Recognition: 1 theorem link
· Lean TheoremSafe Aerial 3D Path Planning for Autonomous UAVs using Magnetic Potential Fields
Pith reviewed 2026-05-12 03:58 UTC · model grok-4.3
The pith
A 3D extension of magnetic potential fields via convolutional autoencoders generates collision-free UAV paths in urban environments at 100% success rate without retraining.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
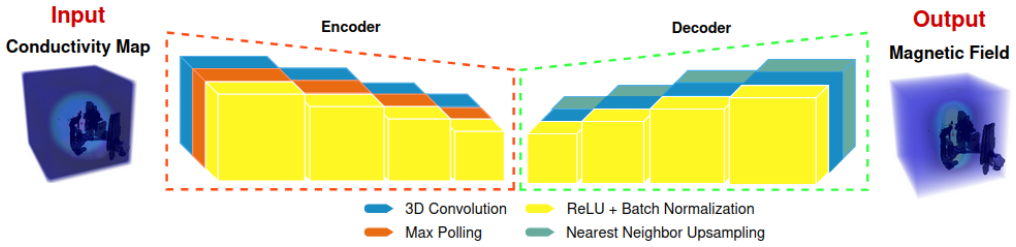
The 3DMaxConvNet predicts 3D magnetic potential fields from LiDAR voxel grids so that the UAV follows gradient descent to the goal; because the underlying field obeys Maxwell's equations, no spurious local minima appear, and the autoencoder generalizes across maps to deliver collision-free trajectories.
What carries the argument
The 3DMaxConvNet convolutional autoencoder that outputs 3D magnetic potential fields from 101^3 voxel grids, inheriting the no-local-minima property of the 2D Maxwell-based planner.
If this is right
- Real-time 3D path planning becomes feasible for UAVs in dense city settings because planning time drops below 0.1 seconds.
- The same trained model works on both dense night-time cityscapes and suburban districts without any retraining step.
- Path lengths remain comparable to A* while runtime improves by a factor of 1.7 to 1.95.
- Path quality stays similar to RRT* while runtime improves by a factor of roughly 200.
- Closed-loop control stays safe across randomized start and goal positions in unseen maps.
Where Pith is reading between the lines
- If the voxel-grid representation can be updated from onboard sensors at similar speed, the planner could support continuous replanning during flight.
- The approach may reduce energy use on long flights by producing smoother trajectories than sampling-based planners.
- Similar autoencoder-based field prediction could be tested on ground robots operating in cluttered 3D spaces such as warehouses.
- Adding dynamic obstacles would require only extending the autoencoder input to include velocity channels.
Load-bearing premise
The 3D version of the magnetic potential field still has no local minima and the autoencoder generalizes from its training data to produce safe paths on entirely new maps even when real sensor noise is present.
What would settle it
A single trial in a third urban environment that includes realistic LiDAR noise where the UAV either collides or becomes trapped would show the generalization and no-minima claims do not hold.
Figures




read the original abstract
Safe autonomous Uncrewed Aerial Vehicle (UAV) navigation in urban environments requires real-time path planning that avoids obstacles. MaxConvNet is a potential-field planner that leverages properties of Maxwell's equations to generate a path to the goal without local minima. We extend the 2D MaxConvNet magnetic field planner to 3D, using a convolutional autoencoder to predict obstacle-aware potential fields from LiDAR-derived 101^3 voxel grids. Evaluation across 100 randomized closed-loop trials in two distinct Cosys-AirSim urban environments, a dense night-time cityscape and a suburban district shows a 100% path planning success rate on both maps without retraining. In offline path planning, 3DMaxConvNet produces path lengths comparable to A* on unseen maps while reducing runtime from 0.155--0.17s to 0.087--0.089s, or about 1.7--1.95 times faster than A*. Against RRT*(3k), 3DMaxConvNet achieves similar path quality while reducing planning runtime from 17.2--17.5s to about 0.09s, which is roughly 193--201 times faster than RRT*(3k).
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes 3DMaxConvNet, an extension of the 2D MaxConvNet planner that uses magnetic potential fields derived from Maxwell's equations to generate collision-free paths without local minima. It replaces explicit field computation with a convolutional autoencoder that predicts 3D potential fields from 101³ LiDAR voxel grids, and evaluates the approach in Cosys-AirSim simulation, claiming 100% success across 100 randomized closed-loop trials on two unseen urban maps, path lengths comparable to A*, and runtime reductions of 1.7–1.95× versus A* and ~200× versus RRT*(3k).
