Recognition: no theorem link
Diffeomorphic registration distances for Bayesian calibration of infinite-dimensional computer models
Pith reviewed 2026-05-12 05:20 UTC · model grok-4.3
The pith
Distances from the large deformation diffeomorphic metric matching framework can be used to perform Bayesian calibration of infinite-dimensional computer models.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
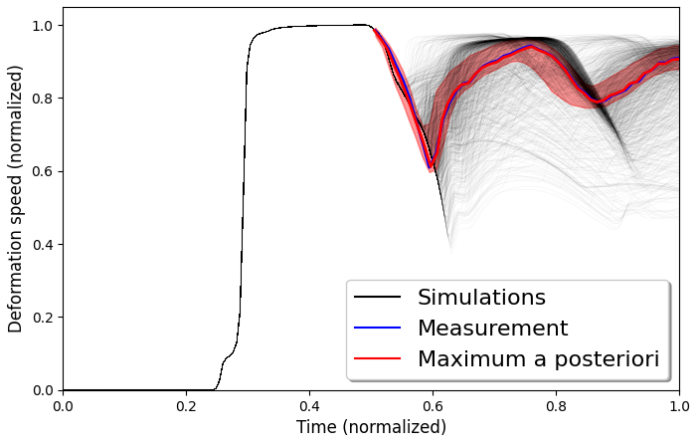
Bayesian calibration is performed using distances from the large deformation diffeomorphic metric matching (LDDMM) framework. LDDMM distances can provide a suitable metric for infinite-dimensional shapes such as scalar fields or function graphs. This metric can be interpreted as the minimal energy deformation required to transform one shape into another. As such, it provides a readily interpretable metric for Bayesian calibration. The representation of the diffeomorphism group as an exponential transformation of an RKHS is compatible with Bayesian inference and allows to define a predictive posterior distribution on the infinite-dimensional space shape.
What carries the argument
LDDMM distances, which quantify the minimal energy deformation between infinite-dimensional shapes by representing the diffeomorphism group as the exponential of a reproducing kernel Hilbert space.
If this is right
- Bayesian calibration yields uncertainty quantification on physical and numerical parameters even when outputs are infinite-dimensional.
- The metric supplies an interpretable deformation-energy basis for comparing model outputs to experimental data.
- A predictive posterior distribution can be defined directly on the infinite-dimensional shape space.
- The framework extends Bayesian methods to complex computer codes whose outputs are scalar fields or function graphs.
Where Pith is reading between the lines
- The approach could be applied to spatial field outputs in physics simulations such as fluid flow or heat transfer to assess whether deformation-based calibration improves parameter recovery.
- Comparison against Euclidean or other functional distances on benchmark datasets would clarify when the LDDMM metric adds value.
- Kernel choice in the RKHS representation may require sensitivity checks to ensure the posterior remains stable across reasonable selections.
Load-bearing premise
That LDDMM distances provide a suitable, computationally feasible metric for the infinite-dimensional outputs without introducing intractable computations or unaccounted biases in the Bayesian procedure.
What would settle it
A controlled simulation with known true parameter values in which the posterior obtained via LDDMM calibration fails to concentrate around those values or the predictive posterior on shapes fails to cover the observed data.
