Recognition: 2 theorem links
· Lean TheoremInterpretable Machine Learning for Spatial Science: A Lie-Algebraic Kernel for Rotationally Anisotropic Gaussian Processes
Pith reviewed 2026-05-13 02:06 UTC · model grok-4.3
The pith
A Gaussian process kernel parameterizes three-dimensional rotated anisotropy using explicit length scales and an SO(3) rotation derived from the Lie algebra.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The kernel defines the covariance between points through a quadratic form whose metric is R^T D^{-2} R, where D is the diagonal matrix of three length scales and R is obtained from the exponential map applied to an axis-angle vector in the Lie algebra of SO(3). This parameterization is unconstrained for numerical inference, guarantees a valid positive definite metric, and spans the identical set of three-dimensional SPD metrics as a generic full parameterization while exposing length scales and orientation as explicit, interpretable parameters.
What carries the argument
Axis-angle vector in the Lie algebra of SO(3) mapped to a rotation matrix via the matrix exponential, combined with three principal length scales to define the quadratic form of the covariance metric.
If this is right
- Posterior summaries of the rotation parameters and length scales become directly usable for prior elicitation based on domain knowledge.
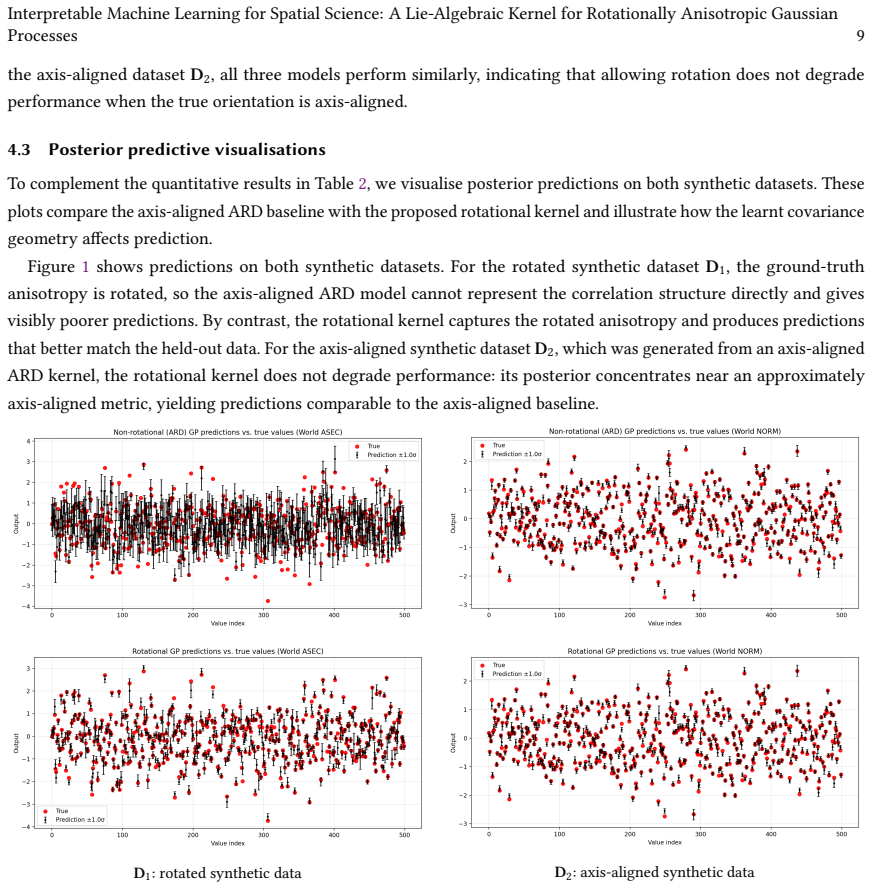
- When the true anisotropy is rotated, the kernel recovers the generating metric and improves predictions over axis-aligned ARD kernels.
- When the true anisotropy is axis-aligned, posterior mass on the rotation concentrates near the identity matrix.
