Recognition: 2 theorem links
· Lean TheoremSurvey-Free Radio Map Construction via HMM-Based Coarse-to-Fine Inference
Pith reviewed 2026-05-13 01:32 UTC · model grok-4.3
The pith
HMM coarse-to-fine inference builds radio maps from unlabeled RSS sequences alone in corridor settings
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
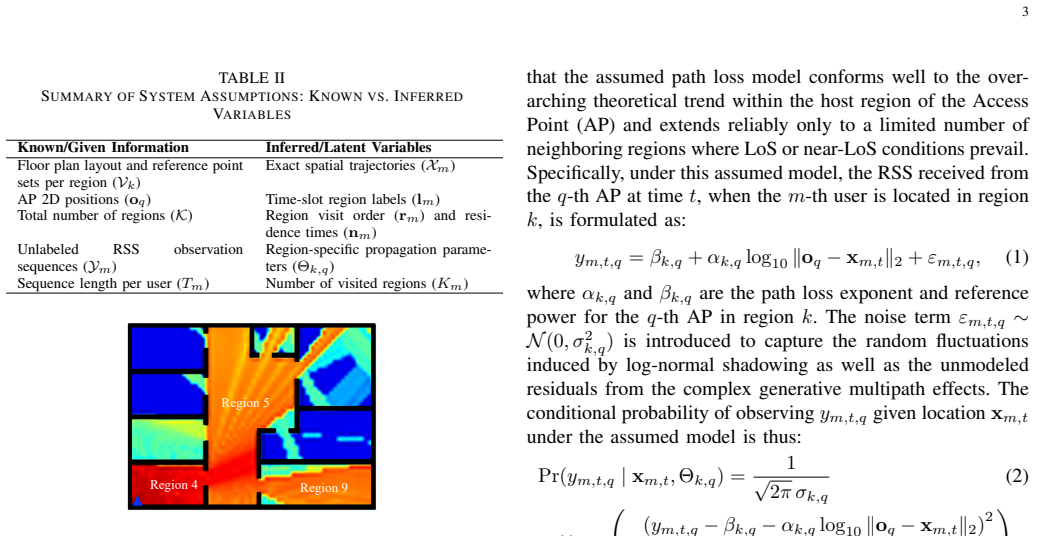
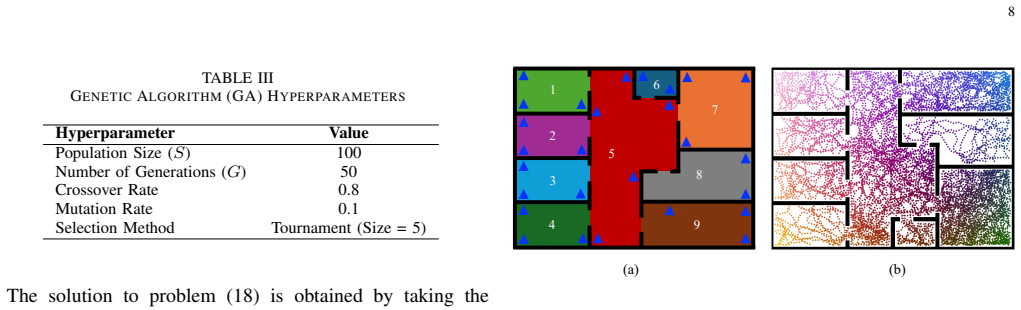
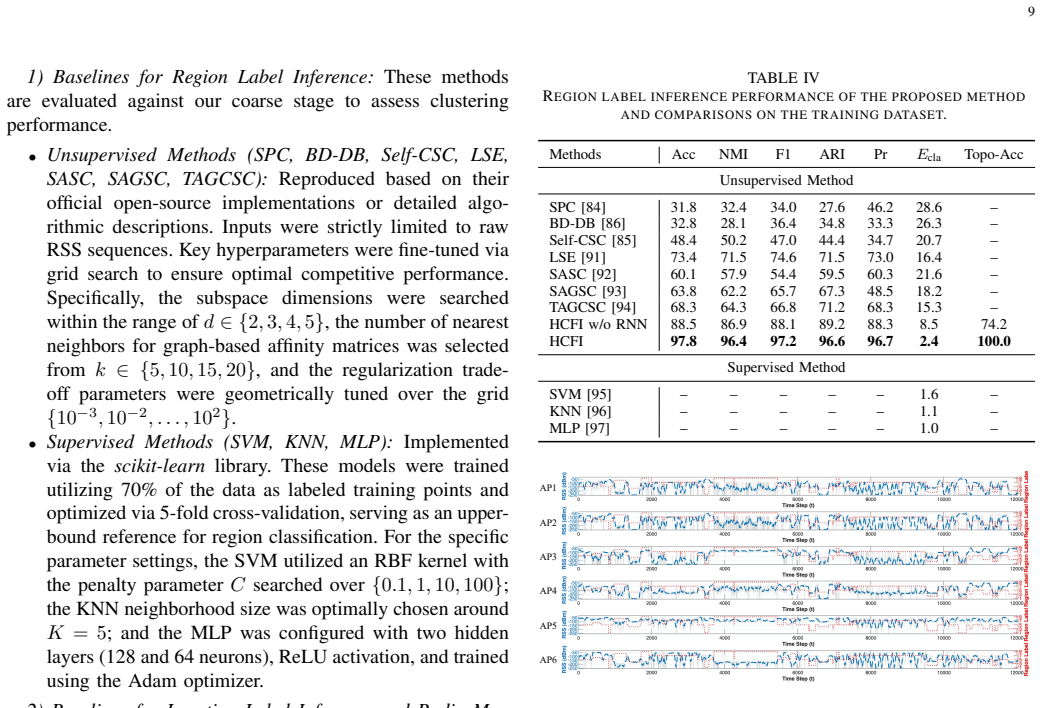
The authors claim that an HMM-based coarse-to-fine inference framework can construct usable radio maps solely from unlabeled RSS sequences. At the coarse stage an HMM with graph inference partitions the sequences and aligns RSS segments to specific physical regions of the known layout. At the fine stage a second HMM estimates the precise coordinates of each RSS measurement by incorporating RSS propagation principles together with spatio-temporal mobility probabilities. Empirical tests in an office environment confirm that the resulting radio map supports KNN localization with low error.
