Recognition: 3 theorem links
· Lean TheoremEquivariant Observer Design on SL(3) for Image Intensity-Based Homography Estimation
Pith reviewed 2026-05-12 04:46 UTC · model grok-4.3
The pith
Nonlinear observer on SL(3) estimates homography directly from image intensities with local exponential convergence.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central discovery is that an equivariant nonlinear observer on the special linear group SL(3) can achieve local exponential convergence for homography estimation by minimizing a cost function defined on image pixel intensities, provided the cost is non-degenerate, with conditions derived to characterize degenerate configurations, and a Hessian-augmented variant offered to improve the rate of convergence.
What carries the argument
Equivariant observer on SL(3) driven by the gradient of an image intensity-based cost function for direct homography estimation.
If this is right
- The observer error converges locally exponentially to zero under the stated conditions.
- Degenerate image configurations can be identified and avoided to ensure observability.
- The second-order observer variant accelerates convergence by incorporating second-derivative information.
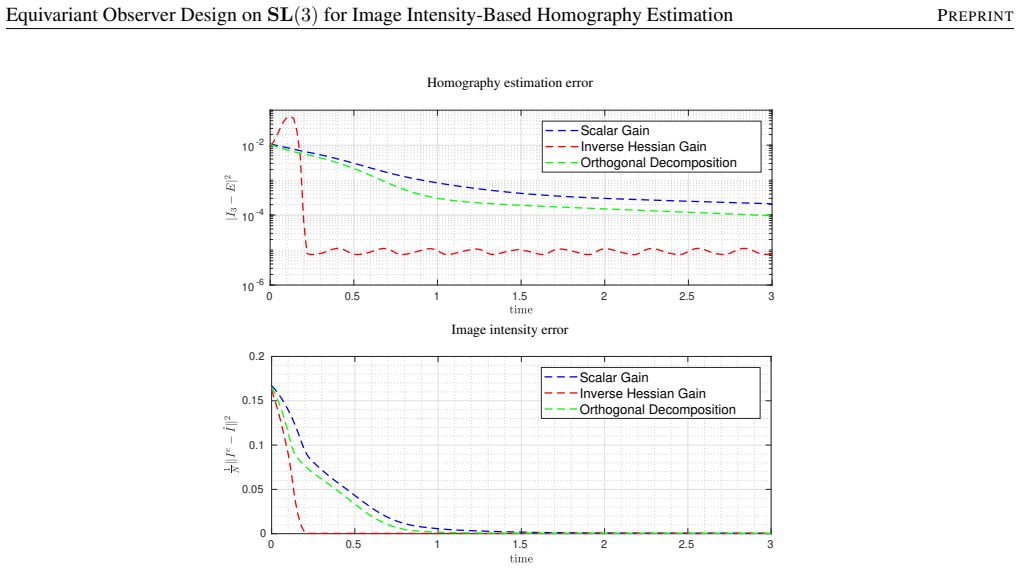
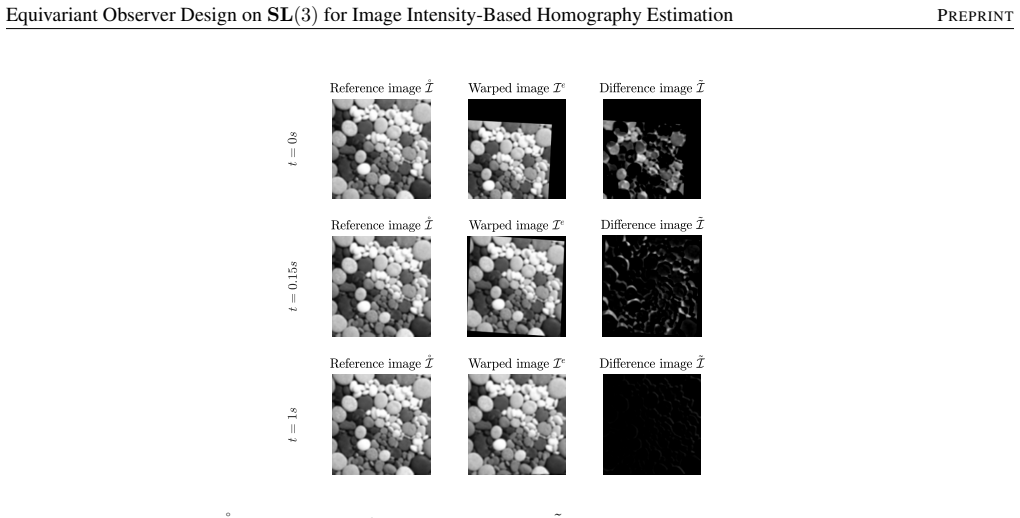
- Simulation results confirm effective performance on real-world image data.
