Recognition: 2 theorem links
· Lean TheoremLearning Point Cloud Geometry as a Statistical Manifold: Theory and Practice
Pith reviewed 2026-05-12 05:30 UTC · model grok-4.3
The pith
Point cloud local geometry can be represented as a statistical manifold of per-point Gaussians learned self-supervised from sparse observations.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
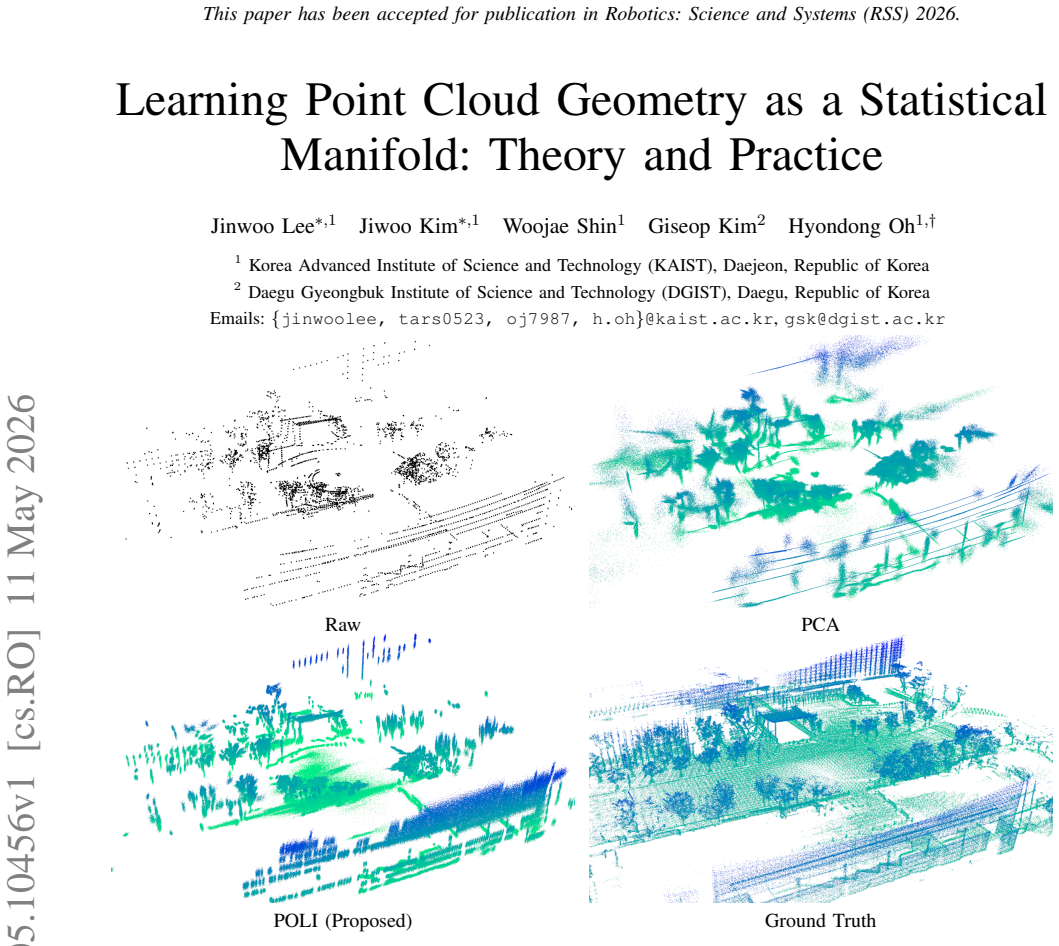
We represent local geometry as a statistical manifold induced by a family of Gaussian distributions, where each point is associated with a Gaussian capturing its local geometric structure. Based on this formulation, we introduce Point-to-Ellipsoid (POLI), a deep neural estimator that predicts per-point Gaussian geometry. POLI learns a mapping from point cloud observations to their underlying geometry in a self-supervised manner, removing the need for labeled data while preserving strong geometric inductive biases.
What carries the argument
The statistical manifold induced by a family of Gaussian distributions, one per point, that encodes local geometric structure such as shape and orientation.
If this is right
- Self-supervised recovery of per-point geometry parameters directly from sparse inputs without external labels.
- Seamless insertion of the Gaussian representation into existing robotic perception pipelines.
- Consistent performance gains on tasks including localization, mapping, and object pose estimation.