What carries the argument
The HMM-Based Coarse-to-Fine Inference (HCFI) framework, which first performs region label inference to align unlabeled RSS segments with physical areas via graph methods and then applies location label inference that fuses RSS path-loss models with sequential mobility probabilities.
If this is right
- Radio map construction reaches a mean absolute error of 8.96 dB.
- KNN localization performed on the constructed map achieves an average positioning error of 3.33 meters.
- No manual site surveys, location labels, or inertial measurement units are required.
- The method works by embedding RSS sequences into a known indoor layout under the unidirectional flow assumption.
Where Pith is reading between the lines
- The same alignment logic could apply to other linear constrained spaces such as hallways or platforms where movement tends to follow one primary direction.
- Combining the approach with a small amount of labeled seed data might relax the unidirectional flow requirement and extend coverage to more complex building layouts.
- Extending the graph structure to connect multiple floors would allow the framework to scale beyond single-level corridors.
Load-bearing premise
The environment must be corridor-guided with a dominant unidirectional pedestrian flow so that RSS sequences can be aligned to physical regions without any labels or motion sensors.
What would settle it
Running the method in an open-plan space or a corridor with frequent bidirectional or random walking and checking whether the radio map mean absolute error remains near 8.96 dB or rises sharply.
Figures




read the original abstract
Traditional radio map construction methods mandate labor-intensive data collection and precise location labeling. To address these limitations, we propose a novel survey-free approach for radio map construction that relies solely on unlabeled Received Signal Strength (RSS) measurements, thereby obviating the need for manual site surveys or auxiliary Inertial Measurement Units (IMUs). The key idea involves embedding multiple unlabeled RSS sequences into a known indoor layout, specifically targeting corridor-guided environments with a dominant unidirectional pedestrian flow. However, aligning the embedded coordinates with the RSS collection locations remains challenging due to the random fluctuations inherent in RSS data. To tackle this, we introduce a Hidden Markov Model (HMM)- based Coarse-to-Fine Inference (HCFI) framework. At the coarse level, we employ an HMM-based region label inference algorithm to partition RSS sequences and align the RSS segments with specific physical regions using graph-based inference. At the fine level, we develop an HMM-based location label inference technique to estimate RSS collection coordinates by leveraging RSS propagation principles while incorporating sequential spatio-temporal mobility probability. Empirical results from an office environment demonstrate that the proposed method achieves a radio map construction Mean Absolute Error (MAE) of 8.96 dB. Furthermore, based on the estimated radio map, k-Nearest Neighbor (KNN) localization yields an average positioning error of approximately 3.33 meters, offering a highly viable, survey-free solution for radio map construction under sequential topological assumptions.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a survey-free radio map construction technique for indoor corridor environments that uses only unlabeled RSS sequences. It introduces an HMM-based Coarse-to-Fine Inference (HCFI) framework: a coarse HMM performs region-label inference and graph-based alignment under the assumption of dominant unidirectional pedestrian flow, followed by a fine-level HMM that infers precise locations by combining RSS propagation models with sequential mobility priors. In an office-environment evaluation the method reports a radio-map MAE of 8.96 dB and, when the resulting map is used for KNN localization, an average positioning error of 3.33 m.
Significance. If the reported errors are reproducible under the stated topological assumptions, the approach would meaningfully lower the barrier to radio-map construction by removing the need for labeled surveys or IMUs. The coarse-to-fine HMM structure is a plausible way to resolve the alignment ambiguity that arises from RSS fluctuations. The significance is nevertheless constrained by the narrow applicability to unidirectional-flow corridors and by the limited empirical scope described.
major comments (2)
- [Abstract / Empirical Results] Abstract and Empirical Results: the central claims of 8.96 dB MAE and 3.33 m positioning error are presented without error bars, standard deviations, the number of RSS sequences collected, or the number of distinct environments tested. This absence prevents assessment of statistical reliability and reproducibility of the performance numbers.
