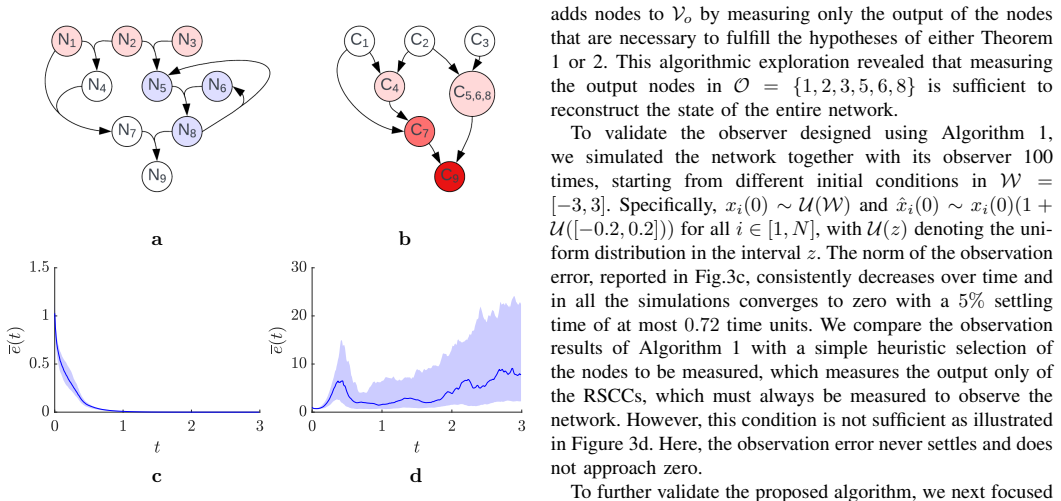
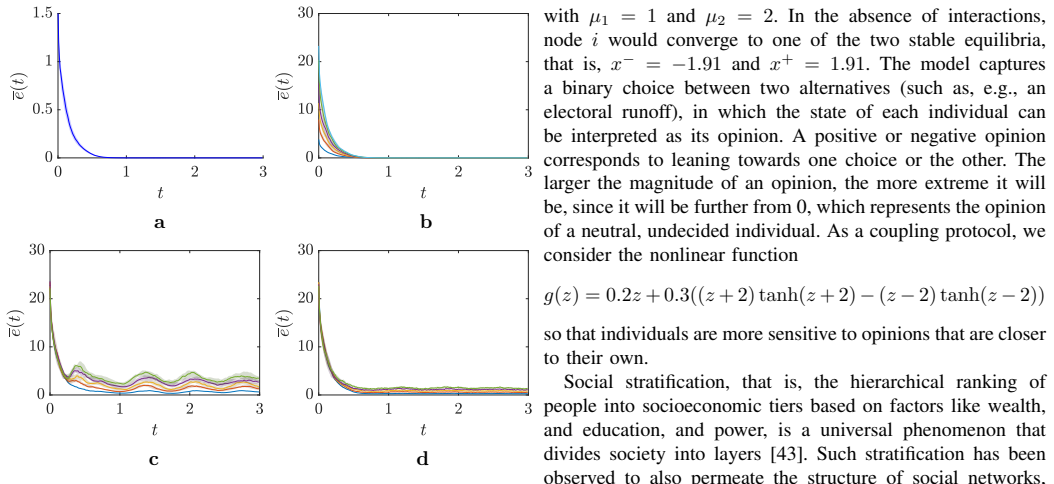
Recognition: 2 theorem links
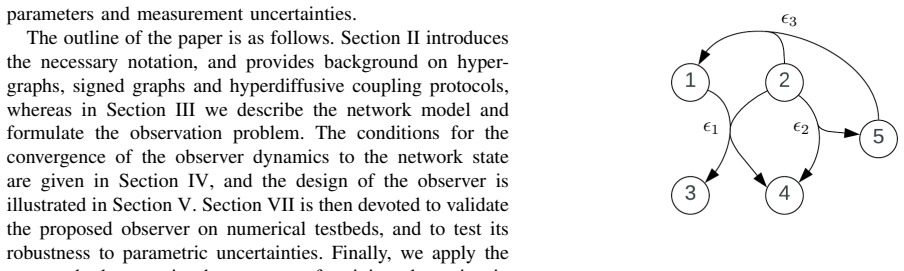
· Lean TheoremObserving the state of networks with directed higher-order interactions
Pith reviewed 2026-05-12 04:58 UTC · model grok-4.3
The pith
An algorithmic procedure selects which nodes to measure and designs observer gains so the full state of a nonlinear network can be reconstructed from partial observations even when interactions are directed and higher-order.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
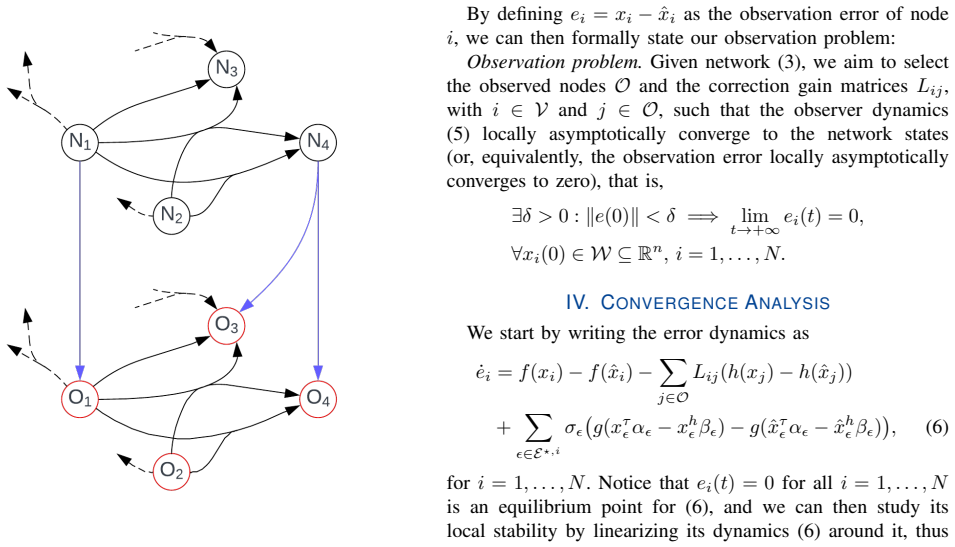
For networks of nonlinear dynamical systems with directed higher-order interactions, an algorithmic procedure simultaneously selects a set of nodes to measure and computes observer gains such that the resulting observer asymptotically reconstructs the entire network state, with the selection and gains chosen to satisfy proven convergence conditions on the error dynamics.
What carries the argument
Algorithmic observer design procedure that jointly picks measured nodes and gains, grounded on convergence analysis of the state estimation error for the given class of nonlinear dynamics and interactions.
If this is right
- Only a subset of nodes needs to be measured to recover the full state.
- The same design works across different directed higher-order topologies provided the convergence conditions hold.
- The procedure can be applied directly to reconstruct hidden opinions in a group of agents.
- Numerical tests confirm that the observer remains effective under parameter variations and noise.
Where Pith is reading between the lines
- Sensor placement costs in large-scale systems could be reduced by using the selection step to minimize the number of measured nodes.
- The method might extend to networks whose structure changes over time if the convergence conditions can be checked adaptively.
- Similar observer designs could apply to other domains such as power networks or epidemic models that feature higher-order or directed couplings.
Load-bearing premise
The network structure and nonlinear functions must satisfy the implicit conditions that make the error dynamics converge under the chosen measurements and gains.
What would settle it
Construct a concrete network obeying the stated class of dynamics and interactions, run the algorithmic procedure to obtain nodes and gains, then simulate the observer and check whether the state error fails to converge to zero.