- Reduced reliance on hand-crafted statistics or large supervised datasets for geometry estimation.
Where Pith is reading between the lines
- The Gaussian manifold could be replaced by other parametric families to handle non-elliptical local structures if the single-Gaussian assumption proves too restrictive.
- The same self-supervised training principle might transfer to other 3D sensing modalities such as RGB-D or radar point clouds.
- Downstream modules could use the predicted covariance matrices to propagate uncertainty estimates into planning or control loops.
Load-bearing premise
Local scene geometry around each point is adequately captured by a single Gaussian distribution and a self-supervised loss can recover accurate parameters without any labeled geometry data.
What would settle it
Compare the predicted Gaussian parameters against the empirical covariance of densely sampled points in a ground-truth scene; if the predicted ellipsoids systematically deviate from the true local structure or fail to improve downstream perception metrics, the claim is falsified.
Figures







read the original abstract
Point clouds are a fundamental representation for robotic perception tasks such as localization, mapping, and object pose estimation. However, LiDAR-acquired point clouds are inherently sparse and non-uniform, providing incomplete observations of the underlying scene geometry. This makes reliable geometric reasoning challenging and degrades downstream perception performance. Existing approaches attempt to compensate for these limitations by estimating local geometry, but often rely on hand-crafted statistics or end-to-end supervised learning, which can suffer from limited scalability or require large amounts of accurately labeled data. To address these challenges, we explicitly model point cloud geometry under a principled mathematical formulation. We represent local geometry as a statistical manifold induced by a family of Gaussian distributions, where each point is associated with a Gaussian capturing its local geometric structure. Based on this formulation, we introduce Point-to-Ellipsoid (POLI), a deep neural estimator that predicts per-point Gaussian geometry. POLI learns a mapping from point cloud observations to their underlying geometry in a self-supervised manner, removing the need for labeled data while preserving strong geometric inductive biases. The resulting representation integrates seamlessly into existing robotic perception pipelines without architectural modifications. Extensive experiments show that POLI enables accurate and robust geometry estimation and consistently improves performance across diverse robotic perception tasks.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes modeling local geometry in point clouds as a statistical manifold induced by a family of per-point Gaussian distributions. It introduces POLI, a deep neural network that predicts these Gaussian parameters from raw point cloud observations in a self-supervised manner, with the goal of improving downstream robotic perception tasks such as localization, mapping, and pose estimation without requiring labeled geometry data.
Significance. If the central claims hold, the work provides a principled integration of statistical manifold theory with self-supervised learning for handling sparse and non-uniform point clouds, a common challenge in robotics. The self-supervised formulation with geometric inductive biases and seamless integration into existing pipelines is a strength; the approach could reduce dependence on large labeled datasets while offering interpretable local geometry estimates.
minor comments (3)
- Abstract: The abstract states the high-level formulation but omits any key equation, loss function, or quantitative result, which reduces immediate clarity on the precise technical contribution.
- The manuscript would benefit from an explicit statement of the self-supervised loss in the main text (rather than only in supplementary material) to allow readers to verify how the Gaussian parameters are recovered without ground-truth geometry.
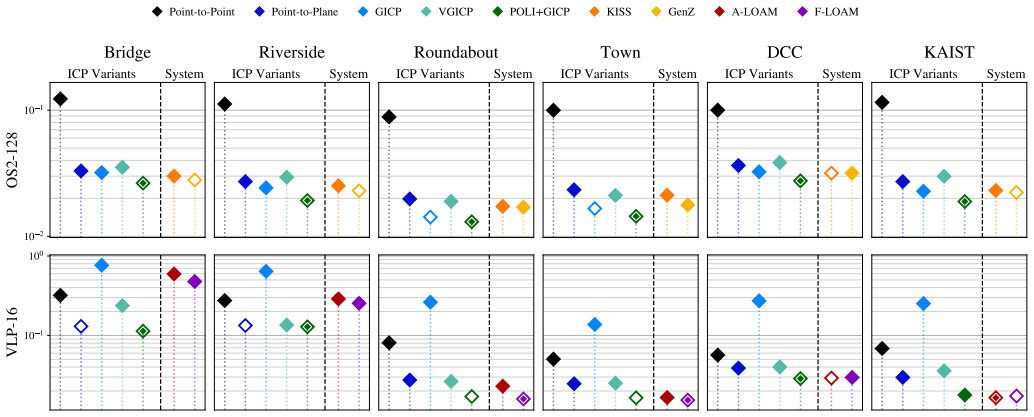
- Figure captions and axis labels in the experimental section could be expanded to include the exact metrics and baselines used, improving reproducibility.