- The parameterization identifies symmetries and weakly identified regimes for the rotation parameters under MCMC sampling.
Where Pith is reading between the lines
- Explicit directional parameters could allow spatial models to incorporate physical constraints on preferred orientations without reparameterizing the entire metric.
- The same Lie-algebraic device might be applied to other matrix groups to obtain interpretable parameterizations for covariance structures in higher dimensions or on manifolds.
- In applications with suspected non-stationary anisotropy, the single global rotation could serve as a baseline against which local deviations are measured.
Load-bearing premise
The spatial field is stationary with a single global rotation and three fixed principal length scales everywhere in the domain.
What would settle it
On synthetic data generated from a known rotated anisotropic metric, the MCMC posterior for the axis-angle vector and length scales fails to concentrate around the true values or the predictive mean squared error does not match that of a generic full-SPD kernel.
Figures





read the original abstract
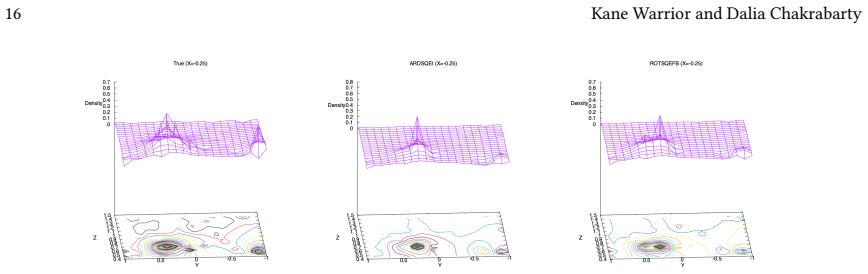
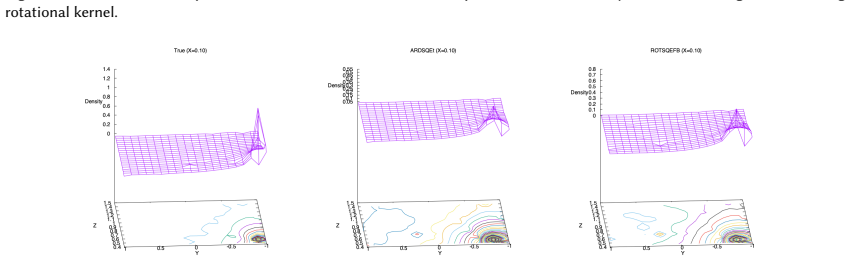
Many three-dimensional spatial fields are anisotropic, with directions of rapid and slow variation that need not align with the coordinate axes. Standard Gaussian process kernels with Automatic Relevance Determination (ARD) capture only axis-aligned anisotropy, while generic full symmetric positive definite (SPD) metrics can represent rotated anisotropy but do not parameterise principal length-scales and directions directly. We introduce an interpretable rotationally anisotropic GP kernel that parameterises a three-dimensional SPD covariance metric using three principal length-scales and an explicit SO(3) rotation. The rotation is represented by an axis-angle vector and mapped to SO(3) via the Lie-algebra exponential map, giving unconstrained Euclidean coordinates for inference while always inducing a valid SPD metric. The construction spans the same family of three-dimensional SPD covariance metrics as a generic full-SPD parameterisation, but exposes the geometry differently: length-scales and orientation are explicit, interpretable, and directly available for prior specification and posterior summaries. We perform Bayesian inference on these quantities using Markov Chain Monte Carlo (MCMC), and characterise the resulting symmetries and weakly identified regimes. On synthetic data with rotated anisotropy, the posterior recovers the generating metric and improves prediction relative to an axis-aligned ARD baseline, while matching the predictive performance of a generic full SPD baseline. When the ground truth is axis-aligned, posterior mass concentrates near the identity rotation and predictive performance matches ARD. On a material-density dataset from a laboratory-fabricated nano-brick, the inferred metric reveals rotated anisotropy that is not captured by axis-aligned kernels.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a Lie-algebraic kernel for three-dimensional Gaussian processes that parameterizes rotated anisotropy via three principal length-scales and an axis-angle vector in so(3), mapped to SO(3) by the matrix exponential. This yields an unconstrained parameterization for MCMC inference while guaranteeing a valid SPD metric. The construction is shown to span exactly the same six-dimensional manifold of 3x3 SPD matrices as a generic full-SPD parameterization, with explicit handling of symmetries and weak-identification loci (coincident length-scales, axis-angle periodicity). Experiments on synthetic data with known rotated anisotropy recover the generating metric and match full-SPD predictive performance while outperforming axis-aligned ARD; on axis-aligned ground truth the posterior concentrates near the identity; on a nano-brick material-density dataset the inferred rotation reveals anisotropy missed by ARD.