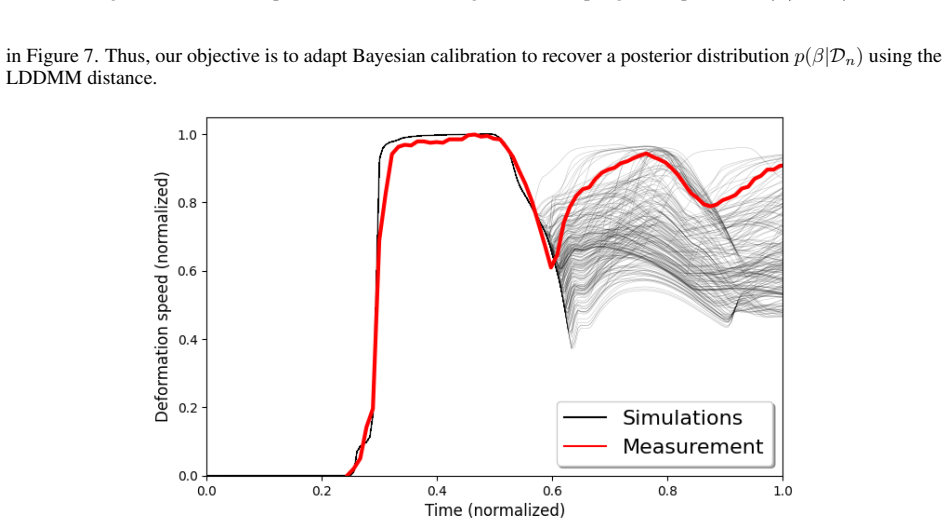
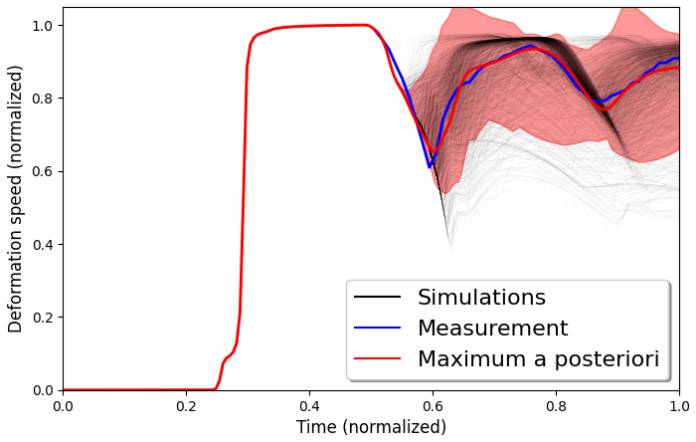
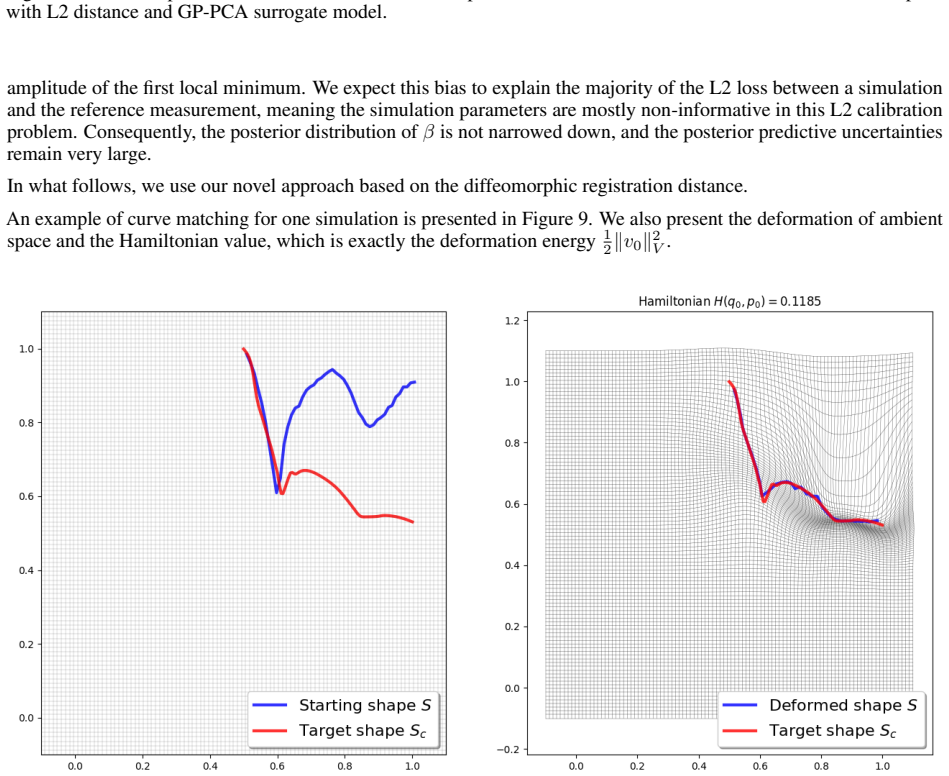
Figures
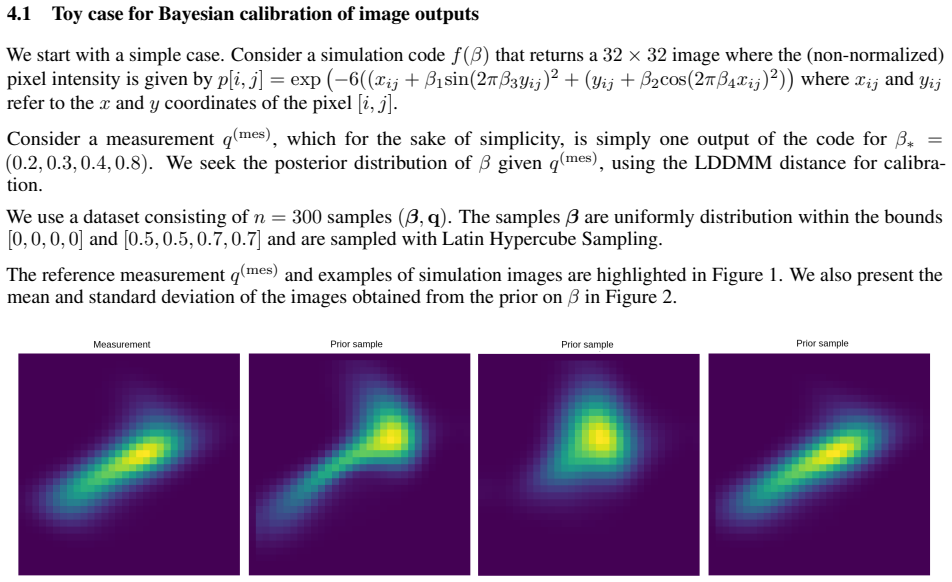








read the original abstract
The simulation of physical phenomena with computer models relies on the estimation of physical and/or numerical parameters calibrated to fit experimental data. The approximations within the computer model and the errors in the measurements lead to uncertainties in the calibrated parameters. Bayesian calibration offers a well-studied framework to provide reliable uncertainty quantification on the calibrated parameters. When dealing with complex computer codes whose outputs are infinite-dimensional, Bayesian calibration may be extended by providing a relevant distance in the output space. In this paper, Bayesian calibration is performed using distances from the large deformation diffeomorphic metric matching (LDDMM) framework. LDDMM distances can provide a suitable metric for infinite-dimensional shapes such as scalar fields (i.e. images) or function graphs. This metric can be interpreted as the minimal energy deformation required to transform one shape into another. As such, it provides a readily interpretable metric for Bayesian calibration. On top of this, the representation of the diffeomorphism group as an exponential transformation of an RKHS is compatible with Bayesian inference and allows to define a predictive posterior distribution on the infinite-dimensional space shape.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes extending Bayesian calibration to computer models with infinite-dimensional outputs (e.g., scalar fields or function graphs) by replacing standard discrepancy measures with distances from the large deformation diffeomorphic metric matching (LDDMM) framework. Diffeomorphisms are represented as exponentials of vector fields in a reproducing kernel Hilbert space (RKHS), yielding an interpretable minimal-energy deformation metric that is embedded in a Gaussian-process-style likelihood; the resulting posterior on calibration parameters then induces a predictive posterior on the shape space via push-forward under the deterministic model.
Significance. If the technical construction holds, the work supplies a geometrically natural and energy-based metric for shape-valued outputs that is compatible with standard Bayesian sampling schemes, potentially improving uncertainty quantification in applications such as image registration or functional data calibration. The explicit provision of velocity-field optimization, kernel choices, and posterior sampling steps constitutes a concrete, reproducible contribution.
minor comments (3)
- The abstract states that the RKHS representation 'allows to define a predictive posterior distribution on the infinite-dimensional space shape,' but the precise measure-theoretic construction (e.g., how the push-forward is rigorously defined on the shape manifold) is only sketched; a short dedicated paragraph or appendix lemma would clarify this for readers unfamiliar with infinite-dimensional Bayesian nonparametrics.