Significance. If the 3D magnetic field truly inherits the no-local-minima guarantee and the autoencoder generalizes reliably, the method would offer a theoretically grounded, fast alternative to sampling- or search-based planners for real-time 3D UAV navigation in cluttered environments. The reported speed-ups on unseen maps and the use of a learned surrogate for the potential field are practically relevant strengths.
major comments (3)
- [Section 3 (3D field formulation)] The manuscript asserts that the 3D extension of the Maxwell-derived magnetic potential preserves the 2D no-local-minima property, yet provides no derivation or analysis of the curl/divergence conditions in three dimensions that would guarantee a single attracting basin. This assumption is load-bearing for both the safety claim and the reported 100% success rate.
- [Section 4 (network architecture and training)] No description is given of the autoencoder training distribution, validation splits, data augmentation, or failure cases (e.g., overhanging obstacles or narrow passages). Without these details the claim that the network produces collision-free fields on two entirely unseen Cosys-AirSim maps cannot be evaluated for generalization.
- [Section 5 (experimental results)] The evaluation reports 100% success in 100 closed-loop trials but supplies neither statistical measures (confidence intervals, variance across runs) nor an analysis of edge-case failures. This weakens the empirical support for the central performance claims relative to A* and RRT*.
minor comments (2)
- [Abstract and title] The abstract and title use slightly inconsistent naming ('MaxConvNet' vs. '3DMaxConvNet'); standardize terminology.
- [Figures 4–6] Figure captions and axis labels in the results section would benefit from explicit units and clearer indication of which metric corresponds to which baseline.
Simulated Author's Rebuttal
We thank the referee for their constructive comments on our manuscript. We address each major point below and will revise the paper accordingly to strengthen the theoretical and empirical support.
read point-by-point responses
-
Referee: [Section 3 (3D field formulation)] The manuscript asserts that the 3D extension of the Maxwell-derived magnetic potential preserves the 2D no-local-minima property, yet provides no derivation or analysis of the curl/divergence conditions in three dimensions that would guarantee a single attracting basin. This assumption is load-bearing for both the safety claim and the reported 100% success rate.
Authors: We agree that an explicit derivation would strengthen the paper. The no-local-minima property follows from the fact that the magnetic scalar potential satisfies Laplace's equation in free space (∇²φ = 0), which holds in both 2D and 3D by the divergence-free and curl-free nature of the magnetic field away from sources. By the maximum principle for harmonic functions, the potential has no local minima in the domain. We will add a concise derivation and discussion of the 3D curl and divergence conditions to Section 3 in the revised manuscript. revision: yes
-
Referee: [Section 4 (network architecture and training)] No description is given of the autoencoder training distribution, validation splits, data augmentation, or failure cases (e.g., overhanging obstacles or narrow passages). Without these details the claim that the network produces collision-free fields on two entirely unseen Cosys-AirSim maps cannot be evaluated for generalization.
Authors: We acknowledge the need for more details on the training process to allow proper evaluation of generalization. The revised Section 4 will include a description of the training dataset (generated from simulated voxel grids of urban environments), the train/validation split used, data augmentation strategies (such as random rotations and translations), and an analysis of observed failure modes during training, including performance on challenging configurations like overhanging obstacles and narrow passages. revision: yes
-
Referee: [Section 5 (experimental results)] The evaluation reports 100% success in 100 closed-loop trials but supplies neither statistical measures (confidence intervals, variance across runs) nor an analysis of edge-case failures. This weakens the empirical support for the central performance claims relative to A* and RRT*.
Authors: We appreciate this observation. Although no failures occurred in the 100 trials, we will enhance the experimental section by adding statistical measures such as confidence intervals for the success rate and runtime comparisons, reporting variance in path lengths and planning times across trials, and including a brief discussion of edge cases or near-miss scenarios observed in the simulations to provide a more robust empirical analysis. revision: yes
Circularity Check
No significant circularity; derivation is self-contained against external benchmarks
full rationale
The paper extends a prior 2D magnetic potential field method (based on Maxwell's equations) to 3D via a convolutional autoencoder trained on 101^3 voxel grids derived from LiDAR. Path planning success is evaluated empirically through 100 closed-loop trials on two unseen Cosys-AirSim maps, with runtime and path quality compared directly to independent baselines A* and RRT*. No load-bearing step reduces by construction to fitted parameters, self-definitional loops, or unverified self-citations; the no-local-minima property is invoked as an extension but the 100% success and speedup claims rest on simulation results external to the training distribution. The derivation chain therefore stands on independent empirical validation rather than tautological reduction.
Axiom & Free-Parameter Ledger
free parameters (1)
- autoencoder model weights
axioms (1)
- domain assumption Properties of Maxwell's equations that prevent local minima in 2D magnetic fields extend directly to 3D path planning.
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We extend the 2D MaxConvNet magnetic field planner to 3D, using a convolutional autoencoder to predict obstacle-aware potential fields from LiDAR-derived 101^3 voxel grids.