Simulated Author's Rebuttal
We thank the referee for their positive summary, significance assessment, and recommendation for minor revision. The report accurately reflects our contribution of casting point cloud geometry as a statistical manifold of per-point Gaussians learned self-supervisedly via POLI. As no specific major comments appear in the report, we provide no point-by-point responses below and will incorporate any minor suggestions into the revised manuscript.
Circularity Check
No significant circularity; derivation remains self-contained against external benchmarks
full rationale
The provided abstract and high-level formulation present a modeling choice (local geometry as per-point Gaussians on a statistical manifold) followed by a self-supervised estimator (POLI) without any visible equations, fitted parameters renamed as predictions, or load-bearing self-citations. No derivation chain is stated that reduces a claimed result to its own inputs by construction. The approach is internally consistent at the level of description given, with the central claim resting on the inductive bias of Gaussian modeling and self-supervision rather than on any tautological step. This is the expected honest non-finding for a paper whose core contribution is a new representation and learning method without exhibited self-referential math.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Local geometry around each point can be represented by a Gaussian distribution
- domain assumption Self-supervised learning can recover accurate Gaussian parameters from incomplete observations
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
we model point cloud geometry as a statistical manifold, denoted by M^g, induced by Gaussian distributions... each parameterized by a mean x̄_gi ∈ R^3 and a covariance matrix C_gi ∈ S^3_+
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Φ(T; C_q) ≜ ½ Σ [log|2C_qi| + d_i^T (2C_qi)^{-1} d_i] + ½ log|Γ| + ½ ξ(T)^T Γ^{-1} ξ(T)
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
American Mathematical Soc., 2000
Shun-ichi Amari and Hiroshi Nagaoka.Methods of infor- mation geometry, volume 191. American Mathematical Soc., 2000. URL https://books.google.co.kr/books?hl= ko&lr=&id=vc2FWSo7wLUC&oi=fnd&pg=PR7&dq= Methods+of+information+geometry&ots=4JsyKx44L &sig=ZMJpkAT36TZSpRPPkYM-gxyXLLM&redir esc=y#v=onepage&q=Methods%20of%20information% 20geometry&f=false
work page 2000
-
[2]
DeepFit: 3D Surface Fitting via Neural Network Weighted Least Squares
Yizhak Ben-Shabat and Stephen Gould. DeepFit: 3D Surface Fitting via Neural Network Weighted Least Squares. InEuropean Conference on Computer Vi- sion (ECCV), 2020. doi: 10.1007/978-3-030-58452-8
-
[3]
URL https://link.springer.com/chapter/10.1007/ 978-3-030-58452-8 2
-
[4]
Nesti-Net: Normal Estimation for Unstructured 3D Point Clouds Using Convolutional Neural Networks
Yizhak Ben-Shabat, Michael Lindenbaum, and Anath Fischer. Nesti-Net: Normal Estimation for Unstructured 3D Point Clouds Using Convolutional Neural Networks. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR),
-
[5]
doi: 10.1109/CVPR.2019.01035. URL https://openaccess.thecvf.com/content CVPR 2019/ html/Ben-Shabat Nesti-Net Normal Estimation for Unstructured 3D Point Clouds Using Convolutional CVPR 2019 paper.html
-
[6]
Paul J. Besl and Neil D. McKay. A Method for Registration of 3D Shapes.IEEE Transactions on Pattern Analysis and Machine Intelligence, 14(2):239– 256, 1992. doi: 10.1109/34.121791. URL https://www. spiedigitallibrary.org/conference-proceedings-of-spie/ 1611/1/Method-for-registration-of-3-D-shapes/10.1117/ 12.57955.short
-
[7]
Mathieu Blondel, Quentin Berthet, Marco Cuturi, Roy Frostig, Stephan Hoyer, Felipe Llinares-L ´opez, Fabian Pedregosa, and Jean-Philippe Vert. Efficient and modular implicit differentiation.Advances in neural information processing systems, 35:5230–5242, 2022. URL https: //proceedings.neurips.cc/paper files/paper/2022/hash/ 228b9279ecf9bbafe582406850c5711...