- [Method Description (HCFI Framework)] Method (HCFI coarse stage): the label-free region alignment rests on the assumption of dominant unidirectional pedestrian flow that makes HMM transition probabilities correspond to physical adjacency. No sensitivity analysis, bidirectional-flow experiments, or validation of the flow direction is reported; violation of the assumption would misalign the RSS segments and invalidate the subsequent fine-level inference and the quoted error figures.
minor comments (1)
- [Abstract] Abstract contains a minor spacing inconsistency: 'HMM- based' should read 'HMM-based'.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed comments. We address each major comment below and describe the corresponding revisions.
read point-by-point responses
-
Referee: [Abstract / Empirical Results] Abstract and Empirical Results: the central claims of 8.96 dB MAE and 3.33 m positioning error are presented without error bars, standard deviations, the number of RSS sequences collected, or the number of distinct environments tested. This absence prevents assessment of statistical reliability and reproducibility of the performance numbers.
Authors: We agree that these details are necessary for assessing reliability. The reported figures come from experiments in a single office corridor environment using 50 unlabeled RSS sequences collected across multiple traversals. In the revised manuscript we will explicitly state the number of sequences and environments, add error bars, and report standard deviations obtained via repeated trials and cross-validation. revision: yes
-
Referee: [Method Description (HCFI Framework)] Method (HCFI coarse stage): the label-free region alignment rests on the assumption of dominant unidirectional pedestrian flow that makes HMM transition probabilities correspond to physical adjacency. No sensitivity analysis, bidirectional-flow experiments, or validation of the flow direction is reported; violation of the assumption would misalign the RSS segments and invalidate the subsequent fine-level inference and the quoted error figures.
Authors: The unidirectional-flow assumption is stated explicitly as a prerequisite for the graph-based alignment step in the coarse HMM. We acknowledge the absence of sensitivity analysis. In the revision we will add a dedicated discussion subsection that (i) justifies the assumption for corridor settings, (ii) analyzes the effect of flow-direction violations on alignment accuracy, and (iii) outlines extensions for bidirectional or mixed-flow scenarios. No new bidirectional experiments will be added, but the scope and limitations of the current results will be clarified. revision: partial
Circularity Check
No circularity: empirical results under explicit topological assumption
full rationale
The paper presents an HMM-based coarse-to-fine inference method for constructing radio maps from unlabeled RSS sequences. It explicitly states the requirement for corridor-guided environments with dominant unidirectional pedestrian flow to enable region alignment via graph-based inference. The reported MAE of 8.96 dB and 3.33 m positioning error are obtained from empirical measurements in an office environment, not from any closed-form derivation or parameter fit that reduces to the input data by construction. No self-citations, self-definitional equations, or renamed known results appear in the derivation chain; the HMM transition/emission models follow standard formulations and the performance numbers are externally falsifiable via the described experiment.
Axiom & Free-Parameter Ledger
free parameters (1)
- HMM transition and emission parameters
axioms (2)
- domain assumption RSS values follow a Markovian dependence on location and time under the unidirectional-flow model
- domain assumption Indoor layout is known a priori and corridors enforce dominant unidirectional movement
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclearHMM-based Coarse-to-Fine Inference (HCFI) framework... corridor-guided environments with a dominant unidirectional pedestrian flow
-
IndisputableMonolith/Foundation/ArithmeticFromLogic.leanLogicNat recovery unclearregion label inference... spatio-temporal mobility probability
Reference graph
Works this paper leans on
-
[1]
A survey of indoor localization systems and technologies,
F. Zafari, A. Gkelias, and K. K. Leung, “A survey of indoor localization systems and technologies,”IEEE Commun. Surv. & Tut., vol. 21, no. 3, pp. 2568–2599, 2019
work page 2019
-
[2]
AI-driven wireless positioning: Fundamentals, standards, state-of-the- art, and challenges,