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Real-Time Obstacle Avoidance for Manipulators and Mobile Robots
O. Khatib, “Real-Time Obstacle Avoidance for Manipulators and Mobile Robots”International Journal of Robotics Research, vol. 5, no. 1, pp. 90–98, 1986
work page 1986
-
[2]
Sampling-based Algorithms for Optimal Motion Planning
S. Karaman and E. Frazzoli, “Sampling-based Algorithms for Optimal Motion Planning”International Journal of Robotics Research, p. 76, 2011
work page 2011
-
[3]
A Formal Basis for the Heuristic Determination of Minimum Cost Paths
P. E. Hart, N. J. Nilsson, and B. Raphael, “A Formal Basis for the Heuristic Determination of Minimum Cost Paths”IEEE Transactions on Systems Science and Cybernetics, vol. 4, no. 2, pp. 100–107, 1968
work page 1968
-
[4]
NTFields: Neural Time Fields for Physics- Informed Robot Motion Planning
R. Ni and A. H. Qureshi, “NTFields: Neural Time Fields for Physics- Informed Robot Motion Planning” inInternational Conference on Learning Representations (ICLR), 2023
work page 2023
-
[5]
M. Raissi, P. Perdikaris, and G. E. Karniadakis, “Physics-Informed Neural Networks: A Deep Learning Framework for Solving Forward and Inverse Problems Involving Nonlinear Partial Differential Equa- tions”Journal of Computational Physics, vol. 378, pp. 686–707, 2019
work page 2019
-
[6]
Real-time Path Planning with Virtual Magnetic Fields
M. Moussa and G. Beltrame, “Real-time Path Planning with Virtual Magnetic Fields”IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 3279–3286, 2021
work page 2021
-
[7]
J. Norris, “Downtown West Modular Pack” Cosys-AirSim Environ- ment, Unreal Marketplace, 2022
work page 2022
-
[8]
AirSim: High-Fidelity Visual and Physical Simulation for Autonomous Vehicles
S. Shah, D. Dey, C. Lovett, and A. Kapoor, “AirSim: High-Fidelity Visual and Physical Simulation for Autonomous Vehicles” inField and Service Robotics, 2017, pp. 621–635
work page 2017
-
[9]
Potential Field Methods and their Inherent Limitations for Mobile Robot Navigation
Y . Koren and J. Borenstein, “Potential Field Methods and their Inherent Limitations for Mobile Robot Navigation” inProceedings of the IEEE International Conference on Robotics and Automation (ICRA), 1991, pp. 1398–1404
work page 1991
-
[10]
Exact Robot Navigation Using Artificial Potential Functions
E. Rimon and D. E. Koditschek, “Exact Robot Navigation Using Artificial Potential Functions”IEEE Transactions on Robotics and Automation, vol. 8, no. 5, pp. 501–518, 1992
work page 1992
-
[11]
J. D. Gammell, S. S. Srinivasa, and T. D. Barfoot, “Informed RRT*: Optimal Sampling-based Path Planning Focused via Direct Sam- pling of an Admissible Ellipsoidal Heuristic” inProceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2014
work page 2014
-
[12]
A. H. Qureshi, A. Simeonov, M. J. Bency, and M. C. Yip, “Motion Planning Networks” inProceedings of the IEEE International Con- ference on Robotics and Automation (ICRA), 2019
work page 2019
-
[13]
A. Tamar, Y . Wu, G. Thomas, S. Levine, and P. Abbeel, “Value Itera- tion Networks” inThe Conference on Neural Information Processing Systems (NeurIPS, 2017
work page 2017
-
[14]
MADER: Trajectory Planner in Multi- Agent and Dynamic Environments
J. Tordesillas and J. P. How, “MADER: Trajectory Planner in Multi- Agent and Dynamic Environments”IEEE Transactions on Robotics, vol. 38, no. 1, pp. 463–476, 2020
work page 2020
-
[15]
SciPy 1.0: Fundamental Algorithms for Sci- entific Computing in Python
P. Virtanen, R. Gommers, T. E. Oliphant, M. Haberland, T. Reddy, D. Cournapeauet al., “SciPy 1.0: Fundamental Algorithms for Sci- entific Computing in Python”Nature Methods, vol. 17, pp. 261–272, 2020
work page 2020
-
[16]
Adam: A Method for Stochastic Optimiza- tion
D. P. Kingma and J. Ba, “Adam: A Method for Stochastic Optimiza- tion” inInternational Conference on Learning Representations (ICLR), 2015
work page 2015
-
[17]
33333DDDDDDDD, “LA Night City” Cosys-AirSim Environment, Unreal Marketplace, 2023
work page 2023
-
[18]
33333DDDDDDDD, “London White City” Cosys-AirSim Environ- ment, Unreal Marketplace, 2024
work page 2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.