work page 2022
-
[8]
Convex global 3d registration with lagrangian duality
Jesus Briales and Javier Gonzalez-Jimenez. Convex global 3d registration with lagrangian duality. InPro- ceedings of the IEEE conference on computer vision and pattern recognition, pages 4960–4969, 2017
work page 2017
-
[9]
A volumetric method for building complex models from range images
Brian Curless and Marc Levoy. A volumetric method for building complex models from range images. InProceed- ings of the 23rd annual conference on Computer graphics and interactive techniques, pages 303–312, 1996. URL https://dl.acm.org/doi/abs/10.1145/237170.237269
-
[10]
Courier Dover Publications, 2016
Manfredo P Do Carmo.Differential geometry of curves and surfaces: revised and updated second edition. Courier Dover Publications, 2016
work page 2016
-
[11]
Are we ready for autonomous driving? the kitti vision bench- mark suite
Andreas Geiger, Philip Lenz, and Raquel Urtasun. Are we ready for autonomous driving? the kitti vision bench- mark suite. In2012 IEEE conference on computer vision and pattern recognition, pages 3354–3361. IEEE,
-
[12]
URL https://ieeexplore.ieee.org/abstract/document/ 6248074
-
[13]
EVO: Python Package for the Evaluation of Odometry and SLAM, 2017
Michael Grupp. EVO: Python Package for the Evaluation of Odometry and SLAM, 2017. URL https://github.com/ MichaelGrupp/evo
work page 2017
-
[14]
Rotational Projection Statistics for 3D Local Surface Description and Object Recognition
Yulan Guo, Ferdous Sohel, Mohammed Bennamoun, Min Lu, and Jianwei Wan. Rotational Projection Statistics for 3D Local Surface Description and Object Recognition. International Journal of Computer Vision, 105(1):63–86,
-
[15]
URL https:// link.springer.com/article/10.1007/s11263-013-0627-y
doi: 10.1007/s11263-013-0627-y. URL https:// link.springer.com/article/10.1007/s11263-013-0627-y
-
[16]
Connor Holmes, Frederike D ¨umbgen, and Timothy Bar- foot. On semidefinite relaxations for matrix-weighted state-estimation problems in robotics.IEEE Transac- tions on Robotics, 40:4805–4824, 2024. URL https: //ieeexplore.ieee.org/abstract/document/10706005
-
[17]
SDPRLayers: Certifiable Backpropagation Through Polynomial Optimization Problems in Robotics
Connor Holmes, Frederike D ¨umbgen, and Timothy D Barfoot. SDPRLayers: Certifiable Backpropagation Through Polynomial Optimization Problems in Robotics. IEEE Transactions on Robotics, 2025. URL https: //ieeexplore.ieee.org/abstract/document/11029144/
-
[18]
Surface reconstruction from unorganized points
Hugues Hoppe, Tony DeRose, Tom Duchamp, John McDonald, and Werner Stuetzle. Surface reconstruction from unorganized points. InProceedings of the 19th annual conference on computer graphics and interactive techniques, pages 71–78, 1992. URL https://dl.acm.org/ doi/abs/10.1145/133994.134011
-
[19]
Minwoo Jung, Wooseong Yang, Dongjae Lee, Hyeon- jae Gil, Giseop Kim, and Ayoung Kim. HeLiPR: Heterogeneous LiDAR Dataset for Inter-LiDAR Place Recognition Under Spatiotemporal Variations.The In- ternational Journal of Robotics Research, 43(3):1867– 1883, 2024. URL https://journals.sagepub.com/doi/full/ 10.1177/02783649241242136
-
[20]
V oxelized GICP for Fast and Accu- rate 3D Point Cloud Registration
Kenji Koide, Masashi Yokozuka, Shuji Oishi, and At- suhiko Banno. V oxelized GICP for Fast and Accu- rate 3D Point Cloud Registration. InProceedings of the IEEE International Conference on Robotics and Automation (ICRA), pages 11054–11059, 2021. URL https://ieeexplore.ieee.org/abstract/document/9560835
-
[21]
