Recognition: no theorem link
VRA: Grounding Discrete-Time Joint Acceleration in Voltage-Constrained Actuation
Pith reviewed 2026-05-12 04:28 UTC · model grok-4.3
The pith
Commanded joint accelerations must be restricted to voltage-realizable values to be physically executable on electric actuators.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
VRA is a joint-level acceleration interface that grounds kinematic acceleration commands in voltage-constrained actuator physics by restricting them to the set of accelerations that the actuator voltage model can realize, thereby providing an execution abstraction that prevents physically impossible commands from reaching the hardware.
What carries the argument
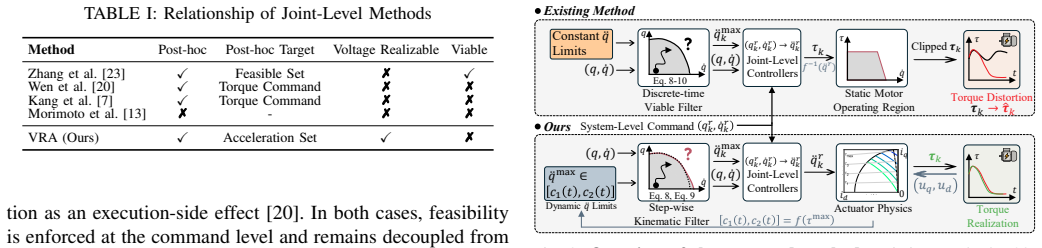
Voltage-Realizable Acceleration (VRA) interface, which derives per-joint acceleration bounds from the actuator's voltage dynamics model and clips incoming commands to those bounds.
If this is right
- Position and velocity limit enforcement becomes reliable because acceleration commands stay within actuator capabilities.
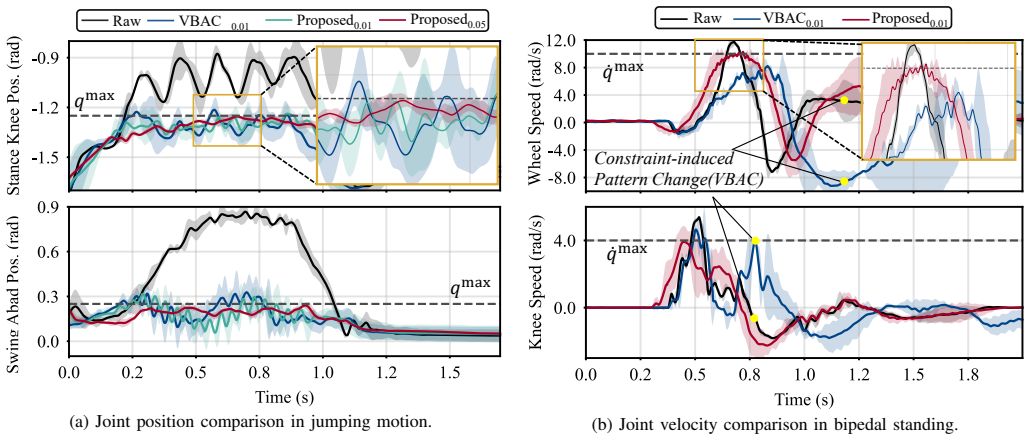
- Constraint-induced oscillations in closed-loop robot motion are reduced by removing the source of unachievable references.
- Acceleration-based controllers can safely operate closer to kinematic limits on voltage-driven hardware.
- The same bounding approach can be applied at the joint level across different electric actuator platforms.
Where Pith is reading between the lines
- VRA-style bounding could be extended to handle time-varying voltage limits such as battery discharge during long missions.
- Integrating VRA into whole-body controllers might improve stability margins in dynamic legged locomotion.
- The interface provides a natural place to add actuator-specific safety margins without altering higher-level planners.
Load-bearing premise
The voltage-constrained actuator model used to compute realizable accelerations accurately captures all relevant physical limits without significant unmodeled effects such as delays or friction.
What would settle it
Run the same kinematic trajectory once with VRA disabled and once enabled; the version without VRA will produce actuator voltage saturation or velocity overshoot on at least one joint where VRA would have reduced the commanded acceleration.