Where Pith is reading between the lines
- This method might allow homography estimation in texture-poor but structured scenes if the non-degeneracy conditions can be relaxed.
- Integration with other vision tasks could benefit from the Lie group structure preserving equivariance.
- The approach suggests potential for extending intensity-based observers to other geometric estimation problems in computer vision.
Load-bearing premise
The cost function based on image intensities must be non-degenerate, which requires sufficient variation in the scene to distinguish different homographies.
What would settle it
A counterexample would be an image sequence where the observer fails to converge exponentially despite satisfying the paper's non-degeneracy conditions on the intensity cost.
Figures
read the original abstract
This paper addresses the problem of homography estimation using a nonlinear observer designed on the Lie group $\mathbf{SL}(3)$ that exploits the full image information through direct image registration. Unlike traditional feature-based methods, which rely on extensive feature extraction and matching, the proposed approach formulates an observer that minimises a cost function defined directly in terms of image pixel intensities. Explicit conditions ensuring the non-degeneracy of the cost function are derived, and a comprehensive analysis is conducted to characterise and generate degenerate (unobservable) image configurations. Theoretical results demonstrate local exponential convergence of the observer. To improve local convergence properties, a second-order observer variant is introduced by incorporating the Hessian of the cost function into the correction term. Simulation results demonstrate the performance of the proposed solutions on real images.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes an equivariant nonlinear observer on the Lie group SL(3) for homography estimation that directly registers image pixel intensities rather than relying on extracted features. It derives explicit non-degeneracy conditions for the intensity-based cost function, characterizes degenerate (unobservable) image configurations, establishes local exponential convergence of the observer, introduces a second-order variant that incorporates the Hessian into the correction term, and validates the approach via simulations on real images.
Significance. If the local exponential stability result holds under the stated non-degeneracy conditions, the work provides a theoretically grounded direct-image alternative to feature-based homography methods, which could improve robustness in texture-rich scenes for applications in robotics and computer vision. The explicit treatment of degenerate configurations and the Hessian-based second-order extension are constructive contributions that align with standard Lie-group observer techniques.
major comments (1)
- [Abstract] The abstract states that a second-order observer variant is introduced by incorporating the Hessian of the cost function, yet provides no stability analysis or convergence proof for this variant. This is load-bearing for the claim of improved local convergence properties and should be addressed with a dedicated theorem or section detailing the modified error dynamics and Lyapunov analysis.
minor comments (1)
- The abstract would benefit from a brief mention of the observer gain structure or the explicit form of the innovation term to give readers immediate context for the claimed local exponential convergence.
Simulated Author's Rebuttal
We thank the referee for the positive evaluation and the constructive comment on the second-order observer. We address the point below and will revise the manuscript accordingly.
read point-by-point responses
-
Referee: [Abstract] The abstract states that a second-order observer variant is introduced by incorporating the Hessian of the cost function, yet provides no stability analysis or convergence proof for this variant. This is load-bearing for the claim of improved local convergence properties and should be addressed with a dedicated theorem or section detailing the modified error dynamics and Lyapunov analysis.
Authors: We agree that the stability analysis for the second-order variant is missing and that it is required to substantiate the claim of improved local convergence. In the revised version we will add a dedicated subsection (following the first-order analysis) that derives the modified error dynamics when the Hessian of the cost function is incorporated into the correction term. Under the same non-degeneracy conditions already stated in the paper, we will prove local exponential convergence via a Lyapunov function whose derivative is rendered negative definite by the positive-definiteness of the Hessian on the tangent space. A new theorem statement and proof sketch will be included. revision: yes
Circularity Check
No significant circularity detected
full rationale
The derivation relies on standard Lie-group observer design applied to SL(3) with an image-intensity cost function; non-degeneracy conditions and local exponential stability are obtained from first-principles analysis of the cost and its Hessian without any reduction of outputs to fitted inputs or load-bearing self-citation chains. The approach is self-contained against external benchmarks of equivariant observer theory and direct registration methods.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The image intensity function is sufficiently rich to make the cost non-degenerate under stated conditions.