Significance. If the central construction holds, the work supplies a practically useful reparameterization that makes length-scales and orientation directly interpretable and available for prior elicitation and posterior reporting, without sacrificing expressivity relative to an unconstrained SPD metric. This is particularly relevant for spatial applications in materials science and geostatistics where anisotropy directions carry physical meaning. The explicit characterization of MCMC symmetries and weak-identification regimes is a methodological strength that aids reliable inference.
major comments (2)
- Experiments section: the synthetic-data results are described only qualitatively ('successful recovery', 'improved prediction', 'matches performance') with no reported quantitative metrics such as parameter recovery error, predictive log-likelihood differences, or credible-interval coverage; this leaves the magnitude of the claimed advantages over ARD and equivalence to full SPD unverifiable from the presented evidence.
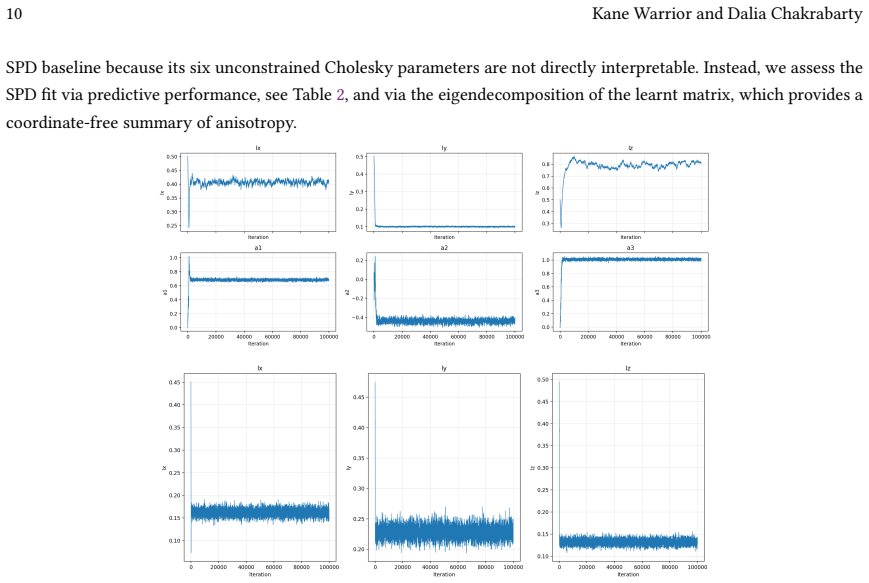
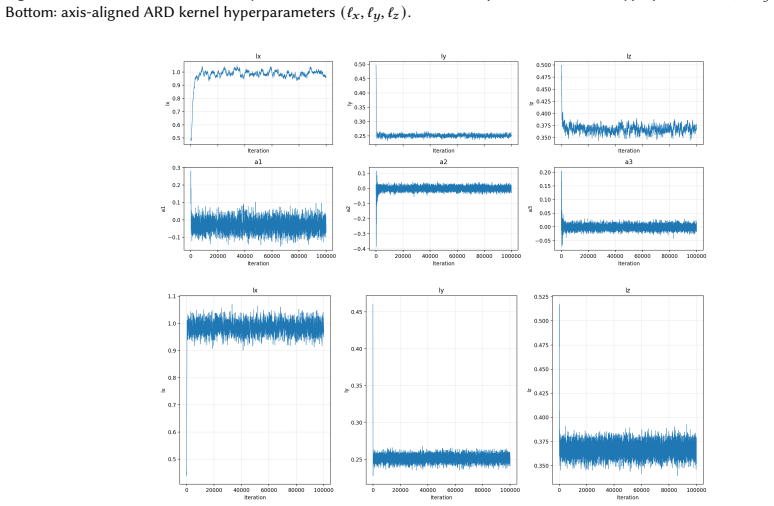
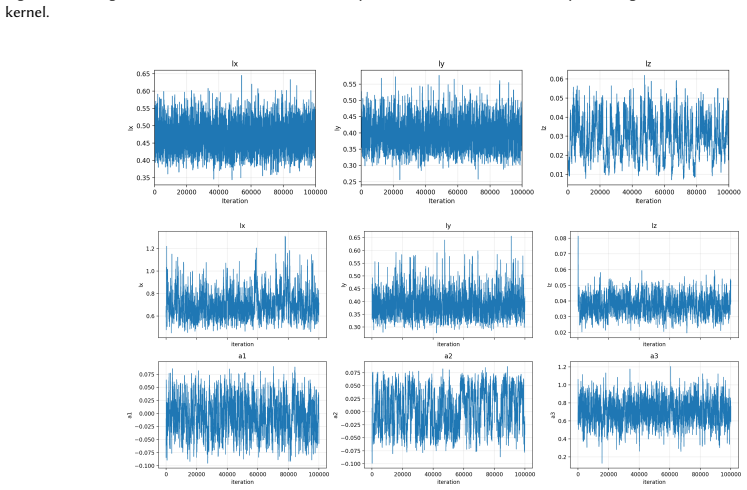
- § on MCMC and weak identification: while the loci of weak identifiability (coincident length-scales, θ=0, 2π periodicity) are correctly identified as geometric features, the manuscript provides no diagnostic results (e.g., posterior trace plots, effective sample sizes, or sensitivity to initialization) demonstrating that the sampler reliably explores the posterior in these regimes.
minor comments (3)
- Notation: the mapping from axis-angle vector to SO(3) via exp is standard, but the precise definition of the Lie-algebra basis and the handling of the double-cover (sign flips) should be stated explicitly in the kernel definition to avoid ambiguity for readers implementing the method.
- The real-data experiment would benefit from a brief description of the nano-brick dataset size, sampling density, and any preprocessing steps that could affect the inferred anisotropy.
