Recognition: no theorem link
When Does Non-Uniform Replay Matter in Reinforcement Learning?
Pith reviewed 2026-05-13 06:22 UTC · model grok-4.3
The pith
Non-uniform replay improves reinforcement learning sample efficiency mainly when replay volume is low, provided sampling entropy stays high.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
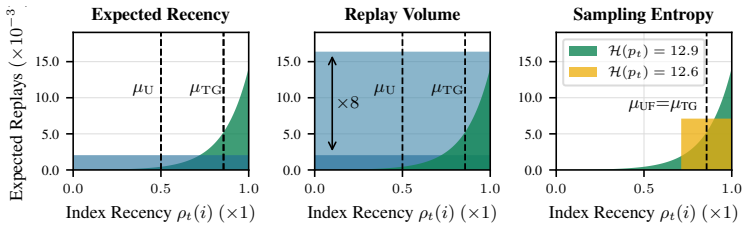
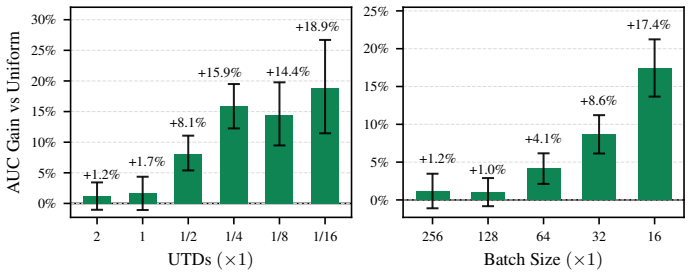
The central claim is that non-uniform replay effectiveness is governed by replay volume, expected recency, and sampling-distribution entropy. Non-uniform methods deliver the clearest gains precisely when replay volume is low; high-entropy sampling remains valuable even when expected recency is held constant. A Truncated Geometric distribution that biases toward recent transitions while preserving entropy therefore raises sample efficiency in low-volume regimes, stays competitive at high volume, and adds negligible overhead across parallel, single-task, and multi-task settings.
What carries the argument
The three factors—replay volume, expected recency, and entropy of the replay sampling distribution—that together determine when non-uniform replay outperforms uniform sampling.
If this is right
- Non-uniform replay yields its largest sample-efficiency gains precisely when replay volume is low.
- High-entropy sampling distributions remain important even when expected recency is comparable to lower-entropy alternatives.
- A Truncated Geometric replay distribution improves efficiency in low-volume regimes while adding negligible computation.
- The same replay strategy stays competitive with uniform sampling once replay volume becomes high.
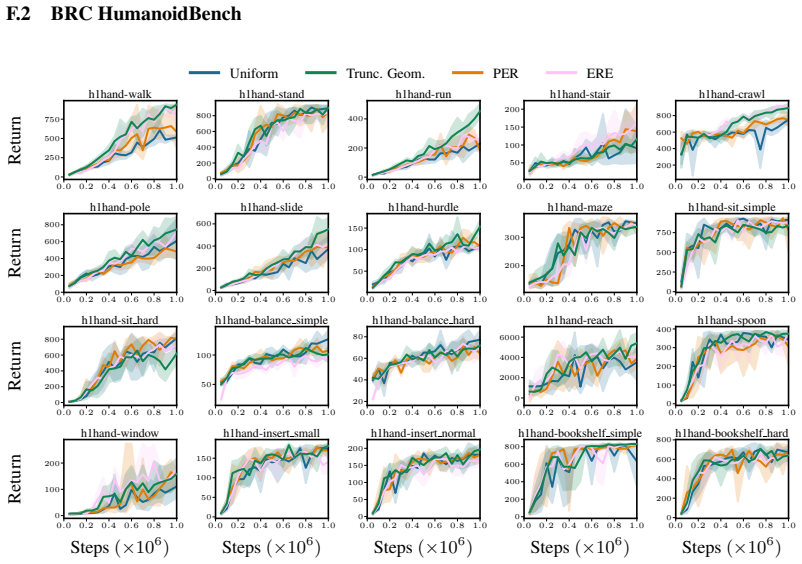
- The pattern holds across large-scale parallel simulation, single-task, and multi-task regimes with three modern algorithms.
Where Pith is reading between the lines
- Designers of memory-constrained agents could default to high-entropy recent-biased replay rather than uniform sampling.
- The three-factor account may help predict when other prioritization schemes, such as TD-error weighting, will add value or interfere.
- Varying replay volume deliberately during training could serve as a practical lever for trading off sample efficiency against wall-clock speed.