Kenji Koide, Masashi Yokozuka, Shuji Oishi, and At- suhiko Banno. GLIM: 3D range-inertial localiza- tion and mapping with GPU-accelerated scan match- ing factors.Robotics and Autonomous Systems, 179: 104750, 2024. URL https://www.sciencedirect.com/ science/article/pii/S0921889024001349
work page 2024
-
[22]
Implicit LiDAR network: LiDAR super-resolution via interpolation weight prediction
Youngsun Kwon, Minhyuk Sung, and Sung-Eui Yoon. Implicit LiDAR network: LiDAR super-resolution via interpolation weight prediction. In2022 international conference on robotics and automation (ICRA), pages 8424–8430. IEEE, 2022. URL https://ieeexplore.ieee.org/ abstract/document/9811992
-
[23]
Daehan Lee, Hyungtae Lim, and Soohee Han. GenZ-ICP: Generalizable and Degeneracy-Robust LiDAR Odometry Using an Adaptive Weighting.IEEE Robotics and Automation Letters, 9(1):456–463, 2024. URL https: //ieeexplore.ieee.org/abstract/document/10753079
-
[24]
Deep iterative surface normal estimation
Jan Eric Lenssen, Christian Osendorfer, and Jonathan Masci. Deep iterative surface normal estimation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 11247–11256,
-
[25]
URL https://openaccess.thecvf.com/content CVPR 2020/html/Lenssen Deep Iterative Surface Normal Estimation CVPR 2020 paper.html
work page 2020
-
[26]
Learning Normals of Noisy Points by Local Gradient-Aware Surface Filtering
Qing Li, Huifang Feng, Xun Gong, and Yu-Shen Liu. Learning Normals of Noisy Points by Local Gradient-Aware Surface Filtering. InProceedings of the IEEE/CVF International Conference on Computer Vision, pages 28828–28838, 2025. URL https://openaccess.thecvf.com/content/ICCV2025/html/ Li Learning Normals of Noisy Points by Local Gradient-Aware Surface Filter...
work page 2025
-
[27]
Yuanqi Li, Jingcheng Huang, Hongshen Wang, Peiyuan Lv, Yansong Liu, Jiuming Zheng, Jie Guo, and Yanwen Guo. High-quality Point Cloud Oriented Normal Estimation via Hybrid Angular and Euclidean Distance Encoding. InProceedings of the Computer Vision and Pattern Recognition Conference, pages 1287–1296, 2025. URL https://openaccess.thecvf.com/ content/CVPR20...
work page 2025
-
[28]
Hyungtae Lim, Beomsoo Kim, Daebeom Kim, Eu- ngchang Mason Lee, and Hyun Myung. Quatro++: Robust global registration exploiting ground segmen- tation for loop closing in LiDAR SLAM.The In- ternational Journal of Robotics Research, 43(5):685– 715, 2024. URL https://journals.sagepub.com/doi/full/10. 1177/02783649231207654
work page 2024
-
[29]
KISS-Matcher: Fast and Robust Point Cloud Registration Revisited
Hyungtae Lim, Daebeom Kim, Gunhee Shin, Jingnan Shi, Ignacio Vizzo, Hyun Myung, Jaesik Park, and Luca Carlone. KISS-Matcher: Fast and Robust Point Cloud Registration Revisited. InProceedings of the IEEE International Conference on Robotics and Automation,
-
[30]
URL https://ieeexplore.ieee.org/abstract/document/ 11127458
-
[31]
Cambridge university press, 2003
David JC MacKay.Information theory, inference and learning algorithms. Cambridge university press, 2003. URL https://books.google.co.kr/ books?hl=ko&lr=&id=AKuMj4PN EMC&oi=fnd& pg=PR11&dq=Information+theory,+inference+ and+learning+algorithms&ots=EOnrla3wBb&sig= 6ziiQReq1O5rpGa9MGPyKNwGdeI&redir esc=y#v= onepage&q=Information%20theory%2C%20inference% 20an...
work page 2003
-
[32]
Scaling Diffusion Models to Real-World 3D LiDAR Scene Completion
Lucas Nunes, Rodrigo Marcuzzi, Benedikt Mersch, Jens Behley, and Cyrill Stachniss. Scaling Diffusion Models to Real-World 3D LiDAR Scene Completion. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 14770–14780, 2024. URL https://openaccess.thecvf.com/content/CVPR2024/html/ Nunes Scaling Diffusion Models to ...