- Figure captions and axis labels should include units or scaling information for length-scale parameters to facilitate direct comparison with physical expectations.
Simulated Author's Rebuttal
We thank the referee for the constructive review and for highlighting the potential value of the Lie-algebraic kernel for interpretable spatial modeling. We address each major comment below and will revise the manuscript accordingly to strengthen the empirical support and MCMC diagnostics.
read point-by-point responses
-
Referee: Experiments section: the synthetic-data results are described only qualitatively ('successful recovery', 'improved prediction', 'matches performance') with no reported quantitative metrics such as parameter recovery error, predictive log-likelihood differences, or credible-interval coverage; this leaves the magnitude of the claimed advantages over ARD and equivalence to full SPD unverifiable from the presented evidence.
Authors: We agree that the synthetic results are presented qualitatively in the current draft and that quantitative metrics would allow readers to assess the magnitude of the reported advantages. In the revised manuscript we will add explicit quantitative summaries from the synthetic experiments, including parameter recovery error (e.g., Frobenius distance between posterior mean and ground-truth metric), differences in predictive log-likelihood relative to the ARD and full-SPD baselines, and empirical coverage of 95% credible intervals. These additions will make the equivalence to full SPD and improvement over ARD directly verifiable. revision: yes
-
Referee: § on MCMC and weak identification: while the loci of weak identifiability (coincident length-scales, θ=0, 2π periodicity) are correctly identified as geometric features, the manuscript provides no diagnostic results (e.g., posterior trace plots, effective sample sizes, or sensitivity to initialization) demonstrating that the sampler reliably explores the posterior in these regimes.