G. Pan, Y . Gao, Y . Gao, W. Yu, Z. Zhong, X. Yang, X. Guo, and S. Xu, “AI-driven wireless positioning: Fundamentals, standards, state-of-the- art, and challenges,”IEEE Commun. Surv. & Tut., 2025
work page 2025
-
[3]
IEEE 802.11 be Wi-Fi 7: New challenges and opportunities,
C. Deng, X. Fang, X. Han, X. Wang, L. Yan, R. He, Y . Long, and Y . Guo, “IEEE 802.11 be Wi-Fi 7: New challenges and opportunities,” IEEE Commun. Surv. Tut., vol. 22, no. 4, pp. 2136–2166, 2020
work page 2020
-
[4]
A hybrid EKF/WUFIR filter for indoor localization integrating INS and UWB data,
L. Cheng, J. Song, and W. Zhao, “A hybrid EKF/WUFIR filter for indoor localization integrating INS and UWB data,”IEEE Trans. Netw. Sci. Eng., vol. 12, no. 3, pp. 2266–2276, 2025
work page 2025
-
[5]
A. Kumar and S. Kumar, “Joint localization and clock synchronization in cuboid bounded diffusive channel with absorbing and reflecting boundaries,”IEEE Trans. Netw. Sci. Eng., vol. 11, no. 6, pp. 6511–6521, 2024
work page 2024
-
[6]
Near-field localization of mobile robots with multiple access points collaboration,
X. Zheng, S. Li, S. Zhang, J. Kang, and T. Jiang, “Near-field localization of mobile robots with multiple access points collaboration,”IEEE Trans. Netw. Sci. Eng., vol. 13, pp. 1176–1190, 2026
work page 2026
-
[7]
Robust WiFi localization by fusing derivative fingerprints of RSS and multiple classifiers,
X. Guo, N. R. Elikplim, N. Ansari, L. Li, and L. Wang, “Robust WiFi localization by fusing derivative fingerprints of RSS and multiple classifiers,”IEEE Trans. Ind. Inform., vol. 16, no. 5, pp. 3177–3186, 2020
work page 2020
-
[8]
RADAR: An in-building RF-based user location and tracking system,
P. Bahl and V . N. Padmanabhan, “RADAR: An in-building RF-based user location and tracking system,” inProceedings of IEEE International Conference on Computer Communications (INFOCOM), vol. 2, 2000, pp. 775–784
work page 2000
-
[9]
RSS localization under Gaussian distributed path loss exponent model,
K. S. V . Prasad and V . K. Bhargava, “RSS localization under Gaussian distributed path loss exponent model,”IEEE Wireless Commun. Lett., vol. 10, no. 1, pp. 111–115, 2020
work page 2020
-
[10]
Genetic algorithm for path loss model selection in signal strength-based indoor localization,
B.-h. Lee, D. Ham, J. Choi, S.-C. Kim, and Y .-H. Kim, “Genetic algorithm for path loss model selection in signal strength-based indoor localization,”IEEE Sens. J., vol. 21, no. 21, pp. 24 285–24 296, 2021
work page 2021
-
[11]
Fadeloc: Smart device localization for generalizedκ−µfaded IoT environment,
A. Pandey, P. Tiwary, S. Kumar, and S. K. Das, “Fadeloc: Smart device localization for generalizedκ−µfaded IoT environment,”IEEE Trans. Signal Process., vol. 70, no. 4, pp. 3206–3220, 2022
work page 2022
-
[12]
D. Jin, F. Yin, C. Fritsche, F. Gustafsson, and A. M. Zoubir, “Bayesian cooperative localization using received signal strength with unknown path loss exponent: Message passing approaches,”IEEE Trans. Signal Process., vol. 68, no. 4, pp. 1120–1135, 2020
work page 2020
-
[13]
Bias reduced semidefinite relaxation method for 3-d rigid body localization using aoa,
G. Wang, K. Ho, and X. Chen, “Bias reduced semidefinite relaxation method for 3-d rigid body localization using aoa,”IEEE Trans. Signal Process., vol. 69, pp. 3415–3430, 2021
work page 2021
-
[14]
New closed- form joint localization and synchronization using sequential one-way TOAs,
N. Guo, S. Zhao, X.-P. Zhang, Z. Yao, X. Cui, and M. Lu, “New closed- form joint localization and synchronization using sequential one-way TOAs,”IEEE Trans. Signal Process., vol. 70, pp. 2078–2092, 2022
work page 2078
-
[15]
Weighted centroid local- ization algorithm: theoretical analysis and distributed implementation,
J. Wang, P. Urriza, Y . Han, and D. Cabric, “Weighted centroid local- ization algorithm: theoretical analysis and distributed implementation,” IEEE Trans. Wirel. Commun., vol. 10, no. 10, pp. 3403–3413, 2011
work page 2011
-
[16]
Online self- calibration of the propagation model for indoor positioning ranging methods,
a. G. Anagnostopoulos, a. Deriaz, and a. Konstantas, “Online self- calibration of the propagation model for indoor positioning ranging methods,” inProceedings of International Conference on Indoor Po- sitioning and Indoor Navigation (IPIN), 2016, pp. 1–6
work page 2016
-
[17]
Weighted adaptive KNN algorithm with historical information fusion for fingerprint posi- tioning,
H. Zhang, Z. Wang, W. Xia, Y . Ni, and H. Zhao, “Weighted adaptive KNN algorithm with historical information fusion for fingerprint posi- tioning,”IEEE Wireless Commun. Lett., vol. 11, no. 5, pp. 1002–1006, 2022
