Recognition: 2 theorem links
· Lean TheoremPG-3DGS: Optimizing 3D Gaussian Splatting to Satisfy Physics Objectives
Pith reviewed 2026-05-13 06:30 UTC · model grok-4.3
The pith
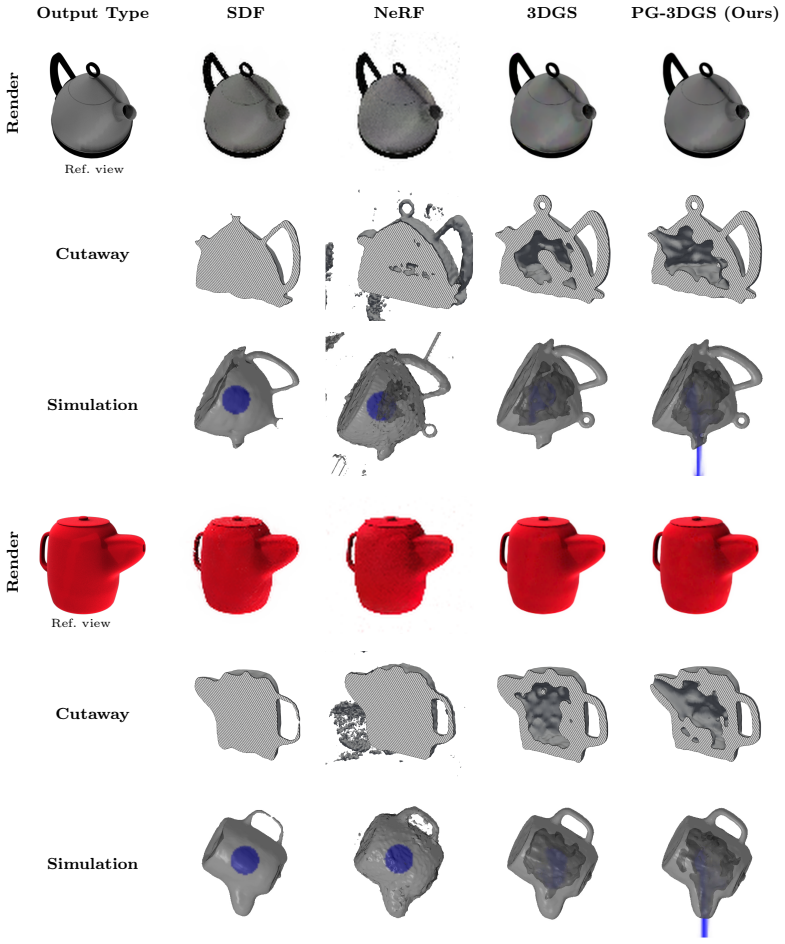
PG-3DGS couples differentiable physics simulation to 3D Gaussian parameters so that optimized shapes satisfy physical objectives such as pouring and lift while keeping visual quality.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By allowing physical objectives to guide the shape optimization process alongside visual losses, PG-3DGS produces geometries that are not only photometrically accurate but also physically functional. The model learns to adjust shapes so that the generated objects exhibit physically meaningful behaviors, for example, teapots that can pour and airplanes that can generate lift, without sacrificing visual quality. Bench-top physical lift tests with 3D-printed aircraft under identical airflow conditions show higher scale-measured lift for PG-3DGS generated structures than an appearance-matching baseline in all three cases.
What carries the argument
The direct coupling of differentiable physics simulation to the parameters of 3D Gaussian splats, which supplies gradients that steer the optimization toward both photometric and physical goals.
If this is right
- Teapots and similar vessels generated by the method pour liquids as intended.
- Aircraft shapes achieve higher lift forces both in simulation and in physical scale tests.