Figures



read the original abstract
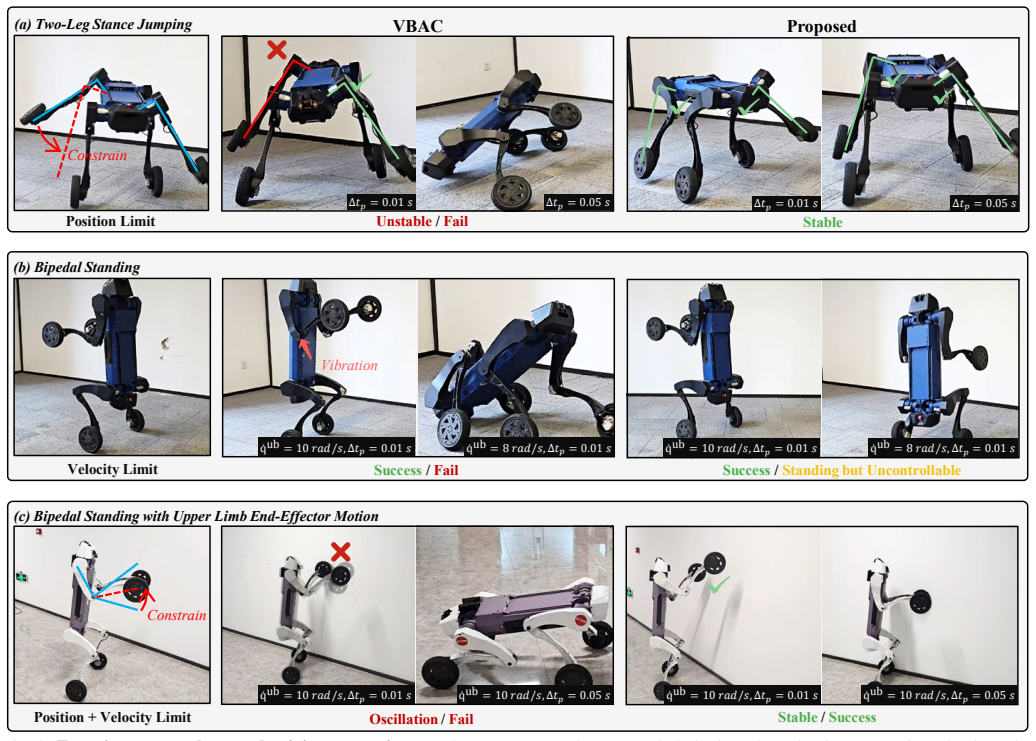
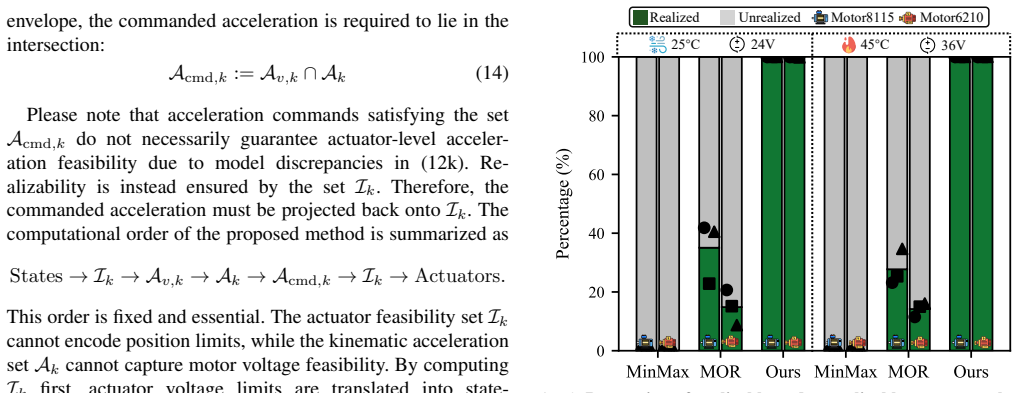
Discrete-time joint acceleration constraints are widely used to enforce position and velocity limits. However, under voltage-constrained electric actuators, kinematically admissible accelerations may be physically unrealizable, exposing a missing execution-level abstraction. We propose Voltage-Realizable Acceleration (VRA), a joint-level acceleration interface that grounds kinematic acceleration in voltage-constrained actuator physics by restricting commanded accelerations to voltage-realizable constraints. Hardware experiments on electric actuators and a wheel-legged quadruped show that VRA removes unrealizable accelerations, restores consistent near-constraint execution, and reduces constraint-induced oscillations.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes Voltage-Realizable Acceleration (VRA), a joint-level acceleration interface that restricts discrete-time kinematic acceleration commands to those physically realizable under voltage constraints of electric actuators. It identifies that standard kinematic limits can produce unrealizable commands and grounds accelerations in actuator voltage physics via a derived constraint. Hardware experiments on individual electric actuators and a wheel-legged quadruped are presented to demonstrate that VRA removes unrealizable accelerations, enables consistent near-constraint execution, and reduces constraint-induced oscillations.