work page 2022
-
[18]
Constructing indoor region-based radio map without location labels,
Z. Xing and J. Chen, “Constructing indoor region-based radio map without location labels,”IEEE Trans. Signal Process., vol. 72, pp. 2512– 2526, 2024
work page 2024
-
[19]
Aips: An accurate indoor positioning system with fingerprint map adaptation,
Y . Tao and L. Zhao, “Aips: An accurate indoor positioning system with fingerprint map adaptation,”IEEE Internet Things J., vol. 9, no. 4, pp. 3062–3073, 2021
work page 2021
-
[20]
A new algorithm for indoor rssi radio map reconstruction,
W. Xue, Q. Li, X. Hua, K. Yu, W. Qiu, and B. Zhou, “A new algorithm for indoor rssi radio map reconstruction,”IEEE Access, vol. 6, pp. 76 118–76 125, 2018
work page 2018
-
[21]
L. Zhang, S. Wu, T. Zhang, and Q. Zhang, “Learning to locate: Adaptive fingerprint-based localization with few-shot relation learning in dynamic indoor environments,”IEEE Trans. Wirel. Commun., vol. 22, no. 8, pp. 5253–5264, 2023
work page 2023
-
[22]
X. Wang, Q. Zhang, N. Cheng, J. Chen, Z. Zhang, Z. Li, S. Cui, and X. Shen, “RadioDiff-3D: A 3D×3D radio map dataset and generative diffusion based benchmark for 6G environment-aware communication,” IEEE Trans. Netw. Sci. Eng., vol. 13, pp. 3773–3789, 2026
work page 2026
-
[23]
H. Jia, N. Cheng, X. Wang, C. Zhou, R. Sun, and X. Shen, “Ra- diomamba: Breaking the accuracy-efficiency trade-off in radio map construction via a hybrid mamba-unet,”IEEE Trans. Netw. Sci. Eng., vol. 13, pp. 2454–2468, 2026
work page 2026
-
[24]
SE- Loc: Security-enhanced indoor localization with semi-supervised deep 13 learning,
Q. Ye, X. Fan, H. Bie, D. Puthal, T. Wu, X. Song, and G. Fang, “SE- Loc: Security-enhanced indoor localization with semi-supervised deep 13 learning,”IEEE Trans. Netw. Sci. Eng., vol. 10, no. 5, pp. 2964–2977, 2022
work page 2022
-
[25]
C. Zhou, J. Liu, M. Sheng, Y . Zheng, and J. Li, “Exploiting fingerprint correlation for fingerprint-based indoor localization: A deep learning based approach,”IEEE Trans. Veh. Technol., vol. 70, no. 6, pp. 5762– 5774, Jun. 2021
work page 2021
-
[26]
Intelligent fingerprint-based localization scheme using csi images for internet of things,
X. Zhu, W. Qu, X. Zhou, L. Zhao, Z. Ning, and T. Qiu, “Intelligent fingerprint-based localization scheme using csi images for internet of things,”IEEE Trans. Netw. Sci. Eng., vol. 9, no. 4, pp. 2378–2391, 2022
work page 2022
-
[27]
A gaussian splatting approach to continuous radio map construction,
A. Chen, S. Mao, Z. Li, H. Zhang, D. Niyato, and Z. Han, “A gaussian splatting approach to continuous radio map construction,” inIEEE Conference on Computer Communications Workshops, 2025, pp. 1–6
work page 2025
-
[28]
Concealing radio frequency fingerprints via active adversarial perturbation,
Z. Lu, M. Tu, X. Xie, W. Xu, C. Hua, and W. Zhuang, “Concealing radio frequency fingerprints via active adversarial perturbation,”IEEE Trans. Netw. Sci. Eng., vol. 12, no. 5, pp. 4098–4113, 2025
work page 2025
-
[29]
Lightweight intelligent localization for internet of robotic things: Method, theory, application,
M. Zhang, X. He, L. Lu, X. Zhu, T. Zhang, R. Gao, and D. Niy- ato, “Lightweight intelligent localization for internet of robotic things: Method, theory, application,”IEEE Internet of Things Magazine, vol. 9, no. 1, pp. 7–12, 2026
work page 2026
-
[30]
M. Zhang, L. Lu, A. Hussain, X. Zhu, Y . Yao, R. Gao, W. Ma, T. Zhang, and D. Niyato, “BLINK: An effective indoor localization method based on csi by broad learning and kolmogorov-arnold network,” inIEEE International Conference on Communications Workshops, 2025, pp. 117–122
work page 2025
-
[31]
Efficient detection of cooperative external attacks in wireless local- ization systems,
J. Yuan, Y . Cai, Y . Chen, N. Xie, P. Zhang, L. Huang, and D. Niyato, “Efficient detection of cooperative external attacks in wireless local- ization systems,”IEEE Trans. Wireless Commun., vol. 23, no. 11, pp. 16 666–16 682, 2024
work page 2024
-
[32]
Through the wall detection and localization of autonomous mobile device in indoor scenario,
J. Wang, H. Du, D. Niyato, M. Zhou, J. Kang, Z. Xiong, and A. Ja- malipour, “Through the wall detection and localization of autonomous mobile device in indoor scenario,”IEEE J. Sel. Areas Commun., vol. 42, no. 1, pp. 161–176, 2024
work page 2024
-
[33]
Cifi: Deep convolutional neural networks for indoor localization with 5 ghz wi-fi,
X. Wang, X. Wang, and S. Mao, “Cifi: Deep convolutional neural networks for indoor localization with 5 ghz wi-fi,” inIEEE International Conference on Communications. IEEE, 2017, pp. 1–6