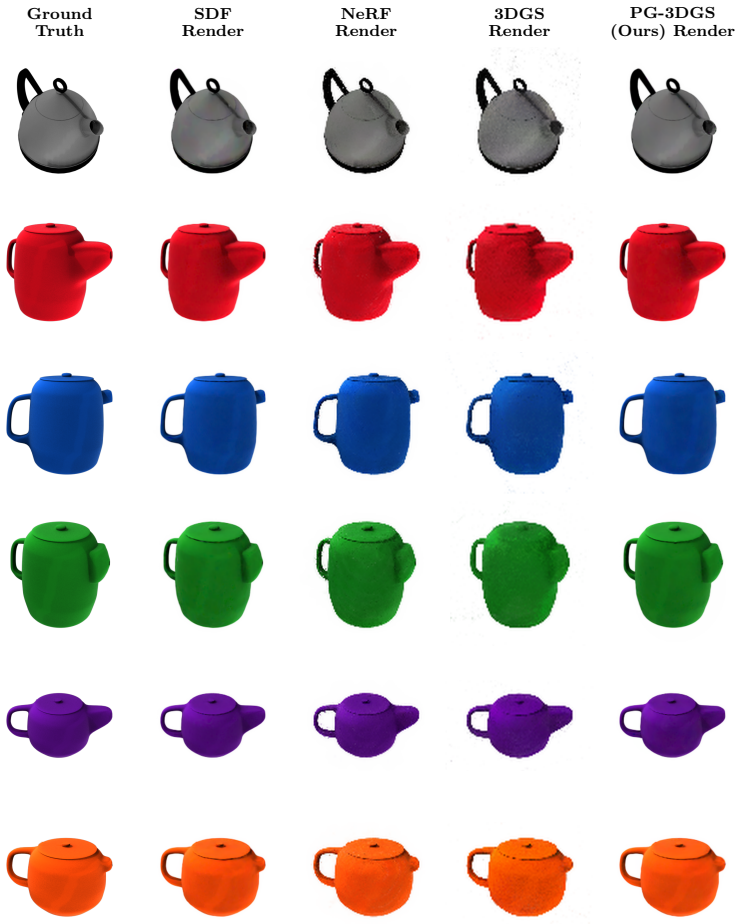
- Visual rendering quality remains comparable to standard 3D Gaussian Splatting.
- The same optimization loop can in principle be applied to other physics objectives once the differentiable simulator is available.
Where Pith is reading between the lines
- The framework could be extended to optimize for additional physical properties such as structural stability or fluid containment.
- Direct use of the optimized Gaussian parameters for manufacturing would remove the usual reconstruction-to-CAD conversion step.
- Similar physics-guided losses might be added to other 3D representations that support differentiable rendering.
Load-bearing premise
Differentiable physics simulation can be coupled directly to the Gaussian parameters without introducing instabilities or requiring task-specific tuning beyond the demonstrated cases.
What would settle it
If a PG-3DGS-optimized airplane is 3D-printed and tested under the same airflow conditions as a visual-only optimized version yet produces equal or lower lift on the scale, the claim of improved physical functionality collapses.
Figures








read the original abstract
Recent advances in Gaussian Splatting have enabled fast, high-fidelity 3D scene generation, yet these methods remain purely visual and lack an understanding of how shapes behave in the physical world. We introduce Physics-Guided 3D Gaussian Splatting (PG-3DGS), a framework that couples differentiable physics simulation with 3D Gaussian representations to generate 3D structures satisfying physics functionalities. By allowing physical objectives to guide the shape optimization process alongside visual losses, our approach produces geometries that are not only photometrically accurate but also physically functional. The model learns to adjust shapes so that the generated objects exhibit physically meaningful behaviors, for example, teapots that can pour and airplanes that can generate lift, without sacrificing visual quality. Experiments on pouring and aerodynamic lift tasks show that PG-3DGS improves physical functionality while preserving visual quality. In addition to simulation gains, bench-top physical lift tests with 3D-printed aircraft (Cessna, B-2 Spirit, and paper plane) under identical airflow conditions show higher scale-measured lift for PG-3DGS, generated structures than an appearance-matching baseline in all three cases. Our unified framework connects appearance-based reconstruction with physics-based reasoning, enabling end-to-end generation of 3D structures that both look realistic and function correctly.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces Physics-Guided 3D Gaussian Splatting (PG-3DGS), which augments standard 3DGS optimization with differentiable physics losses so that the resulting Gaussian parameters produce shapes satisfying both photometric reconstruction and task-specific physical objectives (fluid pouring for teapots; aerodynamic lift for aircraft). Experiments report quantitative gains in simulated physical metrics while preserving visual quality, plus real-world scale measurements on three 3D-printed aircraft showing higher lift for the physics-guided models than an appearance-only baseline.