Lean theorems connected to this paper
-
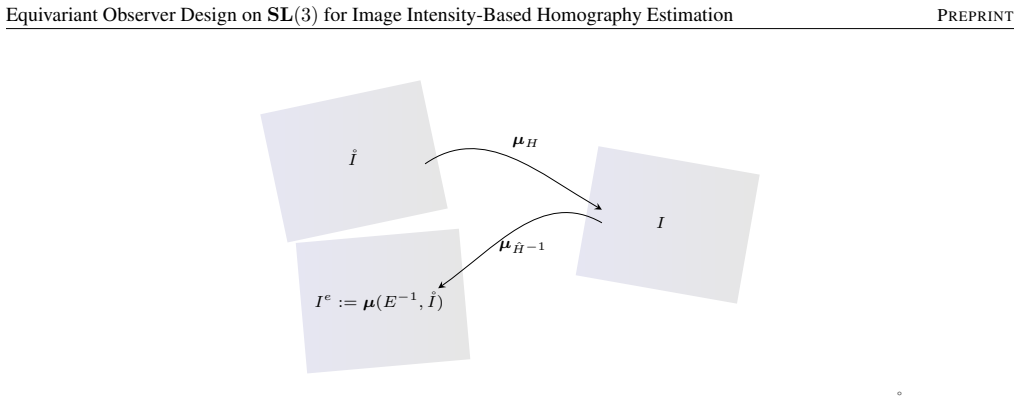
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclearDefine the photometric cost function C(Ĥ,I):=½∥Ie−˚I∥² = ½∫X(μ(Ĥ⁻¹,I)(x)−˚I(x))² dVg (Eq. 13-14). Correction term Δ obtained from gradient flow of C.
-
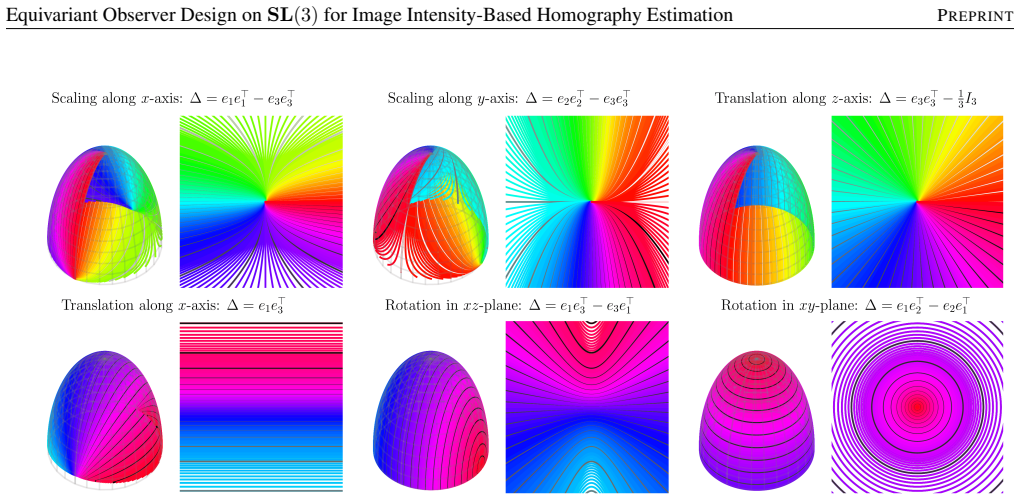
IndisputableMonolith/Foundation/BranchSelection.leanbranch_selection unclearNon-degeneracy: Hessian D²₁C(I₃,˚I)[Δ,Δ]=∫X⟨∇˚I(x)x⊤,Δ⟩² dVg >0 iff stabμ(˚I) is discrete (Lemma 2-3).
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclearObserver ˙Ĥ=ĤU+ΔĤ with Δ=kΔ∫ r(x)∇Ie(x)x⊤ dVg; local exponential stability proved via linearisation and positive-definite C⋆C.