work page 2017
-
[34]
Dafi: Wifi-based device- free indoor localization via domain adaptation,
H. Li, X. Chen, J. Wang, D. Wu, and X. Liu, “Dafi: Wifi-based device- free indoor localization via domain adaptation,”Proceedings of the ACM on Interactive, Mobile, Wearable and Ubiquitous Technologies, vol. 5, no. 4, pp. 1–21, 2021
work page 2021
-
[35]
G. Prasad, A. Pandey, and S. Kumar, “Domain adaptation for localization using combined autoencoder and gradient reversal layer in dynamic IoT environment,”IEEE Trans. Netw. Sci. Eng., vol. 11, no. 1, pp. 685–695, 2023
work page 2023
-
[36]
Implicit multimodal crowdsourcing for joint rf and geomagnetic fingerprinting,
J. Tan, H. Wu, K.-H. Chow, and S.-H. G. Chan, “Implicit multimodal crowdsourcing for joint rf and geomagnetic fingerprinting,”IEEE Trans. Mobile Comput., vol. 22, no. 2, pp. 935–950, 2023
work page 2023
-
[37]
Crcloc: A crowdsourcing-based radio map construction method for wifi fingerprinting localization,
X. Du, X. Liao, M. Liu, and Z. Gao, “Crcloc: A crowdsourcing-based radio map construction method for wifi fingerprinting localization,” IEEE Internet Things J., vol. 9, no. 14, pp. 12 364–12 377, 2021
work page 2021
-
[38]
Disentangled representation learning for RF fingerprint extraction under unknown channel statistics,
R. Xie, W. Xu, J. Yu, A. Hu, D. W. K. Ng, and A. L. Swindlehurst, “Disentangled representation learning for RF fingerprint extraction under unknown channel statistics,”IEEE Trans. Wirel. Commun., vol. 71, no. 7, pp. 3946–3962, 2023
work page 2023
-
[39]
Localization in wireless sensor networks based on support vector machines,
D. A. Tran and T. Nguyen, “Localization in wireless sensor networks based on support vector machines,”IEEE Trans. Parallel Distrib. Syst., vol. 19, no. 7, pp. 981–994, 2008
work page 2008
-
[40]
Location estimation via support vector regression,
Z.-l. Wu, C.-h. Li, J. K.-Y . Ng, and K. R. Leung, “Location estimation via support vector regression,”IEEE Trans. Mob. Comput., vol. 6, no. 3, pp. 311–321, 2007
work page 2007
-
[41]
DQLEL: Deep Q-learning for energy-optimized LoS/NLoS UWB node selection,
Z. Hajiakhondi-Meybodi, A. Mohammadi, M. Hou, and K. N. Platani- otis, “DQLEL: Deep Q-learning for energy-optimized LoS/NLoS UWB node selection,”IEEE Trans. Signal Process., vol. 70, no. 4, pp. 2532– 2547, 2022
work page 2022
-
[42]
Cooperative localization in wireless sensor networks with AOA measurements,
S. Wang, X. Jiang, and H. Wymeersch, “Cooperative localization in wireless sensor networks with AOA measurements,”IEEE Trans. Wirel. Commun., vol. 21, no. 8, pp. 6760–6773, 2022
work page 2022
-
[43]
FAS-ARIS: Turning multipath challenges into localization opportunities,
H. Chen, T. Gong, T. Wu, M. Elkashlan, B. Liu, C.-B. Chae, K.-F. Tong, and K.-K. Wong, “FAS-ARIS: Turning multipath challenges into localization opportunities,”IEEE Trans. Netw. Sci. Eng., vol. 13, pp. 3756–3772, 2026
work page 2026
-
[44]
Reflection map construction: Enhancing and speeding up indoor localization,
M. Johnny and S. Valaee, “Reflection map construction: Enhancing and speeding up indoor localization,”IEEE Trans. Wireless Commun., vol. 24, no. 8, p. 6580–6595, 2025
work page 2025
-
[45]
H. Zou, M. Jin, H. Jiang, L. Xie, and C. J. Spanos, “Winips: Wifi- based non-intrusive indoor positioning system with online radio map construction and adaptation,”IEEE Trans. Wireless Commun., vol. 16, no. 12, pp. 8118–8130, 2017
work page 2017
-
[46]
Will: Wireless indoor localization without site survey,
C. Wu, Z. Yang, Y . Liu, and W. Xi, “Will: Wireless indoor localization without site survey,”IEEE Transactions on Parallel and Distributed systems, vol. 24, no. 4, pp. 839–848, 2012
work page 2012
-
[47]
Transloc: A het- erogeneous knowledge transfer framework for fingerprint-based indoor localization,
L. Li, X. Guo, M. Zhao, H. Li, and N. Ansari, “Transloc: A het- erogeneous knowledge transfer framework for fingerprint-based indoor localization,”IEEE Trans. Wireless Commun., vol. 20, no. 6, pp. 3628– 3642, 2021
work page 2021
-
[48]
A novel fused positioning feature for handling heterogeneous hardware problem,
S.-H. Fang and C.-H. Wang, “A novel fused positioning feature for handling heterogeneous hardware problem,”IEEE Trans. Commun., vol. 63, no. 7, pp. 2713–2723, 2015
work page 2015
-
[49]
Protecting position privacy in range-based crowdsourcing cooperative localization,
Y . Zhu, Y . Qiu, J. Wang, J. Hu, F. Yan, and S. Zhao, “Protecting position privacy in range-based crowdsourcing cooperative localization,”IEEE Trans. Netw. Sci. Eng., vol. 11, no. 1, pp. 1136–1150, 2023