Significance. If the differentiable coupling between Gaussian parameters and the physics simulator is stable and reproducible, the work provides a concrete bridge between appearance-driven 3D reconstruction and physics-based reasoning. The real-world lift validation on printed models is a notable strength that moves beyond pure simulation. The approach could enable generation of functionally valid 3D assets without post-hoc engineering.
major comments (3)
- [§3] §3 (Method), the paragraph describing the physics coupling: the manuscript does not specify how the continuous Gaussian density field is converted into the input required by the physics simulator (mesh extraction, voxelization, or soft-density treatment). Without this conversion step and its gradient path, it is impossible to verify that back-propagation through means, covariances, and opacities remains stable for contact-rich or turbulent regimes.
- [§4.2] §4.2 (Experiments), the pouring and lift results: the physics loss weight is treated as a free hyper-parameter. No ablation is shown on its sensitivity, nor is it demonstrated that the same weight works across tasks without retuning. This directly bears on the claim that the framework generalizes beyond the two demonstrated tasks.
- [§4.3] §4.3 (Real-world validation): the lift measurements on the three 3D-printed models are reported as uniformly higher, but the manuscript provides no details on printing resolution, surface finishing, exact airflow conditions, or statistical testing. These omissions leave open whether the measured lift differences can be attributed to the physics-guided geometry rather than fabrication or measurement variance.
minor comments (2)
- [Figure 3] Figure 3 caption: the legend for the baseline vs. PG-3DGS curves is difficult to read at print size; consider increasing font size or adding a table of final metric values.
- [§3] Notation: the symbol for the combined loss (visual + physics) is introduced without an explicit equation number; add Eq. (X) for clarity when first used.
Simulated Author's Rebuttal
We thank the referee for their thorough review and constructive comments. We address each of the major comments below and will revise the manuscript accordingly to improve clarity and completeness.
read point-by-point responses
-
Referee: [§3] §3 (Method), the paragraph describing the physics coupling: the manuscript does not specify how the continuous Gaussian density field is converted into the input required by the physics simulator (mesh extraction, voxelization, or soft-density treatment). Without this conversion step and its gradient path, it is impossible to verify that back-propagation through means, covariances, and opacities remains stable for contact-rich or turbulent regimes.
Authors: We agree that this information is essential for reproducibility and verification. We will revise the manuscript to fully specify the conversion from the Gaussian density field to the physics simulator's input format, along with the corresponding gradient propagation path. This addition will address concerns regarding stability in contact-rich or turbulent regimes. revision: yes
-
Referee: [§4.2] §4.2 (Experiments), the pouring and lift results: the physics loss weight is treated as a free hyper-parameter. No ablation is shown on its sensitivity, nor is it demonstrated that the same weight works across tasks without retuning. This directly bears on the claim that the framework generalizes beyond the two demonstrated tasks.
Authors: We acknowledge the value of such an ablation for supporting generalizability. We will add experiments in the revised version that ablate the physics loss weight across a range of values for both the pouring and lift tasks, reporting effects on physical performance and visual fidelity. We will also demonstrate the use of a consistent weight across tasks. revision: yes
-
Referee: [§4.3] §4.3 (Real-world validation): the lift measurements on the three 3D-printed models are reported as uniformly higher, but the manuscript provides no details on printing resolution, surface finishing, exact airflow conditions, or statistical testing. These omissions leave open whether the measured lift differences can be attributed to the physics-guided geometry rather than fabrication or measurement variance.
Authors: We thank the referee for this feedback. We will update the real-world validation section to include specifics on the 3D printing parameters (resolution and material), surface finishing process, exact airflow conditions during testing, and results of statistical analysis (including means, variances, and significance tests) over repeated measurements to confirm that the lift differences are due to the optimized geometry. revision: yes
Circularity Check
No significant circularity; physics objectives are externally sourced
full rationale
The paper's central derivation couples an external differentiable physics simulator to 3D Gaussian parameters for tasks such as pouring and lift generation. Physical objectives (fluid flow, lift coefficients) originate from the simulator rather than being defined in terms of the fitted Gaussian means, covariances, or opacities. No equations reduce the claimed prediction to a self-fit, no load-bearing self-citations are invoked to justify uniqueness, and no ansatz is smuggled via prior author work. The optimization simply adds independent physics losses to visual losses, preserving self-contained structure against external benchmarks.