Significance. If the VRA derivation is sound and the hardware results are reproducible, the work supplies a practical missing abstraction that bridges kinematic planning and low-level voltage actuation, which could improve reliability and reduce oscillations in constraint-based controllers for legged and mobile robots. The parameter-free grounding in basic actuator physics (voltage-to-torque relations) is a clear strength. However, the significance is limited by incomplete verification of the actuator model against full dynamics and the absence of detailed quantitative results or direct voltage measurements.
major comments (2)
- [§3] §3 (Actuator Model and VRA Derivation): The voltage-realizable acceleration bounds rely on a static voltage-to-torque mapping that omits the motor electrical time constant (L di/dt dynamics) and velocity-dependent friction. In discrete time, this risks permitting accelerations that still saturate the voltage supply during the sample interval, undermining the claim that VRA bounds are both necessary and sufficient for physical realizability.
- [Experimental Results] Experimental Results (quadruped section): The hardware trials on the wheel-legged quadruped report reduced oscillations and better constraint adherence, but provide no quantitative metrics (e.g., RMS tracking error, voltage saturation frequency), no direct comparison of model-predicted voltage trajectories against measured amplifier outputs, and no full methods or data. This leaves open whether improvements stem from correct realizability enforcement or from overly conservative limiting, weakening support for the central claim.
minor comments (2)
- [Abstract] The abstract would benefit from a brief quantitative statement of the observed improvements (e.g., percentage reduction in oscillations) to better convey the empirical gains.
- [Methods] Notation for the VRA constraint (e.g., the exact mapping from voltage limits to acceleration bounds) should be introduced with an explicit equation early in the methods to aid readability.
Simulated Author's Rebuttal
We thank the referee for the constructive review and for recognizing the potential of VRA as a practical abstraction. We address each major comment below, indicating planned revisions where appropriate. Our responses focus on clarifying assumptions, strengthening evidence, and maintaining the manuscript's core contribution without misrepresentation.
read point-by-point responses
-
Referee: [§3] §3 (Actuator Model and VRA Derivation): The voltage-realizable acceleration bounds rely on a static voltage-to-torque mapping that omits the motor electrical time constant (L di/dt dynamics) and velocity-dependent friction. In discrete time, this risks permitting accelerations that still saturate the voltage supply during the sample interval, undermining the claim that VRA bounds are both necessary and sufficient for physical realizability.
Authors: We agree that the derivation in §3 is based on a quasi-static voltage-to-torque relation derived from the steady-state actuator equation and does not incorporate the electrical time constant or velocity-dependent friction. This choice was made to yield a parameter-free interface grounded in basic physics, consistent with the paper's emphasis on simplicity for discrete-time kinematic commands. The referee is correct that, strictly speaking, the bounds are sufficient under the quasi-static assumption but may not be necessary in all discrete-time scenarios where transient dynamics could cause intra-sample saturation. In the revised manuscript we will add an explicit discussion paragraph in §3 stating the modeling assumptions, their validity range for typical motor electrical time constants relative to common sampling rates (e.g., 500–1000 Hz), and the resulting conservative character of the VRA bounds. We will also qualify the original claim to “sufficient for realizability under the stated quasi-static model” rather than asserting necessity and sufficiency in full dynamic generality. No change to the core VRA equations is required, as the approximation is standard and the hardware results remain valid under it. revision: partial
-
Referee: [Experimental Results] Experimental Results (quadruped section): The hardware trials on the wheel-legged quadruped report reduced oscillations and better constraint adherence, but provide no quantitative metrics (e.g., RMS tracking error, voltage saturation frequency), no direct comparison of model-predicted voltage trajectories against measured amplifier outputs, and no full methods or data. This leaves open whether improvements stem from correct realizability enforcement or from overly conservative limiting, weakening support for the central claim.