Load-bearing premise
That the three factors fully account for non-uniform replay performance and that the observed pattern generalizes beyond the tested algorithms, benchmarks, and parallel-simulation setups.
What would settle it
A controlled experiment in which non-uniform replay with low entropy outperforms high-entropy sampling at matched expected recency, or in which gains appear or grow at high replay volumes, would falsify the central claim.
Figures


















read the original abstract
Modern off-policy reinforcement learning algorithms often rely on simple uniform replay sampling and it remains unclear when and why non-uniform replay improves over this strong baseline. Across diverse RL settings, we show that the effectiveness of non-uniform replay is governed by three factors: replay volume, the number of replayed transitions per environment step; expected recency, how recent sampled transitions are; and the entropy of the replay sampling distribution. Our main contribution is clarifying when non-uniform replay is beneficial and providing practical guidance for replay design in modern off-policy RL. Namely, we find that non-uniform replay is most beneficial when replay volume is low, and that high-entropy sampling is important even at comparable expected recency. Motivated by these findings, we adopt a simple Truncated Geometric replay that biases sampling toward recent experience while preserving high entropy and incurring negligible computational overhead. Across large-scale parallel simulation, single-task, and multi-task settings, including three modern algorithms evaluated on five RL benchmark suites, this replay sampling strategy improves sample efficiency in low-volume regimes while remaining competitive when replay volume is high.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that non-uniform replay sampling in off-policy RL is governed by three factors—replay volume (replayed transitions per environment step), expected recency of sampled transitions, and entropy of the sampling distribution—and demonstrates empirically that non-uniform methods are most beneficial at low replay volumes while high-entropy sampling remains important even at comparable recency. It proposes a simple Truncated Geometric replay buffer that biases toward recent experience while preserving entropy and low overhead, showing improved sample efficiency in low-volume regimes across large-scale parallel simulation, single-task, and multi-task settings with three algorithms on five benchmarks.
Significance. If the empirical patterns hold, the work supplies actionable guidance for replay design in modern off-policy RL, especially in resource-constrained or parallel-simulation regimes where replay volume is limited. The identification of the three factors and the low-overhead Truncated Geometric construction are practical strengths; the breadth of evaluation across algorithms and benchmarks strengthens the case for generalizability within the tested regimes.
major comments (2)
- [§4.3 and §5.1] §4.3 and §5.1: the central claim that the three factors 'govern' effectiveness rests on comparative experiments, yet no ablation is presented that holds replay volume and expected recency fixed while independently varying entropy (or vice versa); without this, it remains possible that observed benefits are driven by unmeasured interactions such as alignment with the policy-induced state-visitation distribution or TD-error variance rather than the three factors alone.
- [Table 3 and Figure 4] Table 3 and Figure 4: the reported gains for Truncated Geometric sampling in low-volume regimes are shown without accompanying statistical tests, number of independent seeds, or confidence intervals; this weakens the ability to judge whether the improvements are robust or could be explained by run-to-run variance.
minor comments (2)
- [§3.2] §3.2: the precise mathematical definitions of 'expected recency' and 'entropy of the replay sampling distribution' would benefit from explicit equations rather than prose descriptions to ensure reproducibility.
- [Figure 2] Figure 2: axis labels and legends are occasionally ambiguous regarding whether curves correspond to uniform versus non-uniform sampling; adding explicit annotations would improve clarity.
Simulated Author's Rebuttal
We thank the referee for their constructive and detailed feedback. We address each major comment below and have revised the manuscript to strengthen the empirical support and statistical reporting.
read point-by-point responses
-
Referee: [§4.3 and §5.1] §4.3 and §5.1: the central claim that the three factors 'govern' effectiveness rests on comparative experiments, yet no ablation is presented that holds replay volume and expected recency fixed while independently varying entropy (or vice versa); without this, it remains possible that observed benefits are driven by unmeasured interactions such as alignment with the policy-induced state-visitation distribution or TD-error variance rather than the three factors alone.
Authors: We appreciate this point on isolating the factors. Our experiments in §4.3 and §5.1 compare sampling distributions (uniform, prioritized, geometric) that differ systematically in entropy while matching or controlling volume and recency through buffer size and decay parameters. These comparisons across algorithms and benchmarks support the role of the three factors. We acknowledge that a fully isolated ablation would provide stronger causal evidence. In the revised manuscript we have added an explicit ablation that constructs sampling distributions with matched replay volume and expected recency but varying entropy levels, confirming that higher entropy yields better sample efficiency. We also added a brief discussion of possible interactions with state-visitation distributions and TD-error variance. revision: yes
-
Referee: [Table 3 and Figure 4] Table 3 and Figure 4: the reported gains for Truncated Geometric sampling in low-volume regimes are shown without accompanying statistical tests, number of independent seeds, or confidence intervals; this weakens the ability to judge whether the improvements are robust or could be explained by run-to-run variance.
