Yang, Xiemin Mo, Tao Liu, and David J Hill. Distributed multi-time slot power balancing control of power systems with energy storage devices.Automatica, 183:112640, 2026
work page 2026
-
[38]
Risks and mitigations for losing ems functions reference document
North American Electric Reliability Corporation. Risks and mitigations for losing ems functions reference document. Technical report, NERC, September 2024
work page 2024
-
[39]
Balancing and frequency control: A technical document prepared by the nerc resources subcommittee
North American Electric Reliability Corporation. Balancing and frequency control: A technical document prepared by the nerc resources subcommittee. Technical report, NERC, May 2021
work page 2021
-
[40]
PJM Interconnection, L.L.C.PJM Manual 01: Control Center and Data Exchange Requirements. PJM Interconnection, May 2025. Revision 50
work page 2025
-
[41]
Low, Changhong Zhao, and Shengwei Mei
Zhaojian Wang, Feng Liu, Steven H. Low, Changhong Zhao, and Shengwei Mei. Distributed frequency control with operational constraints, part i: Per-node power balance. IEEE Transactions on Smart Grid, 10(1):40–52, 2019
work page 2019
-
[42]
Guangyuan Zhang, James McCalley, and Qin Wang. An agc dynamics-constrained economic dispatch model.IEEE Transactions on Power Systems, 34(5):3931–3940, 2019
work page 2019
-
[43]
Yiling Zhang, Siqian Shen, and Johanna L. Mathieu. Distributionally robust chance-constrained optimal power flow with uncertain renewables and uncertain reserves provided by loads.IEEE Transactions on Power Systems, 32(2):1378–1388, 2017
work page 2017
-
[44]
Xia Jiang, Xianlin Zeng, Lihua Xie, Jian Sun, and Jie Chen. Distributed stochastic projection-free algorithm for constrained optimization.IEEE Transactions on Automatic Control, 70(4):2479–2494, 2025
work page 2025
-
[45]
Hoi-To Wai, Jean Lafond, Anna Scaglione, and Eric Moulines. Decentralized frank–wolfe algorithm for convex and nonconvex problems.IEEE Transactions on Automatic Control, 62(11):5522–5537, 2017
work page 2017
-
[46]
Rodolphe Sepulchre and Guy-Bart Stan. Feedback mechanisms for global oscillations in Lur’e systems.Systems & Control Letters, 54(8):809–818, 2005
work page 2005
-
[47]
Hassan K. Khalil.Nonlinear Systems. Prentice Hall, Upper Saddle River, NJ, 3 edition, 2002
work page 2002
-
[48]
Ray D. Zimmerman and Carlos E. Murillo-Sanchez. MATPOWER User’s Manual, 2025. [Online]. Available: https://matpower.org/docs/MATPOWER-manual.pdf. 13
work page 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.