Authors: We acknowledge that the manuscript currently lacks explicit MCMC diagnostics for the weak-identification regimes. We will add these to the revised version, including representative posterior trace plots, effective sample size values, and results from sensitivity checks across multiple initializations, with particular attention to cases of coincident length-scales and axis-angle periodicity. This will demonstrate reliable exploration of the posterior in the identified regimes. revision: yes
Circularity Check
No significant circularity identified
full rationale
The paper's central construction reparameterizes the 6-dimensional manifold of 3x3 SPD matrices via three length-scales and an axis-angle vector mapped through the standard Lie-algebra exponential map exp: so(3) -> SO(3). This is mathematically equivalent to the eigendecomposition M = R Lambda R^T (with R in SO(3)) by the surjectivity of the exponential map and the fact that every SPD admits such a decomposition, but the paper explicitly states the equivalence rather than deriving a new result from it. No load-bearing step reduces by the paper's own equations to a fitted input or prior self-citation; the MCMC symmetries and weak-identification loci are derived as geometric consequences of the parameterization itself. The contribution is the explicit interpretability for priors and posteriors, which does not collapse to the inputs by construction.
Axiom & Free-Parameter Ledger
free parameters (2)
- three principal length-scales
- axis-angle vector (3D)
axioms (2)
- standard math Covariance functions must induce symmetric positive definite matrices
- domain assumption Anisotropy is stationary with a single global orientation
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking echoesWe introduce an interpretable rotationally anisotropic GP kernel that parameterises a three-dimensional SPD covariance metric using three principal length-scales and an explicit SO(3) rotation. The rotation is represented by an axis–angle vector and mapped to SO(3) via the Lie-algebra exponential map
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclearthe construction spans the same family of three-dimensional SPD covariance metrics as a generic full-SPD parameterisation
Reference graph
Works this paper leans on
-
[1]
Sudipto Banerjee, Bradley P. Carlin, and Alan E. Gelfand. 2014.Hierarchical Modeling and Analysis for Spatial Data(2 ed.). Chapman and Hall/CRC, Boca Raton, FL
work page 2014
-
[2]
Timothy D. Barfoot. 2017.State Estimation for Robotics. Cambridge University Press, Cambridge
work page 2017
-
[3]
Dalia Chakrabarty, Nare Gabrielyan, Fabio Rigat, Richard Beanland, and Shashi Paul. 2015. Bayesian Estimation of Density via Multiple Sequential Inversions of Two-Dimensional Images With Application to Electron Microscopy.Technometrics57, 2 (2015), 217–233. doi:10.1080/00401706.2014. 923789
-
[4]
Noel A. C. Cressie. 1993.Statistics for Spatial Data. Wiley, New York, NY
work page 1993
-
[5]
2006.Representing Attitude: Euler Angles, Unit Quaternions, and Rotation Vectors
James Diebel. 2006.Representing Attitude: Euler Angles, Unit Quaternions, and Rotation Vectors. Technical Report. Stanford University. Technical report
work page 2006
-
[6]
Mark D. Ecker and Alan E. Gelfand. 1999. Bayesian Modeling and Inference for Geometrically Anisotropic Spatial Data.Mathematical Geology31, 1 (1999), 67–83. doi:10.1023/A:1007593314277
-
[7]
2020.Differential Geometry and Lie Groups: A Computational Perspective
Jean Gallier and Jocelyn Quaintance. 2020.Differential Geometry and Lie Groups: A Computational Perspective. Geometry and Computing, Vol. 12. Springer, Cham
work page 2020
-
[8]
Alan E. Gelfand, Peter J. Diggle, Peter Guttorp, and Montserrat Fuentes (Eds.). 2010.Handbook of Spatial Statistics. Chapman and Hall/CRC, Boca Raton, FL
work page 2010
-
[9]
Gene H. Golub and Charles F. Van Loan. 2013.Matrix Computations(4 ed.). Johns Hopkins University Press, Baltimore, MD
work page 2013
-
[10]
Francis Sebastian Grassia. 1998. Practical Parameterization of Rotations Using the Exponential Map.Journal of Graphics Tools3, 3 (1998), 29–48
work page 1998
-
[11]
2004.Multiple View Geometry in Computer Vision(2 ed.)