Authors: We agree that statistical details are necessary for assessing robustness. In the revised manuscript we now report that all results use 10 independent random seeds, include standard-error confidence intervals as error bars in Figure 4, and add paired t-test p-values in Table 3. These additions show that the reported gains for Truncated Geometric sampling in low-volume regimes are statistically significant (p < 0.05) relative to uniform sampling. revision: yes
Circularity Check
No circularity: purely empirical identification of replay factors
full rationale
The paper's central contribution consists of experimental measurements across parallel simulation, single-task, and multi-task regimes with three algorithms and five benchmarks. It identifies replay volume, expected recency, and sampling entropy as governing factors through direct observation of performance differences, without any derivation, uniqueness theorem, or fitted parameter that is then renamed as a prediction. The Truncated Geometric sampler is introduced as a practical choice motivated by the observed patterns rather than derived from them by construction. No self-citation chain or ansatz smuggling appears in the load-bearing steps; the claims remain falsifiable against the reported runs and do not reduce to their own inputs.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Modern off-policy RL algorithms rely on experience replay buffers.
Reference graph
Works this paper leans on
-
[1]
Rishabh Agarwal, Max Schwarzer, Pablo Samuel Castro, Aaron Courville, and Marc G Belle- mare. Deep reinforcement learning at the edge of the statistical precipice.Advances in Neural Information Processing Systems, 2021
work page 2021
-
[2]
What matters for simulation to online reinforcement learning on real robots
Yarden As, Dhruva Tirumala, René Zurbrügg, Chenhao Li, Stelian Coros, Andreas Krause, and Markus Wulfmeier. What matters for simulation to online reinforcement learning on real robots. arXiv preprint arXiv:2602.20220, 2026
-
[3]
Distributed distributional deterministic policy gradients
Gabriel Barth-Maron, Matthew W Hoffman, David Budden, Will Dabney, Dan Horgan, TB Dhruva, Alistair Muldal, Nicolas Heess, and Timothy Lillicrap. Distributed distributional deterministic policy gradients. InInternational Conference on Learning Representations, 2018
work page 2018
-
[4]
Aditya Bhatt, Daniel Palenicek, Boris Belousov, Max Argus, Artemij Amiranashvili, Thomas Brox, and Jan Peters. CrossQ: Batch normalization in deep reinforcement learning for greater sample efficiency and simplicity. InInternational conference on learning representations (ICLR), 2024
work page 2024
-
[5]
Vittorio Caggiano, Huawei Wang, Guillaume Durandau, Massimo Sartori, and Vikash Kumar. Myosuite–a contact-rich simulation suite for musculoskeletal motor control.arXiv preprint arXiv:2205.13600, 2022
-
[6]
Thomas M Cover.Elements of information theory. John Wiley & Sons, 1999
work page 1999
-
[7]
Sample-efficient reinforcement learning by breaking the replay ratio barrier
Pierluca D’Oro, Max Schwarzer, Evgenii Nikishin, Pierre-Luc Bacon, Marc G Bellemare, and Aaron Courville. Sample-efficient reinforcement learning by breaking the replay ratio barrier. InThe Eleventh International Conference on Learning Representations, 2022
work page 2022
-
[8]
Compute-optimal scaling for value-based deep rl, 2025
Preston Fu, Oleh Rybkin, Zhiyuan Zhou, Michal Nauman, Pieter Abbeel, Sergey Levine, and Aviral Kumar. Compute-optimal scaling for value-based deep rl, 2025. URL https: //arxiv.org/abs/2508.14881
-
[9]