Figures
read the original abstract
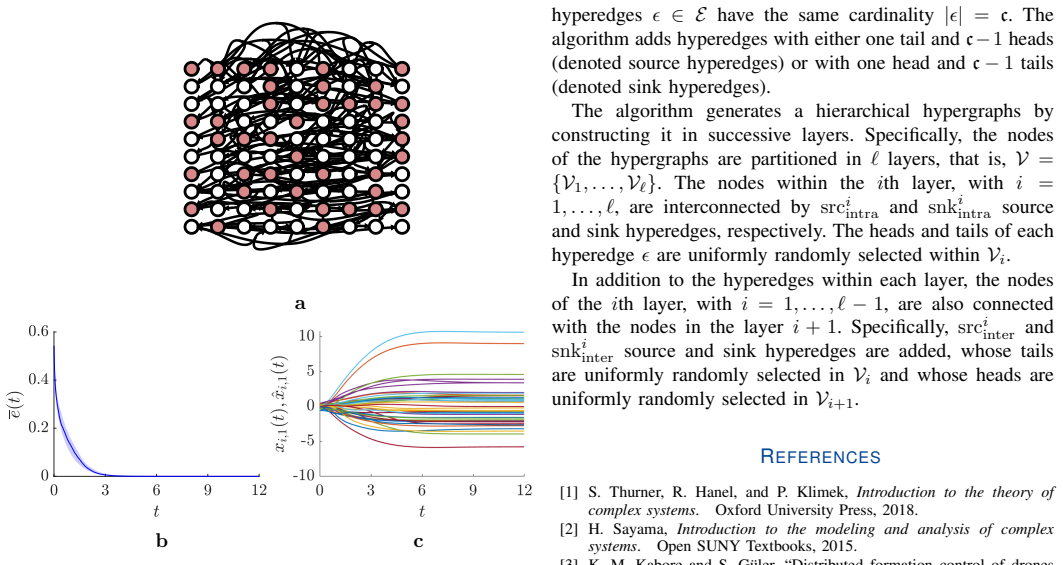
We consider the problem of reconstructing the state of a network of nonlinear dynamical systems in the presence of directed higher-order interactions. Grounded on analytical convergence results, we propose an algorithmic observer design procedure that simultaneously selects the nodes to be measured and the observer gains. We complement the theoretical analysis with an exhaustive numerical investigation campaign that showcases the performance and robustness of the designed observer. Finally, the algorithmic procedure is used to fully reconstruct the opinions of a group of agents.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper considers state reconstruction for networks of nonlinear dynamical systems with directed higher-order interactions. It proposes an algorithmic procedure that jointly selects measurement nodes and designs observer gains, grounded on analytical convergence results. The approach is supported by an exhaustive numerical campaign demonstrating performance and robustness, and is applied to reconstruct opinions in a multi-agent system.
Significance. If the convergence guarantees hold for the stated class of systems, the work provides a systematic, algorithmic route to observer design that extends beyond standard pairwise network models. The combination of analytical grounding, numerical validation across multiple examples, and a concrete application to opinion dynamics constitutes a solid contribution to networked systems theory and control.
major comments (2)
- [§3] §3 (Observer Design and Convergence): The central algorithmic procedure relies on analytical convergence results, yet the manuscript does not explicitly state or verify the incremental stability/Lipschitz conditions required on the higher-order interaction functions with respect to the selected measurement nodes. Without these bounds being made precise and shown to be independent of the specific directed hypergraph, the guarantee that the procedure works for arbitrary directed higher-order interactions is not fully supported.
- [§5] §5 (Numerical Validation): The reported simulations demonstrate performance on chosen examples but contain no systematic ablation that increases the magnitude of higher-order couplings or deliberately approaches the boundary of any implicit Lipschitz/passivity assumptions. This leaves open whether the observed convergence is robust or merely holds inside the regime where the unstated conditions are comfortably satisfied.
minor comments (2)
- [Abstract] The abstract and introduction could more clearly delineate which parts of the convergence analysis are novel versus extensions of prior pairwise-interaction results.
- [§2] Notation for higher-order interaction tensors should be introduced with an explicit example (e.g., a small directed hypergraph) to aid readability.