- Notation for the velocity fields, kernel, and energy functional is introduced progressively; a single consolidated table or notation box in §2 would improve readability.
- The manuscript supplies the necessary technical steps for implementation, yet no explicit statement appears on the computational scaling of the velocity-field optimization with respect to output dimension; a brief complexity remark or reference to existing LDDMM solvers would strengthen the feasibility claim.
Simulated Author's Rebuttal
We thank the referee for the positive and accurate summary of our manuscript, the assessment of its significance, and the recommendation for minor revision. No specific major comments were provided in the report.
Circularity Check
No significant circularity detected
full rationale
The derivation embeds an established LDDMM registration distance (from independent prior literature) as the metric inside a standard Bayesian likelihood for calibration parameters, then constructs the posterior predictive via push-forward under the deterministic model. No equation or step reduces a claimed result to a fitted quantity defined by the same data, nor does any load-bearing premise rest on a self-citation chain or ansatz smuggled from the authors' own prior work. The RKHS-exponential representation of diffeomorphisms is invoked only to make the distance and posterior well-defined, without self-definitional loops or renaming of known empirical patterns as novel derivations.
Axiom & Free-Parameter Ledger
axioms (1)
- standard math Properties of reproducing kernel Hilbert spaces and exponential maps on diffeomorphism groups
Reference graph
Works this paper leans on
-
[1]
Shape deformation analysis from the optimal control viewpoint
Sylvain Arguillere et al. “Shape deformation analysis from the optimal control viewpoint”. In:Journal de mathématiques pures et appliquées104.1 (2015), pp. 139–178
work page 2015
-
[2]
A supermartingale approach to Gaussian process based sequential design of experiments
Julien Bect, François Bachoc, and David Ginsbourger. “A supermartingale approach to Gaussian process based sequential design of experiments”. In:Bernoulli25.4A (2019), pp. 2883–2919
work page 2019
-
[3]
Computing large deformation metric mappings via geodesic flows of diffeomorphisms
M Faisal Beg et al. “Computing large deformation metric mappings via geodesic flows of diffeomorphisms”. In: International journal of computer vision61.2 (2005), pp. 139–157
work page 2005
-
[4]
Pyro: Deep Universal Probabilistic Programming
Eli Bingham et al. “Pyro: Deep Universal Probabilistic Programming”. In:Journal of Machine Learning Research (2018)
work page 2018
-
[5]
Multi-contrast large deformation diffeomorphic metric mapping for diffusion tensor imaging
Can Ceritoglu et al. “Multi-contrast large deformation diffeomorphic metric mapping for diffusion tensor imaging”. In:Neuroimage47.2 (2009), pp. 618–627
work page 2009
-
[6]
The fshape framework for the variability analysis of functional shapes
Benjamin Charlier, Nicolas Charon, and Alain Trouvé. “The fshape framework for the variability analysis of functional shapes”. In:Foundations of Computational Mathematics17.2 (2017), pp. 287–357
work page 2017
-
[7]
Functional currents: a new mathematical tool to model and analyse functional shapes
Nicolas Charon and Alain Trouvé. “Functional currents: a new mathematical tool to model and analyse functional shapes”. In:Journal of mathematical imaging and vision48.3 (2014), pp. 413–431
work page 2014
-
[8]
The varifold representation of nonoriented shapes for diffeomorphic registra- tion
Nicolas Charon and Alain Trouvé. “The varifold representation of nonoriented shapes for diffeomorphic registra- tion”. In:SIAM journal on Imaging Sciences6.4 (2013), pp. 2547–2580