Addressing function approximation error in actor-critic methods
Scott Fujimoto, Herke Hoof, and David Meger. Addressing function approximation error in actor-critic methods. InInternational conference on machine learning, 2018
work page 2018
-
[10]
Towards general-purpose model-free reinforcement learning.arXiv preprint arXiv:2501.16142, 2025
Scott Fujimoto, Pierluca D’Oro, Amy Zhang, Yuandong Tian, and Michael Rabbat. Towards general-purpose model-free reinforcement learning.arXiv preprint arXiv:2501.16142, 2025
-
[11]
Soft actor-critic: Off- policy maximum entropy deep reinforcement learning with a stochastic actor
Tuomas Haarnoja, Aurick Zhou, Pieter Abbeel, and Sergey Levine. Soft actor-critic: Off- policy maximum entropy deep reinforcement learning with a stochastic actor. InInternational conference on machine learning, 2018
work page 2018
-
[12]
Dream to control: Learning behaviors by latent imagination
Danijar Hafner, Timothy Lillicrap, Jimmy Ba, and Mohammad Norouzi. Dream to control: Learning behaviors by latent imagination. InInternational Conference on Learning Representa- tions, 2019
work page 2019
-
[13]
Array programming with numpy.Nature, 585(7825):357–362, 2020
Charles R Harris, K Jarrod Millman, Stéfan J Van Der Walt, Ralf Gommers, Pauli Virtanen, David Cournapeau, Eric Wieser, Julian Taylor, Sebastian Berg, Nathaniel J Smith, et al. Array programming with numpy.Nature, 585(7825):357–362, 2020
work page 2020
-
[14]
Rainbow: Combining improvements in deep reinforcement learning
Matteo Hessel, Joseph Modayil, Hado Van Hasselt, Tom Schaul, Georg Ostrovski, Will Dab- ney, Dan Horgan, Bilal Piot, Mohammad Azar, and David Silver. Rainbow: Combining improvements in deep reinforcement learning. InThirty-Second AAAI Conference on Artificial Intelligence, 2018
work page 2018
-
[15]
Information theory and statistical mechanics.Physical review, 106(4):620, 1957
Edwin T Jaynes. Information theory and statistical mechanics.Physical review, 106(4):620, 1957
work page 1957
-
[16]
Hojoon Lee, Dongyoon Hwang, Donghu Kim, Hyunseung Kim, Jun Jet Tai, Kaushik Subrama- nian, Peter R Wurman, Jaegul Choo, Peter Stone, and Takuma Seno. Simba: Simplicity bias for scaling up parameters in deep reinforcement learning.arXiv preprint arXiv:2410.09754, 2024. 11
-
[18]
Hojoon Lee, Youngdo Lee, Takuma Seno, Donghu Kim, Peter Stone, and Jaegul Choo. Hyperspherical normalization for scalable deep reinforcement learning.arXiv preprint arXiv:2502.15280, 2025
-
[19]
Timothy P. Lillicrap, Jonathan J. Hunt, Alexander Pritzel, Nicolas Heess, Tom Erez, Yuval Tassa, David Silver, and Daan Wierstra. Continuous control with deep reinforcement learning. International Conference on Learning Representations (ICLR), 2015
work page 2015
-
[20]
Isaac Lab: A GPU-Accelerated Simulation Framework for Multi-Modal Robot Learning
Mayank Mittal, Pascal Roth, James Tigue, Antoine Richard, Octi Zhang, Peter Du, Anto- nio Serrano-Muñoz, Xinjie Yao, René Zurbrügg, Nikita Rudin, Lukasz Wawrzyniak, Milad Rakhsha, Alain Denzler, Eric Heiden, Ales Borovicka, Ossama Ahmed, Iretiayo Akinola, Abrar Anwar, Mark T. Carlson, Ji Yuan Feng, Animesh Garg, Renato Gasoto, Lionel Gulich, Yijie Guo, M....
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[21]
V olodymyr Mnih, Koray Kavukcuoglu, David Silver, Andrei A. Rusu, Joel Veness, Marc G. Bellemare, Alex Graves, Martin Riedmiller, Andreas K. Fidjeland, Georg Ostrovski, Stig Pe- tersen, Charles Beattie, Amir Sadik, Ioannis Antonoglou, Helen King, Dharshan Kumaran, Daan Wierstra, Shane Legg, and Demis Hassabis. Human-level control through deep reinforcemen...