Simulated Author's Rebuttal
We thank the referee for the positive evaluation of our work and for the constructive major comments, which will help improve the clarity and completeness of the manuscript. We address each point below and indicate the revisions we will make.
read point-by-point responses
-
Referee: [§3] §3 (Observer Design and Convergence): The central algorithmic procedure relies on analytical convergence results, yet the manuscript does not explicitly state or verify the incremental stability/Lipschitz conditions required on the higher-order interaction functions with respect to the selected measurement nodes. Without these bounds being made precise and shown to be independent of the specific directed hypergraph, the guarantee that the procedure works for arbitrary directed higher-order interactions is not fully supported.
Authors: We agree that explicit statement of these conditions will strengthen the presentation. The convergence analysis in Section 3 is based on the standard incremental stability framework for nonlinear systems, under which the higher-order interaction functions are assumed to satisfy a uniform Lipschitz condition with respect to the measured states. In the revised manuscript we will add a new Assumption 3 that precisely formulates the required incremental stability and Lipschitz bounds, explicitly noting that the constants are independent of the particular directed hypergraph. We will also insert a short verification step in the proof of Theorem 1 showing that the bounds hold for any choice of measurement nodes selected by the algorithm. These additions will make the applicability to arbitrary directed higher-order interactions fully rigorous under the stated assumptions. revision: yes
-
Referee: [§5] §5 (Numerical Validation): The reported simulations demonstrate performance on chosen examples but contain no systematic ablation that increases the magnitude of higher-order couplings or deliberately approaches the boundary of any implicit Lipschitz/passivity assumptions. This leaves open whether the observed convergence is robust or merely holds inside the regime where the unstated conditions are comfortably satisfied.
Authors: We appreciate the suggestion to strengthen the numerical evidence. While the existing campaign already varies coupling strengths across several examples, we acknowledge that a more systematic ablation study is warranted. In the revised Section 5 we will add two new sets of experiments: (i) a parametric sweep that monotonically increases the magnitude of the higher-order coupling coefficients while keeping all other parameters fixed, and (ii) test cases deliberately tuned close to the boundary of the Lipschitz constants identified in the new Assumption 3. These results will be reported with quantitative metrics (convergence time and steady-state error) to demonstrate robustness beyond the comfortably satisfied regime. revision: yes
Circularity Check
No circularity: derivation grounded on independent analytical results
full rationale
The paper derives an algorithmic observer design procedure from analytical convergence results for nonlinear networks with directed higher-order interactions. These results are presented as obtained from the system dynamics and Lyapunov-style analysis rather than from fitted parameters, self-referential definitions, or load-bearing self-citations. The numerical campaign and opinion reconstruction example function as validation and application, not as inputs that the theory reduces to by construction. No steps match the enumerated circularity patterns.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclearWe study the stability properties of the linearized error dynamics... V = 1/2 e_S^T P_S(t) e_S ... d1(t) = 2(1-ς_S)σ(Q_S)/ξ²
-
IndisputableMonolith/Foundation/AbsoluteFloorClosure.leanabsolute_floor_iff_bare_distinguishability unclearIf A_sym_S(t) has a uniform Hurwitz margin... then the error e_sj(t) locally asymptotically converges to zero