work page 2013
-
[9]
Bayesian Registration of Functions and Curves
Wen Cheng, Ian Dryden, and Xianzheng Huang. “Bayesian Registration of Functions and Curves”. In:Bayesian Analysis11 (June 2016).DOI:10.1214/15-BA957
-
[10]
MMD-Bayes: Robust Bayesian estimation via maximum mean discrepancy
Badr-Eddine Chérief-Abdellatif and Pierre Alquier. “MMD-Bayes: Robust Bayesian estimation via maximum mean discrepancy”. In:Symposium on Advances in Approximate Bayesian Inference. PMLR. 2020, pp. 1–21
work page 2020
-
[11]
On discontinuity of planar optimal transport maps
Otis Chodosh et al. “On discontinuity of planar optimal transport maps”. In:Journal of Topology and Analysis 7.02 (2015), pp. 239–260
work page 2015
-
[12]
Peter Congdon.Bayesian models for categorical data. John Wiley & Sons, 2005
work page 2005
-
[13]
Bayesian emulation of complex multi-output and dynamic computer models
Stefano Conti and Anthony O’Hagan. “Bayesian emulation of complex multi-output and dynamic computer models”. In:Journal of statistical planning and inference140.3 (2010), pp. 640–651
work page 2010
-
[14]
Simon Duane et al. “Hybrid monte carlo”. In:Physics letters B195.2 (1987), pp. 216–222
work page 1987
-
[15]
Optimal data-driven sparse parameterization of diffeomorphisms for population analysis
Sandy Durrleman et al. “Optimal data-driven sparse parameterization of diffeomorphisms for population analysis”. In:Biennial International Conference on Information Processing in Medical Imaging. Springer. 2011, pp. 123– 134
work page 2011
-
[16]
Metamorphic image registration using a semi-Lagrangian scheme
Anton François, Pietro Gori, and Joan Glaunès. “Metamorphic image registration using a semi-Lagrangian scheme”. In:International Conference on Geometric Science of Information. Springer. 2021, pp. 781–788
work page 2021
-
[17]
Elastic Bayesian model calibration
Devin Francom et al. “Elastic Bayesian model calibration”. In:SIAM/ASA Journal on Uncertainty Quantification 13.1 (2025), pp. 195–227
work page 2025
-
[18]
Riemann manifold langevin and hamiltonian monte carlo methods
Mark Girolami and Ben Calderhead. “Riemann manifold langevin and hamiltonian monte carlo methods”. In: Journal of the Royal Statistical Society Series B: Statistical Methodology73.2 (2011), pp. 123–214
work page 2011
-
[19]
Computer model calibration using high-dimensional output
Dave Higdon et al. “Computer model calibration using high-dimensional output”. In:Journal of the American Statistical Association103.482 (2008), pp. 570–583
work page 2008
-
[20]
The No-U-Turn sampler: adaptively setting path lengths in Hamiltonian Monte Carlo
Matthew D Hoffman, Andrew Gelman, et al. “The No-U-Turn sampler: adaptively setting path lengths in Hamiltonian Monte Carlo.” In:J. Mach. Learn. Res.15.1 (2014), pp. 1593–1623
work page 2014
-
[21]
The Euler-Poincaré theory of metamorphosis
Darryl Holm, Alain Trouvé, and Laurent Younes. “The Euler-Poincaré theory of metamorphosis”. In:Quarterly of Applied Mathematics67.4 (2009), pp. 661–685
work page 2009
-
[22]
Bayesian calibration of computer models
Marc C Kennedy and Anthony O’Hagan. “Bayesian calibration of computer models”. In:Journal of the Royal Statistical Society: Series B (Statistical Methodology)63.3 (2001), pp. 425–464
work page 2001
-
[23]
Adam: A Method for Stochastic Optimization
Diederik P Kingma and Jimmy Ba. “Adam: A method for stochastic optimization”. In:arXiv preprint arXiv:1412.6980(2014)
work page internal anchor Pith review Pith/arXiv arXiv 2014
-
[24]
Andreas Mang and Lars Ruthotto. “A Lagrangian Gauss–Newton–Krylov solver for mass-and intensity- preserving diffeomorphic image registration”. In:SIAM Journal on Scientific Computing39.5 (2017), B860– B885