work page 2024
-
[33]
Multi- scale feature extraction on point-sampled surfaces
Mark Pauly, Richard Keiser, and Markus Gross. Multi- scale feature extraction on point-sampled surfaces. In Computer Graphics Forum, volume 22, pages 281–289. Wiley Online Library, 2003. URL https://onlinelibrary. wiley.com/doi/full/10.1111/1467-8659.00675
-
[34]
Charles Ruizhongtai Qi, Li Yi, Hao Su, and Leonidas J. Guibas. PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space. InAdvances in Neural Information Processing Systems, 2017. URL https://proceedings.neurips.cc/paper/2017/hash/ d8bf84be3800d12f74d8b05e9b89836f-Abstract.html
work page 2017
-
[35]
Pu-transformer: Point cloud upsampling transformer
Shi Qiu, Saeed Anwar, and Nick Barnes. Pu-transformer: Point cloud upsampling transformer. InProceedings of the Asian conference on computer vision, pages 2475– 2493, 2022. URL https://openaccess.thecvf.com/content/ ACCV2022/html/Qiu PU-Transformer Point Cloud Upsampling Transformer ACCV 2022 paper.html
work page 2022
-
[36]
Efficient Vari- ants of the ICP Algorithm
Szymon Rusinkiewicz and Marc Levoy. Efficient Vari- ants of the ICP Algorithm. InProceedings of the Interna- tional Conference on 3D Digital Imaging and Modeling,
-
[37]
URL https://ieeexplore.ieee.org/abstract/document/ 924423
-
[38]
Marton, Nico Blodow, and Michael Beetz
Radu Bogdan Rusu, Zoltan C. Marton, Nico Blodow, and Michael Beetz. Persistent Point Feature Histograms for 3D Point Clouds. InProceedings of the 10th Inter- national Conference on Intelligent Autonomous Systems (IAS), 2008. URL https://ebooks.iospress.nl/doi/10.3233/ 978-1-58603-887-8-119
work page 2008
-
[39]
Fast Point Feature Histograms (FPFH) for 3D registra- tion
Radu Bogdan Rusu, Nico Blodow, and Michael Beetz. Fast Point Feature Histograms (FPFH) for 3D registra- tion. In2009 IEEE International Conference on Robotics and Automation, pages 3212–3217. IEEE, 2009
work page 2009
-
[40]
Avi Segal, Dirk Haehnel, and Sebastian Thrun. Generalized-ICP. InProceedings of Robotics: Science and Systems, 2009. URL https://www.robots.ox.ac.uk/ ∼avsegal/resources/papers/Generalized ICP.pdf
work page 2009
-
[41]
Minkyun Seo, Hyungtae Lim, Kanghee Lee, Luca Car- lone, and Jaesik Park. BUFFER-X: Towards Zero- Shot Point Cloud Registration in Diverse Scenes.arXiv preprint arXiv:2503.07940, 2025. URL https://arxiv.org/ abs/2503.07940
-
[42]
ROBIN: a graph-theoretic approach to reject outliers in robust estimation using invariants
Jingnan Shi, Heng Yang, and Luca Carlone. ROBIN: a graph-theoretic approach to reject outliers in robust estimation using invariants. In2021 IEEE International Conference on Robotics and Automation (ICRA), pages 13820–13827. IEEE, 2021. URL https://ieeexplore.ieee. org/abstract/document/9562007
-
[43]
Unique Signatures of Histograms for Local Surface Description
Federico Tombari, Samuele Salti, and Luigi Di Stefano. Unique Signatures of Histograms for Local Surface Description. InProceedings of the European Con- ference on Computer Vision (ECCV), pages 356–369,
-
[44]
URL https://link.springer.com/chapter/10.1007/ 978-3-642-15558-1 26
-
[45]
Ignacio Vizzo, Benedikt Mersch, Rodrigo Marcuzzi, Louis Wiesmann, Jens Behley, and Cyrill Stachniss. Make it dense: Self-supervised geometric scan comple- tion of sparse 3D lidar scans in large outdoor envi- ronments.IEEE Robotics and Automation Letters, 7 (3):8534–8541, 2022. URL https://ieeexplore.ieee.org/ abstract/document/9812507
-
[46]
Ignacio Vizzo, Tiziano Guadagnino, Benedikt Mersch, Louis Wiesmann, Jens Behley, and Cyrill Stachniss. KISS-ICP: In Defense of Point-to-Point ICP – Simple, Accurate, and Robust Registration If Done the Right Way.IEEE Robotics and Automation Letters, 8(2):1029– 1036, 2023. URL https://ieeexplore.ieee.org/abstract/ document/10015694/