Reference graph
Works this paper leans on
-
[1]
S. Thurner, R. Hanel, and P. Klimek,Introduction to the theory of complex systems. Oxford University Press, 2018
work page 2018
-
[2]
Sayama,Introduction to the modeling and analysis of complex systems
H. Sayama,Introduction to the modeling and analysis of complex systems. Open SUNY Textbooks, 2015
work page 2015
-
[3]
Distributed formation control of drones with onboard perception,
K. M. Kabore and S. G ¨uler, “Distributed formation control of drones with onboard perception,”IEEE/ASME Transactions on Mechatronics, vol. 27, no. 5, pp. 3121–3131, 2021
work page 2021
-
[4]
Distributed control for geometric pattern formation of large-scale multirobot systems,
A. Giusti, G. C. Maffettone, D. Fiore, M. Coraggio, and M. di Bernardo, “Distributed control for geometric pattern formation of large-scale multirobot systems,”Frontiers in Robotics and AI, vol. 10, p. 1219931, 2023
work page 2023
-
[5]
Contrarian deterministic effects on opinion dynamics:“the hung elections scenario
S. Galam, “Contrarian deterministic effects on opinion dynamics:“the hung elections scenario”,”Physica A: Statistical Mechanics and its Applications, vol. 333, pp. 453–460, 2004
work page 2004
-
[6]
Quantitative agent based model of opinion dynamics: Polish elections of 2015,
P. Sobkowicz, “Quantitative agent based model of opinion dynamics: Polish elections of 2015,”PloS one, vol. 11, no. 5, p. e0155098, 2016
work page 2015
-
[7]
Synchronization in complex oscillator networks and smart grids,
F. D ¨orfler, M. Chertkov, and F. Bullo, “Synchronization in complex oscillator networks and smart grids,”Proceedings of the National Academy of Sciences, vol. 110, no. 6, pp. 2005–2010, 2013
work page 2005
-
[8]
Complex networks: Structure and dynamics,
S. Boccaletti, V . Latora, Y . Moreno, M. Chavez, and D.-U. Hwang, “Complex networks: Structure and dynamics,”Physics reports, vol. 424, no. 4-5, pp. 175–308, 2006
work page 2006
-
[9]
M. Newman, A.-L. Barab ´asi, and D. J. Watts,The structure and dynamics of networks. Princeton University Press, 2011
work page 2011
-
[10]
Bullo,Lectures on Network Systems
F. Bullo,Lectures on Network Systems. Kindle Direct Publishing,
- [11]
-
[12]
S. H. Strogatz, “Exploring complex networks,”Nature, vol. 410, no. 6825, pp. 268–276, 2001
work page 2001
-
[13]
K. J. Astr ¨om, P. Albertos, M. Blanke, A. Isidori, W. Schaufelberger, and R. Sanz,Control of complex systems. Springer Science & Business Media, 2011
work page 2011
-
[14]
Control principles of complex systems,
Y .-Y . Liu and A.-L. Barab´asi, “Control principles of complex systems,” Reviews of Modern Physics, vol. 88, no. 3, p. 035006, 2016
work page 2016
-
[15]
D. D. Siljak,Decentralized control of complex systems. Courier Corporation, 2011
work page 2011
-
[16]
Criteria for global pinning- controllability of complex networks,
M. Porfiri and M. Di Bernardo, “Criteria for global pinning- controllability of complex networks,”Automatica, vol. 44, no. 12, pp. 3100–3106, 2008
work page 2008
-
[17]
The partial pinning control strategy for large complex networks,
P. DeLellis, F. Garofalo, and F. Lo Iudice, “The partial pinning control strategy for large complex networks,”Automatica, vol. 89, pp. 111–116, 2018
work page 2018
-
[18]
Pinning control of complex networks via edge snapping,
P. DeLellis, M. di Bernardo, and M. Porfiri, “Pinning control of complex networks via edge snapping,”Chaos: An Interdisciplinary Journal of Nonlinear Science, vol. 21, no. 3, 2011
work page 2011
-
[19]
Spectrum of controlling and observing complex networks,
G. Yan, G. Tsekenis, B. Barzel, J.-J. Slotine, Y .-Y . Liu, and A.-L. Barab´asi, “Spectrum of controlling and observing complex networks,” Nature Physics, vol. 11, no. 9, pp. 779–786, 2015
work page 2015
-
[20]
Observability of complex systems,