Reference graph
Works this paper leans on
-
[1]
Multiple view geometry in computer vision , author=. 2003 , publisher=
work page 2003
-
[2]
An invitation to 3-d vision: from images to geometric models , author=. 2004 , publisher=
work page 2004
-
[3]
European conference on computer vision , pages=
LSD-SLAM: Large-scale direct monocular SLAM , author=. European conference on computer vision , pages=. 2014 , organization=
work page 2014
-
[4]
2015 IEEE/RSJ international conference on intelligent robots and systems (IROS) , pages=
Large-scale direct SLAM with stereo cameras , author=. 2015 IEEE/RSJ international conference on intelligent robots and systems (IROS) , pages=. 2015 , organization=
work page 2015
-
[5]
2011 IEEE intelligent vehicles symposium (IV) , pages=
Stereoscan: Dense 3d reconstruction in real-time , author=. 2011 IEEE intelligent vehicles symposium (IV) , pages=. 2011 , organization=
work page 2011
- [6]
-
[7]
2014 IEEE international conference on robotics and automation (ICRA) , pages=
SVO: Fast semi-direct monocular visual odometry , author=. 2014 IEEE international conference on robotics and automation (ICRA) , pages=. 2014 , organization=
work page 2014
-
[8]
2013 IEEE international conference on robotics and automation , pages=
Robust odometry estimation for RGB-D cameras , author=. 2013 IEEE international conference on robotics and automation , pages=. 2013 , organization=
work page 2013
-
[9]
The International Journal of Robotics Research , volume=
Homography-based 2d visual tracking and servoing , author=. The International Journal of Robotics Research , volume=. 2007 , publisher=
work page 2007
-
[10]
IEEE Transactions on Robotics and Automation , volume=
2 1/2 D visual servoing , author=. IEEE Transactions on Robotics and Automation , volume=. 1999 , publisher=
work page 1999
-
[11]
International Journal of Control , volume=
Nonlinear complementary filters on the special linear group , author=. International Journal of Control , volume=. 2012 , publisher=
work page 2012
-
[12]
2011 50th IEEE Conference on Decision and Control and European Control Conference , pages=
Homography estimation on the special linear group based on direct point correspondence , author=. 2011 50th IEEE Conference on Decision and Control and European Control Conference , pages=. 2011 , organization=
work page 2011
-
[13]
Proceedings IEEE Workshop on Representation of Visual Scenes (In Conjunction with ICCV'95) , pages=
Direct methods for visual scene reconstruction , author=. Proceedings IEEE Workshop on Representation of Visual Scenes (In Conjunction with ICCV'95) , pages=. 1995 , organization=
work page 1995
-
[14]
International Journal of Computer Vision , volume=
Construction of panoramic image mosaics with global and local alignment , author=. International Journal of Computer Vision , volume=. 2002 , publisher=
work page 2002
-
[15]
International journal of computer vision , volume=
Lucas-kanade 20 years on: A unifying framework , author=. International journal of computer vision , volume=. 2004 , publisher=
work page 2004
-
[16]
2007 IEEE Conference on Computer Vision and Pattern Recognition , pages=
Real-time visual tracking under arbitrary illumination changes , author=. 2007 IEEE Conference on Computer Vision and Pattern Recognition , pages=. 2007 , organization=
work page 2007
-
[17]
2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)(IEEE Cat
Real-time image-based tracking of planes using efficient second-order minimization , author=. 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)(IEEE Cat. No. 04CH37566) , volume=. 2004 , organization=
work page 2004
-
[18]
International Journal of Computer Vision , volume=
Multiple view geometry of general algebraic curves , author=. International Journal of Computer Vision , volume=. 2004 , publisher=
work page 2004
-
[19]
Centre for Visual Information Technology, Tech
A survey of planar homography estimation techniques , author=. Centre for Visual Information Technology, Tech. Rep. IIIT/TR/2005/12 , year=
work page 2005
-
[20]
Homography estimation from planar contours , author=. Third International Symposium on 3D Data Processing, Visualization, and Transmission (3DPVT'06) , pages=. 2006 , organization=
work page 2006
-
[21]
2006 IEEE/RSJ International Conference on Intelligent Robots and Systems , pages=