-
[47]
F-LOAM: Fast Lidar Odometry and Mapping
Han Wang, Chen Wang, Chun-Lin Chen, and Lihua Xie. F-LOAM: Fast Lidar Odometry and Mapping. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2021. URL https: //ieeexplore.ieee.org/abstract/document/9636655
-
[48]
FAST-LIO: A Fast, Robust LiDAR-Inertial Odometry Package by Tightly-Coupled Iterated Kalman Filter
Wei Xu, Yixi Cai, Dawei He, Jiarong Lin, and Fu Zhang. FAST-LIO: A Fast, Robust LiDAR-Inertial Odometry Package by Tightly-Coupled Iterated Kalman Filter. IEEE Robotics and Automation Letters, 2021. doi: 10.1109/LRA.2021.3064227. URL https://ieeexplore. ieee.org/abstract/document/9372856/
-
[49]
FAST-LIO2: Fast Direct LiDAR-Inertial Odometry.IEEE Transactions on Robotics, 2022
Wei Xu, Yixi Cai, Dawei He, Jiarong Lin, and Fu Zhang. FAST-LIO2: Fast Direct LiDAR-Inertial Odometry.IEEE Transactions on Robotics, 2022. doi: 10.1109/TRO.2022.3141876. URL https://ieeexplore. ieee.org/abstract/document/9697912/
-
[50]
Tulip: Transformer for upsampling of lidar point clouds
Bin Yang, Patrick Pfreundschuh, Roland Siegwart, Marco Hutter, Peyman Moghadam, and Vaishakh Patil. Tulip: Transformer for upsampling of lidar point clouds. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 15354–15364, 2024. URL https://openaccess.thecvf.com/content/CVPR2024/ html/Yang TULIP Transformer for Upsamp...
work page 2024
-
[51]
Heng Yang, Jingnan Shi, and Luca Carlone. Teaser: Fast and certifiable point cloud registration.IEEE Transactions on Robotics, 37(2):314–333, 2020. URL https://ieeexplore.ieee.org/abstract/document/9286491/
-
[52]
RPM-Net: Robust Point Matching Using Learned Features
Zi Jian Yew and Gim Hee Lee. RPM-Net: Robust Point Matching Using Learned Features. In2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 11821–11830,
-
[53]
doi: 10.1109/CVPR42600.2020.01184. URL https://openaccess.thecvf.com/content CVPR 2020/ html/Yew RPM-Net Robust Point Matching Using Learned Features CVPR 2020 paper.html
-
[54]
LOAM: Lidar Odometry and Mapping in Real-time
Ji Zhang and Sanjiv Singh. LOAM: Lidar Odometry and Mapping in Real-time. InProceedings of Robotics: Science and Systems, Berkeley, USA, July 2014. doi: 10. 15607/RSS.2014.X.007. URL https://www.ri.cmu.edu/ pub files/2014/7/Ji LidarMapping RSS2014 v8.pdf
work page 2014
-
[55]
3D shape generation and completion through point-voxel diffusion
Linqi Zhou, Yilun Du, and Jiajun Wu. 3D shape generation and completion through point-voxel diffusion. InProceedings of the IEEE/CVF International Conference on Computer Vision, pages 5826–5835, 2021. URL https://openaccess.thecvf.com/content/ICCV2021/ html/Zhou 3D Shape Generation and Completion Through Point-V oxel Diffusion ICCV 2021 paper. html?ref=ht...
work page 2021
-
[56]
Qian-Yi Zhou, Jaesik Park, and Vladlen Koltun. Fast Global Registration. InProceedings of the European Conference on Computer Vision (ECCV), pages 766– 782, 2016. URL https://link.springer.com/chapter/10. 1007/978-3-319-46475-6 47
work page 2016
-
[57]
Open3D: A Modern Library for 3D Data Processing
Qian-Yi Zhou, Jaesik Park, and Vladlen Koltun. Open3D: A Modern Library for 3D Data Processing.arXiv preprint arXiv:1801.09847, 2018. URL https://arxiv.org/ abs/1801.09847. SU P P L E M E N T A R YMA T E R I A L Learning Point Cloud Geometry as a Statistical Manifold: Theory and Practice Jinwoo Lee *,1 Jiwoo Kim *,1 Woojae Shin1 Giseop Kim 2 Hyondong Oh †...
work page internal anchor Pith review arXiv 2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.