-
[22]
Bigger, regularized, optimistic: scaling for compute and sample efficient continuous control
Michal Nauman, Mateusz Ostaszewski, Krzysztof Jankowski, Piotr Miło´s, and Marek Cygan. Bigger, regularized, optimistic: scaling for compute and sample efficient continuous control. Advances in neural information processing systems, 2024
work page 2024
-
[23]
Nauman, M., Ostaszewski, M., Jankowski, K., Miło ´s, P., and Cygan, M
Michal Nauman, Marek Cygan, Carmelo Sferrazza, Aviral Kumar, and Pieter Abbeel. Bigger, regularized, categorical: High-capacity value functions are efficient multi-task learners.arXiv preprint arXiv:2505.23150, 2025
-
[24]
Daniel Palenicek, Florian V ogt, Joe Watson, Ingmar Posner, and Jan Peters. Xqc: Well-conditioned optimization accelerates deep reinforcement learning.arXiv preprint arXiv:2509.25174, 2025
-
[25]
Pleiss, Tobias Sutter, and Maximilian Schiffer
Leonard S. Pleiss, Tobias Sutter, and Maximilian Schiffer. Reliability-adjusted prioritized experience replay, 2025. URLhttps://arxiv.org/abs/2506.18482
-
[26]
Martin L Puterman.Markov Decision Processes: Discrete Stochastic Dynamic Programming. John Wiley & Sons, Inc., 1994
work page 1994
-
[27]
Value-based deep rl scales predictably.arXiv preprint arXiv:2502.04327, 2025
Oleh Rybkin, Michal Nauman, Preston Fu, Charlie Snell, Pieter Abbeel, Sergey Levine, and Aviral Kumar. Value-based deep rl scales predictably.arXiv preprint arXiv:2502.04327, 2025
-
[28]
Tom Schaul, John Quan, Ioannis Antonoglou, and David Silver. Prioritized experience replay. International Conference on Learning Representations (ICLR), 2015. 12
work page 2015
-
[29]
Prioritized experience replay,
Tom Schaul, John Quan, Ioannis Antonoglou, and David Silver. Prioritized experience replay,
-
[30]
URLhttps://arxiv.org/abs/1511.05952
-
[31]
Learning sim-to-real humanoid locomotion in 15 minutes.arXiv preprint arXiv:2512.01996, 2025
Younggyo Seo, Carmelo Sferrazza, Juyue Chen, Guanya Shi, Rocky Duan, and Pieter Abbeel. Learning sim-to-real humanoid locomotion in 15 minutes.arXiv preprint arXiv:2512.01996, 2025
-
[32]
Younggyo Seo, Carmelo Sferrazza, Haoran Geng, Michal Nauman, Zhao-Heng Yin, and Pieter Abbeel. Fasttd3: Simple, fast, and capable reinforcement learning for humanoid control.arXiv preprint arXiv:2505.22642, 2025
-
[33]
Hu- manoidbench: Simulated humanoid benchmark for whole-body locomotion and manipulation
Carmelo Sferrazza, Dun-Ming Huang, Xingyu Lin, Youngwoon Lee, and Pieter Abbeel. Hu- manoidbench: Simulated humanoid benchmark for whole-body locomotion and manipulation. arXiv preprint arXiv:2403.10506, 2024
-
[34]
Mastering the game of go without human knowledge.nature, 550(7676):354–359, 2017
David Silver, Julian Schrittwieser, Karen Simonyan, Ioannis Antonoglou, Aja Huang, Arthur Guez, Thomas Hubert, Lucas Baker, Matthew Lai, Adrian Bolton, et al. Mastering the game of go without human knowledge.nature, 550(7676):354–359, 2017
work page 2017
-
[35]
Laura Smith, Ilya Kostrikov, and Sergey Levine. A walk in the park: Learning to walk in 20 minutes with model-free reinforcement learning.arXiv preprint arXiv:2208.07860, 2022
-
[36]
Richard S Sutton and Andrew G Barto.Reinforcement learning: An introduction. MIT press, 2018
work page 2018
-
[37]
Yuval Tassa, Yotam Doron, Alistair Muldal, Tom Erez, Yazhe Li, Diego de Las Casas, David Budden, Abbas Abdolmaleki, Josh Merel, Andrew Lefrancq, et al. Deepmind control suite. arXiv preprint arXiv:1801.00690, 2018
work page internal anchor Pith review arXiv 2018
-
[38]
Boosting soft actor-critic: Emphasizing recent experience without forgetting the past, 2019
Che Wang and Keith Ross. Boosting soft actor-critic: Emphasizing recent experience without forgetting the past, 2019. URLhttps://arxiv.org/abs/1906.04009
-
[39]
Che Wang, Yanqiu Wu, Quan Vuong, and Keith Ross. Striving for simplicity and performance in off-policy drl: Output normalization and non-uniform sampling. InInternational Conference on Machine Learning, pp. 10070–10080. PMLR, 2020
work page 2020
-
[40]
Conference on Robot Learning , year=
Tianhe Yu, Deirdre Quillen, Zhanpeng He, Ryan Julian, Karol Hausman, Chelsea Finn, and Sergey Levine. Meta-world: A benchmark and evaluation for multi-task and meta reinforcement learning.CoRR, abs/1910.10897, 2019. URLhttp://arxiv.org/abs/1910.10897. 13 A Limitations Our experiments focus on continuous-control off-policy RL, where replay buffers are cent...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.