Richard Hartley and Andrew Zisserman. 2004.Multiple View Geometry in Computer Vision(2 ed.). Cambridge University Press, Cambridge
work page 2004
-
[12]
Hannes Kazianka. 2013. Objective Bayesian Analysis of Geometrically Anisotropic Spatial Data.Journal of Agricultural, Biological, and Environmental Statistics18, 4 (2013), 514–537. doi:10.1007/s13253-013-0137-y
-
[13]
Yi Ma, Stefano Soatto, Jana Kosecka, and S. Shankar Sastry. 2004.An Invitation to 3-D Vision: From Images to Geometric Models. Springer, New York, NY
work page 2004
-
[14]
Kanti V. Mardia and Peter E. Jupp. 2000.Directional Statistics. John Wiley & Sons, Chichester
work page 2000
-
[15]
James Murdoch, Chandan Singh, Karl Kumbier, Reza Abbasi-Asl, and Bin Yu
W. James Murdoch, Chandan Singh, Karl Kumbier, Reza Abbasi-Asl, and Bin Yu. 2019. Definitions, Methods, and Applications in Interpretable Machine Learning.Proceedings of the National Academy of Sciences116, 44 (2019), 22071–22080. doi:10.1073/pnas.1900654116
-
[16]
Richard M. Murray, Zexiang Li, and S. Shankar Sastry. 1994.A Mathematical Introduction to Robotic Manipulation. CRC Press, Boca Raton, FL
work page 1994
-
[17]
Radford M. Neal. 1996.Bayesian Learning for Neural Networks. Lecture Notes in Statistics, Vol. 118. Springer, New York, NY
work page 1996
-
[18]
Carl Edward Rasmussen and Christopher K. I. Williams. 2006.Gaussian Processes for Machine Learning. MIT Press, Cambridge, MA
work page 2006
-
[19]
Cynthia Rudin. 2019. Stop Explaining Black Box Machine Learning Models for High Stakes Decisions and Use Interpretable Models Instead.Nature Machine Intelligence1, 5 (2019), 206–215. doi:10.1038/s42256-019-0048-x
-
[20]
Cynthia Rudin, Chaofan Chen, Zhi Chen, Haiyang Huang, Lesia Semenova, and Chudi Zhong. 2022. Interpretable Machine Learning: Fundamental Principles and 10 Grand Challenges.Statistics Surveys16 (2022), 1–85. doi:10.1214/21-SS133
-
[21]
Alexandra M. Schmidt and Alan E. Gelfand. 2003. A Bayesian Coregionalization Approach for Multivariate Pollutant Data.Journal of Geophysical Research: Atmospheres108, D24 (2003), 8783
work page 2003
-
[22]
Malcolm D. Shuster. 1993. A Survey of Attitude Representations.The Journal of the Astronautical Sciences41, 4 (1993), 439–517
work page 1993
-
[23]
Michael L. Stein. 1999.Interpolation of Spatial Data: Some Theory for Kriging. Springer, New York, NY
work page 1999
-
[24]
Liang Wang and Christopher A. Leckie. 2012. Improved Gaussian Process Classification via Feature Space Rotation.Neurocomputing83 (2012), 89–97. doi:10.1016/j.neucom.2011.11.017
-
[25]
Fan Wu, Zhanhong Cheng, Huiyu Chen, Zhijun Qiu, and Lijun Sun. 2024. Traffic State Estimation from Vehicle Trajectories with Anisotropic Gaussian Processes.Transportation Research Part C: Emerging Technologies163 (2024), 104646. doi:10.1016/j.trc.2024.104646
- [26]
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.