Homography-based tracking for central catadioptric cameras , author=. 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems , pages=. 2006 , organization=
work page 2006
-
[22]
Robotics Institute, Pittsburgh, PA, Tech
Parameterizing homographies , author=. Robotics Institute, Pittsburgh, PA, Tech. Rep. CMU-RI-TR-06-11 , year=
-
[23]
IJCAI'81: 7th international joint conference on Artificial intelligence , volume=
An iterative image registration technique with an application to stereo vision , author=. IJCAI'81: 7th international joint conference on Artificial intelligence , volume=
-
[24]
Proceedings of the 2001 IEEE Computer Society Conference on Computer Vision and Pattern Recognition
Equivalence and efficiency of image alignment algorithms , author=. Proceedings of the 2001 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. CVPR 2001 , volume=. 2001 , organization=
work page 2001
-
[25]
Image alignment and stitching: A tutorial , author=. Foundations and Trends. 2007 , publisher=
work page 2007
-
[26]
International Workshop on Vision Algorithms , pages=
About direct methods , author=. International Workshop on Vision Algorithms , pages=. 1999 , organization=
work page 1999
-
[27]
Sixth International Conference on Computer Vision (IEEE Cat
Construction and refinement of panoramic mosaics with global and local alignment , author=. Sixth International Conference on Computer Vision (IEEE Cat. No. 98CH36271) , pages=. 1998 , organization=
work page 1998
-
[28]
2002 International Conference on Pattern Recognition , volume=
Real-time tracking and estimation of plane pose , author=. 2002 International Conference on Pattern Recognition , volume=. 2002 , organization=
work page 2002
-
[29]
IEEE Transactions on Robotics , volume=
Efficient homography-based tracking and 3-D reconstruction for single-viewpoint sensors , author=. IEEE Transactions on Robotics , volume=. 2008 , publisher=
work page 2008
-
[30]
Introduction to smooth manifolds , pages=
Smooth manifolds , author=. Introduction to smooth manifolds , pages=. 2003 , publisher=
work page 2003
- [31]
- [32]
-
[33]
Sobolev spaces on Riemannian manifolds , author=. 1996 , publisher=
work page 1996
-
[34]
arXiv preprint arXiv:2405.13322 , year=
The Meyers-Serrin theorem on Riemannian manifolds: a survey , author=. arXiv preprint arXiv:2405.13322 , year=
-
[35]
Matrix groups: An introduction to Lie group theory , author=. 2003 , publisher=
work page 2003
-
[36]
IFAC Proceedings Volumes , volume=
Observers for kinematic systems with symmetry , author=. IFAC Proceedings Volumes , volume=. 2013 , publisher=
work page 2013
-
[37]
Asian Journal of Control , volume=
Feature-based recursive observer design for homography estimation and its application to image stabilization , author=. Asian Journal of Control , volume=. 2019 , publisher=
work page 2019
-
[38]
Nonlinear observer design on SL (3) for homography estimation by exploiting point and line correspondences with application to image stabilization , author=. Automatica , volume=. 2020 , publisher=
work page 2020
-
[39]
2017 IEEE 56th Annual Conference on Decision and Control (CDC) , pages=
Explicit complementary observer design on special linear group sl (3) for homography estimation using conic correspondences , author=. 2017 IEEE 56th Annual Conference on Decision and Control (CDC) , pages=. 2017 , organization=
work page 2017
-
[40]
IEEE Robotics and Automation Letters , year=
Bayesian Filtering for Homography Estimation , author=. IEEE Robotics and Automation Letters , year=
-
[41]
2023 62nd IEEE Conference on Decision and Control (CDC) , pages=
Equivariant filter for feature-based homography estimation for general camera motion , author=. 2023 62nd IEEE Conference on Decision and Control (CDC) , pages=. 2023 , organization=
work page 2023
-
[42]
Nonlinear constructive observer design for direct homography estimation , author=. IFAC-PapersOnLine , volume=. 2023 , publisher=
work page 2023
-
[43]
IEEE transactions on robotics , volume=
Appearance-guided monocular omnidirectional visual odometry for outdoor ground vehicles , author=. IEEE transactions on robotics , volume=. 2008 , publisher=
work page 2008
-
[44]
Measure theory and fine properties of functions , author=. 2018 , publisher=
work page 2018
- [45]
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.