Y .-Y . Liu, J.-J. Slotine, and A.-L. Barab ´asi, “Observability of complex systems,”Proceedings of the National Academy of Sciences, vol. 110, no. 7, pp. 2460–2465, 2013
work page 2013
-
[21]
Observability of network systems: A critical review of recent results,
A. N. Montanari and L. A. Aguirre, “Observability of network systems: A critical review of recent results,”Journal of Control, Automation and Electrical Systems, vol. 31, no. 6, pp. 1348–1374, 2020
work page 2020
-
[22]
On node controllability and observability in complex dynamical networks,
F. Lo Iudice, F. Sorrentino, and F. Garofalo, “On node controllability and observability in complex dynamical networks,”IEEE Control Systems Letters, vol. 3, no. 4, pp. 847–852, 2019
work page 2019
-
[23]
T. Hashimoto and T. Amemiya, “Controllability and observability of lin- ear time-invariant uncertain systems irrespective of bounds of uncertain parameters,”IEEE Transactions on Automatic Control, vol. 56, no. 8, pp. 1807–1817, 2010
work page 2010
-
[24]
Quantitative measure of observability for linear stochastic systems,
Y . Subasi and M. Demirekler, “Quantitative measure of observability for linear stochastic systems,”Automatica, vol. 50, no. 6, pp. 1669–1674, 2014
work page 2014
-
[25]
The observ- ability radius of networks,
G. Bianchin, P. Frasca, A. Gasparri, and F. Pasqualetti, “The observ- ability radius of networks,”IEEE Transactions on Automatic Control, vol. 62, no. 6, pp. 3006–3013, 2016
work page 2016
-
[26]
A symbolic network-based nonlinear theory for dynamical systems observability,
C. Letellier, I. Sendi ˜na-Nadal, E. Bianco-Martinez, and M. S. Baptista, “A symbolic network-based nonlinear theory for dynamical systems observability,”Scientific Reports, vol. 8, no. 1, p. 3785, 2018
work page 2018
-
[27]
Observability and controllability of nonlinear networks: The role of symmetry,
A. J. Whalen, S. N. Brennan, T. D. Sauer, and S. J. Schiff, “Observability and controllability of nonlinear networks: The role of symmetry,” Physical Review X, vol. 5, no. 1, p. 011005, 2015
work page 2015
-
[28]
A simple approach to distributed observer design for linear systems,
W. Han, H. L. Trentelman, Z. Wang, and Y . Shen, “A simple approach to distributed observer design for linear systems,”IEEE Transactions on Automatic Control, vol. 64, no. 1, pp. 329–336, 2018
work page 2018
-
[29]
Distributed observer and controller design for spatially interconnected systems,
X. Zhang, K. Hengster-Movri ´c, M. ˇSebek, W. Desmet, and C. Faria, “Distributed observer and controller design for spatially interconnected systems,”IEEE Transactions on Control Systems Technology, vol. 27, no. 1, pp. 1–13, 2017
work page 2017
-
[30]
Distributed observer- based cyber-security control of complex dynamical networks,
Y . Wan, J. Cao, G. Chen, and W. Huang, “Distributed observer- based cyber-security control of complex dynamical networks,”IEEE Transactions on Circuits and Systems I: Regular Papers, vol. 64, no. 11, pp. 2966–2975, 2017
work page 2017
-
[31]
Observer design for a class of complex networks with unknown topoloy,
P. Schmidt, J. A. Moreno, and A. Schaum, “Observer design for a class of complex networks with unknown topoloy,”IFAC Proceedings Volumes, vol. 47, no. 3, pp. 2812–2817, 2014
work page 2014
-
[32]
Z. Zhang, Y . Li, and J. Dong, “Intermediate observer-based robust dis- tributed fault estimation for a complex network of dynamical systems,” IEEE Transactions on Automation Science and Engineering, 2023
work page 2023
-
[33]
The structure and dynamics of networks with higher order interactions,
S. Boccaletti, P. De Lellis, C. Del Genio, K. Alfaro-Bittner, R. Criado, S. Jalan, and M. Romance, “The structure and dynamics of networks with higher order interactions,”Physics Reports, vol. 1018, pp. 1–64, 2023
work page 2023
-
[34]
The physics of higher-order interactions in complex systems,