work page 2023
-
[50]
Dividing-and-kriging method for wireless RSS fingerprint based indoor localization,
Y . Li, Y . Nishikawa, and T. Nobukiyo, “Dividing-and-kriging method for wireless RSS fingerprint based indoor localization,” inProc. IEEE Global Commun. Conf., Dec. 2019, pp. 1–6
work page 2019
-
[51]
A comparative study of deep-learning- based semi-supervised device-free indoor localization,
K. M. Chen and R. Y . Chang, “A comparative study of deep-learning- based semi-supervised device-free indoor localization,” inProc. IEEE Global Commun. Conf., Dec. 2021, pp. 1–6
work page 2021
-
[52]
Leto: crowdsourced radio map construction with learned topology and a few landmarks,
Y . Wang, A. K.-s. Wong, S.-H. G. Chan, and W. H. Mow, “Leto: crowdsourced radio map construction with learned topology and a few landmarks,”IEEE Trans. Mobile Comput., vol. 23, no. 4, pp. 2795–2812, 2024
work page 2024
-
[53]
Rmapcs: Radio map construction from crowd- sourced samples for indoor localization,
Y . Ye and B. Wang, “Rmapcs: Radio map construction from crowd- sourced samples for indoor localization,”IEEE Access, vol. 6, pp. 24 224–24 238, 2018
work page 2018
-
[54]
Learning adaptive temporal radio maps for signal-strength-based location estimation,
J. Yin, Q. Yang, and L. M. Ni, “Learning adaptive temporal radio maps for signal-strength-based location estimation,”IEEE Trans. Mobile Comput., vol. 7, no. 7, pp. 869–883, 2008
work page 2008
-
[55]
LCWF: Low- overhead collaborative WiFi fingerprint localization considering devices heterogeneity,
Y . Tao, S. Tan, R. Yan, N. Liu, Q. Gao, and J. L ¨u, “LCWF: Low- overhead collaborative WiFi fingerprint localization considering devices heterogeneity,”IEEE Trans. Netw. Sci. Eng., 2025
work page 2025
-
[56]
Zee: Zero-effort crowdsourcing for indoor localization,
A. Rai, K. K. Chintalapudi, V . N. Padmanabhan, and R. Sen, “Zee: Zero-effort crowdsourcing for indoor localization,” inProceedings of the annual international conference on Mobile computing and networking, 2012, pp. 293–304
work page 2012
-
[57]
An efficient radio map learning scheme based on kernel density function,
Z. Xu, B. Huang, and B. Jia, “An efficient radio map learning scheme based on kernel density function,”IEEE Trans. Veh. Technol., vol. 70, no. 12, pp. 13 315–13 324, 2021
work page 2021
-
[58]
Deep spectrum cartography: Com- pleting radio map tensors using learned neural models,
S. Shrestha, X. Fu, and M. Hong, “Deep spectrum cartography: Com- pleting radio map tensors using learned neural models,”IEEE Trans. Signal Process., vol. 70, pp. 1170–1184, 2022
work page 2022
-
[59]
A meta-learning approach for device-free indoor localization,
W. Wei, J. Yan, X. Wu, C. Wang, and G. Zhang, “A meta-learning approach for device-free indoor localization,”IEEE Commun. Lett., vol. 27, no. 3, pp. 846–850, 2023
work page 2023
-
[60]
Lever- aging triplet loss and nonlinear dimensionality reduction for on-the-fly channel charting,
T. Yassine, L. Le Magoarou, S. Paquelet, and M. Crussi `ere, “Lever- aging triplet loss and nonlinear dimensionality reduction for on-the-fly channel charting,” inIEEE International Workshop on Signal Processing Advances in Wireless Communication, 2022
work page 2022
-
[61]
Probabilistic PCA from heteroscedastic signals: Geometric framework and application to clustering,
A. Collas, F. Bouchard, A. Breloy, G. Ginolhac, C. Ren, and J.-P. Ovarlez, “Probabilistic PCA from heteroscedastic signals: Geometric framework and application to clustering,”IEEE Trans. Signal Process., vol. 69, pp. 6546–6560, 2021
work page 2021
-
[62]
Robust non-linear matrix factorization for dictionary learning, denoising, and clustering,
J. Fan, C. Yang, and M. Udell, “Robust non-linear matrix factorization for dictionary learning, denoising, and clustering,”IEEE Trans. Signal Process., vol. 69, pp. 1755–1770, 2021
work page 2021
-
[63]
Multi-source localization based on graph representation learning and bayesian optimization,
Z. Zhou, Y . Wang, Q. Zhai, and J. Yan, “Multi-source localization based on graph representation learning and bayesian optimization,”IEEE Trans. Netw. Sci. Eng., vol. 13, pp. 4815–4832, 2025
work page 2025
-
[64]
Salc: Skeleton-assisted learning-based clustering for time-varying indoor lo- calization,
A.-H. Hsiao, L.-H. Shen, C.-Y . Chang, C.-J. Chiu, and K.-T. Feng, “Salc: Skeleton-assisted learning-based clustering for time-varying indoor lo- calization,”IEEE Trans. Netw. Sci. Eng., vol. 11, no. 1, pp. 439–452, 2023
work page 2023
-
[65]