Authors: We concur that additional quantitative evidence would strengthen the experimental section. The current text prioritizes qualitative demonstration of oscillation reduction and constraint adherence to illustrate the interface’s practical effect. In the revision we will augment the quadruped results with RMS joint tracking error, the fraction of time steps exhibiting voltage saturation (computed from existing amplifier logs), and explicit comparison plots of model-predicted versus measured voltage trajectories. Full experimental methods, parameter values, and anonymized data will be provided in supplementary material. These additions will allow readers to evaluate whether the observed improvements derive from realizability enforcement rather than excessive conservatism. The individual-actuator experiments already contain direct voltage measurements that we will reference more prominently to support the model. revision: yes
Circularity Check
No circularity detected; VRA derived directly from actuator voltage physics
full rationale
The paper grounds VRA by deriving acceleration constraints from the voltage limits of electric actuators using standard physical relations (e.g., voltage-to-torque mapping). This is a forward application of actuator dynamics to restrict kinematic commands, with no steps that define the output in terms of itself, fit parameters to the target result, or rely on self-citation chains for the core claim. The derivation remains self-contained against external physical benchmarks and does not reduce to tautology or renaming.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Kinematically admissible accelerations may be physically unrealizable under voltage-constrained electric actuators
invented entities (1)
-
Voltage-Realizable Acceleration (VRA)
no independent evidence
Reference graph
Works this paper leans on
-
[2]
Aaron D. Ames, Jessy W. Grizzle, and Paulo Tabuada. Control barrier function based quadratic programs with application to adaptive cruise control. In53rd IEEE Conference on Decision and Control, pages 6271–6278,
-
[3]
doi: 10.1109/CDC.2014.7040372
- [4]
-
[5]
doi: 10.1109/28.845057
-
[6]
The mit humanoid robot: Design, motion planning, and control for acrobatic behaviors
Matthew Chignoli, Donghyun Kim, Elijah Stanger-Jones, and Sangbae Kim. The mit humanoid robot: Design, motion planning, and control for acrobatic behaviors. In2020 IEEE-RAS 20th International Conference on Humanoid Robots (Humanoids), pages 1–8, 2021. doi: 10.1109/HUMANOIDS47582.2021.9555782
-
[7]
Mohamed Djeha, Pierre Gergondet, and Abderrahmane Kheddar. Robust task-space quadratic programming for kinematic-controlled robots.IEEE Transactions on Robotics, 39(5):3857–3874, 2023. doi: 10.1109/TRO. 2023.3286069
work page doi:10.1109/tro 2023
-
[8]
Marco Faroni, Manuel Beschi, and Nicola Pedrocchi. Inverse kinematics of redundant manipulators with dy- namic bounds on joint movements.IEEE Robotics and Automation Letters, 5(4):6435–6442, 2020. doi: 10.1109/LRA.2020.3013879
-
[9]
Dongyun Kang, Gijeong Kim, JongHun Choe, Hajun Kim, and Hae-Won Park. Learning impact-rich rotational maneuvers via centroidal velocity rewards and sim-to- real techniques: A one-leg hopper flip case study, 2025. URL https://arxiv.org/abs/2505.12222
-
[10]
Mini cheetah: A platform for pushing the limits of dynamic quadruped control
Benjamin Katz, Jared Di Carlo, and Sangbae Kim. Mini cheetah: A platform for pushing the limits of dynamic quadruped control. In2019 International Conference on Robotics and Automation (ICRA), pages 6295–6301,
-
[11]
doi: 10.1109/ICRA.2019.8793865
-
[12]
Jeeseop Kim, Jaemin Lee, and Aaron D. Ames. Safety- critical coordination of legged robots via layered con- trollers and forward reachable set based control barrier functions. In2024 IEEE International Conference on Robotics and Automation (ICRA), pages 3478–3484,
-
[13]
doi: 10.1109/ICRA57147.2024.10610589
-
[14]