F. Battiston, E. Amico, A. Barrat, G. Bianconi, G. Ferraz de Arruda, B. Franceschiello, I. Iacopini, S. K ´efi, V . Latora, Y . Morenoet al., “The physics of higher-order interactions in complex systems,”Nature Physics, vol. 17, no. 10, pp. 1093–1098, 2021
work page 2021
-
[35]
Higher order interactions destroy phase transitions in deffuant opinion dynamics model,
H. Schawe and L. Hern ´andez, “Higher order interactions destroy phase transitions in deffuant opinion dynamics model,”Communications Physics, vol. 5, no. 1, p. 32, 2022
work page 2022
-
[36]
Modeling and control of opinion dynamics in the presence of higher-order interactions,
R. Rizzello, F. Lo Iudice, and P. De Lellis, “Modeling and control of opinion dynamics in the presence of higher-order interactions,” in2024 IEEE Workshop on Complexity in Engineering (COMPENG). IEEE, 2024, pp. 1–5
work page 2024
-
[37]
Directed hypergraph- based models for the fault monitoring of chemical reaction kinetics,
H. Ajemni, R. El Harabi, and M. Abdelkrim, “Directed hypergraph- based models for the fault monitoring of chemical reaction kinetics,” International Journal of Computer Applications, vol. 166, no. 12, 2017
work page 2017
-
[38]
V . Mann and V . Venkatasubramanian, “AI-driven hypergraph network of organic chemistry: network statistics and applications in reaction classification,”Reaction Chemistry & Engineering, vol. 8, no. 3, pp. 619–635, 2023
work page 2023
-
[39]
A unified model for active battery equalization systems,
Q. Ouyang, N. Ghaeminezhad, Y . Li, T. Wik, and C. Zou, “A unified model for active battery equalization systems,”IEEE Transactions on Control Systems Technology, vol. 33, no. 2, pp. 685–699, 2024
work page 2024
-
[40]
Pinning control of hypergraphs,
P. De Lellis, F. Della Rossa, F. Lo Iudice, and D. Liuzza, “Pinning control of hypergraphs,”IEEE Control Systems Letters, vol. 7, pp. 691– 696, 2022
work page 2022
-
[41]
Emergence and control of synchronization in networks with directed many-body interactions,
F. Della Rossa, D. Liuzza, F. Lo Iudice, and P. De Lellis, “Emergence and control of synchronization in networks with directed many-body interactions,”Physical Review Letters, vol. 131, no. 20, p. 207401, 2023
work page 2023
-
[42]
New sufficient conditions for the stability of slowly varying linear systems,
F. Amato, G. Celentano, and F. Garofalo, “New sufficient conditions for the stability of slowly varying linear systems,”IEEE Transactions on Automatic Control, vol. 38, no. 9, pp. 1409–1411, 2002
work page 2002
-
[43]
Bounded partial pinning control of network dynamical systems,
F. Lo Iudice, F. Garofalo, and P. De Lellis, “Bounded partial pinning control of network dynamical systems,”IEEE Transactions on Control of Network Systems, vol. 10, no. 1, pp. 238–248, 2022
work page 2022
-
[44]
P. A. Sorokin,Social mobility. Harper & brothers, 1927
work page 1927
-
[45]
Social stratification in networks: insights from co-authorship networks,
Z. S. Jalali, J. Introne, and S. Soundarajan, “Social stratification in networks: insights from co-authorship networks,”Journal of the Royal Society Interface, vol. 20, no. 198, 2023
work page 2023
-
[46]
Stability of synchronization in simplicial complexes,
L. V . Gambuzza, F. Di Patti, L. Gallo, S. Lepri, M. Romance, R. Criado, M. Frasca, V . Latora, and S. Boccaletti, “Stability of synchronization in simplicial complexes,”Nature Communications, vol. 12, no. 1, p. 1255, 2021
work page 2021
-
[47]
Pinning control of chimera states in systems with higher-order interactions: R. muolo et al
R. Muolo, L. V . Gambuzza, H. Nakao, and M. Frasca, “Pinning control of chimera states in systems with higher-order interactions: R. muolo et al.”Nonlinear Dynamics, vol. 113, no. 20, pp. 28 233–28 255, 2025
work page 2025
-
[48]
Targeting the dynamics of complex networks,
R. Guti ´errez, I. Sendina-Nadal, M. Zanin, D. Papo, and S. Boccaletti, “Targeting the dynamics of complex networks,”Scientific Reports, vol. 2, no. 1, p. 396, 2012
work page 2012
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.