K. Lin, Y . Li, J. Deng, P. Pace, and G. Fortino, “Clustering-learning- based long-term predictive localization in 5G-envisioned internet of connected vehicles,”IEEE Trans. Intell. Transp. Syst., vol. 22, no. 8, pp. 5232–5246, 2021
work page 2021
-
[66]
An online radio map update scheme for wifi fingerprint-based localization,
B. Huang, Z. Xu, B. Jia, and G. Mao, “An online radio map update scheme for wifi fingerprint-based localization,”IEEE Internet Things J., vol. 6, no. 4, pp. 6909–6918, 2019
work page 2019
-
[67]
A novel system for wifi radio map automatic adaptation and indoor positioning,
Y . Tao and L. Zhao, “A novel system for wifi radio map automatic adaptation and indoor positioning,”IEEE Trans. Veh. Technol., vol. 67, no. 11, pp. 10 683–10 692, 2018. 14
work page 2018
-
[68]
Automatic radio map adaptation for indoor localization using smartphones,
C. Wu, Z. Yang, and C. Xiao, “Automatic radio map adaptation for indoor localization using smartphones,”IEEE Trans. Mobile Comput., vol. 17, no. 3, pp. 517–528, 2017
work page 2017
-
[69]
Dynamic online- calibrated radio maps for indoor positioning in wireless local area networks,
M. M. Atia, A. Noureldin, and M. J. Korenberg, “Dynamic online- calibrated radio maps for indoor positioning in wireless local area networks,”IEEE Trans. Mobile Comput., vol. 12, no. 9, pp. 1774–1787, 2012
work page 2012
-
[70]
Static power of mobile devices: Self-updating radio maps for wireless indoor localiza- tion,
C. Wu, Z. Yang, C. Xiao, C. Yang, Y . Liu, and M. Liu, “Static power of mobile devices: Self-updating radio maps for wireless indoor localiza- tion,” inIEEE Conference on Computer Communications (INFOCOM), 2015, pp. 2497–2505
work page 2015
-
[71]
Joint indoor localization and radio map construction with limited deployment load,
S. Sorour, Y . Lostanlen, S. Valaee, and K. Majeed, “Joint indoor localization and radio map construction with limited deployment load,” IEEE Trans. Mobile Comput., vol. 14, no. 5, pp. 1031–1043, 2014
work page 2014
-
[72]
Intelligent reflecting surface enhanced indoor robot path planning: A radio map-based ap- proach,
X. Mu, Y . Liu, L. Guo, J. Lin, and R. Schober, “Intelligent reflecting surface enhanced indoor robot path planning: A radio map-based ap- proach,”IEEE Trans. Wireless Commun., vol. 20, no. 7, pp. 4732–4747, 2021
work page 2021
-
[73]
Sensor-aided learning for Wi-Fi positioning with beacon channel state information,
J. Choi, “Sensor-aided learning for Wi-Fi positioning with beacon channel state information,”IEEE Trans. Wireless Commun., vol. 21, no. 7, pp. 5251–5264, 2022
work page 2022
-
[74]
No need to war-drive: Unsupervised indoor localization,
H. Wang, S. Sen, A. Elgohary, M. Farid, M. Youssef, and R. R. Choudhury, “No need to war-drive: Unsupervised indoor localization,” inProceedings of the international conference on Mobile systems, applications, and services, 2012, pp. 197–210
work page 2012
-
[75]
Smartphones based crowdsourcing for indoor localization,
C. Wu, Z. Yang, and Y . Liu, “Smartphones based crowdsourcing for indoor localization,”IEEE Trans. Mobile Comput., vol. 14, no. 2, pp. 444–457, 2014
work page 2014
-
[76]
Wifi-rita positioning: Enhanced crowdsourcing positioning based on massive noisy user traces,
Z. Li, X. Zhao, Z. Zhao, and T. Braun, “Wifi-rita positioning: Enhanced crowdsourcing positioning based on massive noisy user traces,”IEEE Trans. Wireless Commun., vol. 20, no. 6, pp. 3785–3799, 2021
work page 2021
-
[77]
Semi-automated signal surveying using smart- phones and floorplans,
C. Gao and R. Harle, “Semi-automated signal surveying using smart- phones and floorplans,”IEEE Trans. Mobile Comput., vol. 17, no. 8, pp. 1952–1965, 2017
work page 1952
-
[78]
Unambiguous association of crowd-sourced radio maps to floor plans for indoor localization,
X. Zhang, A. K.-S. Wong, C.-T. Lea, and R. S.-K. Cheng, “Unambiguous association of crowd-sourced radio maps to floor plans for indoor localization,”IEEE Trans. Mobile Comput., vol. 17, no. 2, pp. 488–502, 2017
work page 2017
-
[79]
Unsupervised learning for crowd- sourced indoor localization in wireless networks,
S.-h. Jung, B.-c. Moon, and D. Han, “Unsupervised learning for crowd- sourced indoor localization in wireless networks,”IEEE Trans. Mobile Comput., vol. 15, no. 11, pp. 2892–2906, 2015
work page 2015
-
[80]
Will: Wireless indoor localization without site survey,
C. Wu, Z. Yang, Y . Liu, and W. Xi, “Will: Wireless indoor localization without site survey,”IEEE Trans. Parallel Distrib. Syst., vol. 24, no. 4, pp. 839–848, 2012
work page 2012
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.