work page 2017
-
[25]
Amandine Marrel and Bertrand Iooss. “Probabilistic surrogate modeling by Gaussian process: A new estimation algorithm for more robust prediction”. In:Reliability Engineering & System Safety247 (2024), p. 110120
work page 2024
-
[26]
Geodesic shooting for computational anatomy
Michael I Miller, Alain Trouvé, and Laurent Younes. “Geodesic shooting for computational anatomy”. In: Journal of mathematical imaging and vision24.2 (2006), pp. 209–228. 22
work page 2006
-
[27]
On the metrics and Euler-Lagrange equations of computa- tional anatomy
Michael I Miller, Alain Trouvé, and Laurent Younes. “On the metrics and Euler-Lagrange equations of computa- tional anatomy”. In:Annual review of biomedical engineering4.1 (2002), pp. 375–405
work page 2002
-
[28]
Bayesian learning via stochastic dynamics
Radford Neal. “Bayesian learning via stochastic dynamics”. In:Advances in neural information processing systems5 (1992)
work page 1992
-
[29]
Calibration of Johnson’s damage model by a Bayesian approach
Guillaume Perrin and Laurianne Pillon. “Calibration of Johnson’s damage model by a Bayesian approach”. In: EPJ Web of Conferences. V ol. 183. EDP Sciences. 2018, p. 01037
work page 2018
-
[30]
Change of measure for Bayesian field inversion with hierarchical hyperparameters sampling
Nadège Polette et al. “Change of measure for Bayesian field inversion with hierarchical hyperparameters sampling”. In:Journal of Computational Physics529 (2025), p. 113888
work page 2025
-
[31]
Thomas J Santner et al.The design and analysis of computer experiments. V ol. 1. Springer, 2003
work page 2003
-
[32]
Curtis B Storlie et al. “Calibration of computational models with categorical parameters and correlated outputs via Bayesian smoothing spline ANOV A”. In:Journal of the American Statistical Association110.509 (2015), pp. 68–82
work page 2015
-
[33]
Inverse problems: a Bayesian perspective
Andrew M Stuart. “Inverse problems: a Bayesian perspective”. In:Acta numerica19 (2010), pp. 451–559
work page 2010
-
[34]
Diffeomorphisms groups and pattern matching in image analysis
Alain Trouvé. “Diffeomorphisms groups and pattern matching in image analysis”. In:International journal of computer vision28.3 (1998), pp. 213–221
work page 1998
-
[35]
Local geometry of deformable templates
Alain Trouvé and Laurent Younes. “Local geometry of deformable templates”. In:SIAM journal on mathematical analysis37.1 (2005), pp. 17–59
work page 2005
-
[36]
Metamorphoses through lie group action
Alain Trouvé and Laurent Younes. “Metamorphoses through lie group action”. In:Foundations of computational mathematics5.2 (2005), pp. 173–198
work page 2005
-
[37]
Diffeomorphic 3D image registration via geodesic shooting using an efficient adjoint calculation
François-Xavier Vialard et al. “Diffeomorphic 3D image registration via geodesic shooting using an efficient adjoint calculation”. In:International Journal of Computer Vision97.2 (2012), pp. 229–241
work page 2012
-
[38]
Analysis of AneuRisk65 data: Elastic shape registration of curves
Qian Xie, Sebastian Kurtek, and Anuj Srivastava. “Analysis of AneuRisk65 data: Elastic shape registration of curves”. In:Electronic Journal of Statistics8.2 (2014), pp. 1920–1929.DOI: 10.1214/14- EJS938D .URL: https://doi.org/10.1214/14-EJS938D
work page doi:10.1214/14- 2014
-
[39]
Laurent Younes.Shapes and diffeomorphisms. V ol. 171. Springer, 2010
work page 2010
-
[40]
Springer Science & Business Media, 2013
Eberhard Zeidler.Nonlinear functional analysis and its applications: III: variational methods and optimization. Springer Science & Business Media, 2013. 23
work page 2013
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.