Omer Cihan Kivanc and Salih Baris Ozturk. Sensorless pmsm drive based on stator feedforward voltage esti- mation improved with mras multiparameter estimation. IEEE/ASME Transactions on Mechatronics, 23(3):1326– 1337, 2018. doi: 10.1109/TMECH.2018.2817246
-
[15]
Chunyan Lai, Guodong Feng, Kaushik Mukherjee, V oiko Loukanov, and Narayan C. Kar. Torque ripple modeling and minimization for interior pmsm considering mag- netic saturation.IEEE Transactions on Power Electron- ics, 33(3):2417–2429, 2018. doi: 10.1109/TPEL.2017. 2695440
-
[16]
In: 2023 IEEE/RSJ Interna- tionalConferenceonIntelligentRobotsandSystems(IROS).pp.7742–7749(2023)
Qiayuan Liao, Zhongyu Li, Akshay Thirugnanam, Jun Zeng, and Koushil Sreenath. Walking in narrow spaces: Safety-critical locomotion control for quadrupedal robots with duality-based optimization. In2023 IEEE/RSJ International Conference on Intelligent Robots and Sys- tems (IROS), pages 2723–2730, 2023. doi: 10.1109/ IROS55552.2023.10341896
-
[17]
S. Morimoto, Y . Takeda, T. Hirasa, and K. Taniguchi. Ex- pansion of operating limits for permanent magnet motor by current vector control considering inverter capacity. IEEE Transactions on Industry Applications, 26(5):866– 871, 1990. doi: 10.1109/28.60058
-
[18]
Romeo Orsolino, Michele Focchi, Carlos Mastalli, Hongkai Dai, Darwin G. Caldwell, and Claudio Semini. Application of wrench-based feasibility analysis to the online trajectory optimization of legged robots.IEEE Robotics and Automation Letters, 3(4):3363–3370, 2018. doi: 10.1109/LRA.2018.2836441
-
[19]
The enhanced compact qp method for redundant manipulators using practical inequality constraints
Ki Cheol Park, Pyung Hun Chang, and Seung Ho Kim. The enhanced compact qp method for redundant manipulators using practical inequality constraints. In Proceedings. 1998 IEEE International Conference on Robotics and Automation (Cat. No.98CH36146), vol- ume 1, pages 107–114 vol.1, 1998. doi: 10.1109/ROBOT. 1998.676327
-
[20]
Andrea Del Prete. Joint position and velocity bounds in discrete-time acceleration/torque control of robot ma- nipulators.IEEE Robotics and Automation Letters, 3(1): 281–288, 2018. doi: 10.1109/LRA.2017.2738321
-
[21]
Design of imc controller with anti-saturation for pmsm compressor system
Gao Qiang, Wang Wei, Ren Rongjie, and Xu Dianguo. Design of imc controller with anti-saturation for pmsm compressor system. In2008 IEEE V ehicle Power and Propulsion Conference, pages 1–5, 2008. doi: 10.1109/ VPPC.2008.4677588
-
[22]
Young-Ha Shin, Tae-Gyu Song, Gwanghyeon Ji, and Hae-Won Park. Reinforcement learning for high- speed quadrupedal locomotion with motor operating re- gion constraints: Mitigating motor model discrepancies through torque clipping in realistic motor operating re- gion.IEEE Robotics and Automation Magazine, 32(2): 49–59, 2025. doi: 10.1109/MRA.2024.3487322
-
[23]
Russ Tedrake.Underactuated Robotics. 2023. URL https://underactuated.csail.mit.edu
work page 2023
-
[24]
Changyun Wen, Jing Zhou, Zhitao Liu, and Hongye Su. Robust adaptive control of uncertain nonlinear systems in the presence of input saturation and external disturbance. IEEE Transactions on Automatic Control, 56(7):1672– 1678, 2011. doi: 10.1109/TAC.2011.2122730
-
[25]
Mohammad Hasan Yeganegi, Majid Khadiv, Andrea Del Prete, S. Ali A. Moosavian, and Ludovic Righetti. Robust walking based on mpc with viability guarantees.IEEE Transactions on Robotics, 38(4):2389–2404, 2022. doi: 10.1109/TRO.2021.3127388
-
[26]
Dehai Yu, Weiwei Sun, Xiangyu Chen, and Mingyuan Du. Anti-saturation coordination control of permanent magnet synchronous wind power system.IEEE Access, 11:33428–33441, 2023. doi: 10.1109/ACCESS.2023. 3263481
-
[27]
Yachen Zhang and Ryo Kikuuwe. Ensuring viability: A QP-based inverse kinematics for handling joint range, velocity and acceleration limits, as well as whole-body collision avoidance. 2025. doi: 10.51094/jxiv.1053
-
[28]
Viability-preserving passive torque control, 2025
Zizhe Zhang, Yicong Wang, Zhiquan Zhang, Tianyu Li, and Nadia Figueroa. Viability-preserving passive torque control, 2025. URL https://arxiv.org/abs/2510.03367
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.