Axiom & Free-Parameter Ledger
free parameters (1)
- physics loss weight
axioms (1)
- domain assumption Differentiable physics simulator exists and is stable for the chosen tasks
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We construct an efficient and scalable soft occupancy / solid mask on the simulation grid as a differentiable function of the Gaussian parameters... Brinkman penalization term... λ χ(x;θ) (usolid(x)−u(x))
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
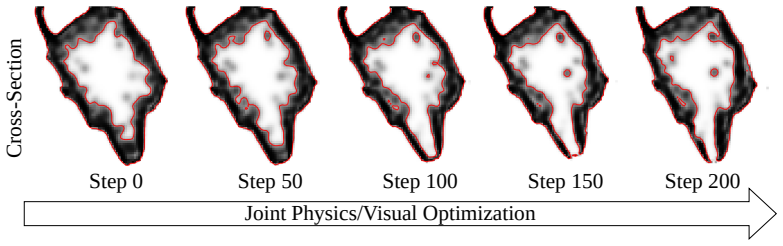
J(θ;I,Φ)=Lvis(θ;I)+Lphys(θ;Φ)+Lreg(θ) ... staged procedure: (i) initialization phase optimizing Lvis only ... (ii) joint phase
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
L. Yang, Z. Zhang, Y. Song, S. Hong, R. Xu, Y. Zhao, W. Zhang, B. Cui, M.-H. Yang, Diffusion models: A comprehensive survey of methods and applications, ACM Comput. Surv. 56 (4) (Nov. 2023). doi:10.1145/3626235. URLhttps://doi.org/10.1145/3626235 40
-
[2]
Z. Xing, Q. Feng, H. Chen, Q. Dai, H. Hu, H. Xu, Z. Wu, Y.-G. Jiang, A survey on video diffusion models, ACM Comput. Surv. 57 (2) (Nov. 2024).doi:10.1145/3696415. URLhttps://doi.org/10.1145/3696415
-
[3]
W. X. Zhao, K. Zhou, J. Li, T. Tang, X. Wang, Y. Hou, Y. Min, B. Zhang, J. Zhang, Z. Dong, Y. Du, C. Yang, Y. Chen, Z. Chen, J. Jiang, R. Ren, Y. Li, X. Tang, Z. Liu, P. Liu, J.-Y. Nie, J.-R. Wen, A survey of large language models, arXiv preprint arXiv:2303.18223 (2023). URLhttp://arxiv.org/abs/2303.18223
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[4]
2451–2463,https://worldmodels.github.io
D.Ha, J.Schmidhuber, Recurrentworldmodelsfacilitatepolicyevolution, in: Advances in Neural Information Processing Systems 31, Curran As- sociates, Inc., 2018, pp. 2451–2463,https://worldmodels.github.io. URL https://papers.nips.cc/paper/ 7512-recurrent-world-models-facilitate-policy-evolution
work page 2018
-
[5]
J. Ding, Y. Zhang, Y. Shang, Y. Zhang, Z. Zong, J. Feng, Y. Yuan, H. Su, N. Li, N. Sukiennik, et al., Understanding world or predicting future? a comprehensive survey of world models, ACM Computing Surveys 58 (3) (2025) 1–38
work page 2025
-
[6]
B. Mildenhall, B. Mildenhall, P. P. Srinivasan, P. P. Srinivasan, M. Tancik, M.Tancik, J.T.Barron, J.T.Barron, R.Ramamoorthi, R.Ramamoorthi, R. Ng, R. Ng, NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis, arXiv: Computer Vision and Pattern Recognition (2020).doi:10.1145/3503250
-
[7]
https://doi.org/10.1145/3592433 Xiaonan Kong and Riley G
B. Kerbl, G. Kopanas, T. Leimkühler, G. Drettakis, 3D Gaussian Splat- ting for Real-Time Radiance Field Rendering, ACM Transactions on Graphics (2023).doi:10.1145/3592433
- [8]
-
[9]
C.-H. Lin, J. Gao, L. Tang, T. Takikawa, X. Zeng, X. Huang, K. Kreis, S. Fidler, M.-Y. Liu, T.-Y. Lin, Magic3d: High-resolution text-to-3d content creation, in: IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2023. 41
work page 2023
- [10]
-
[11]
J. Tang, J. Ren, H. Zhou, Z. Liu, G. Zhang, DreamGaussian: Generative Gaussian Splatting for Efficient 3D Content Creation, International Conference on Learning Representations (2023).doi:10.48550/arxiv. 2309.16653
work page internal anchor Pith review doi:10.48550/arxiv 2023
-
[12]
Z. Liang, Q. Zhang, Y. Feng, Y. Shan, K. Jia, GS-IR: 3D Gaussian Splat- ting for Inverse Rendering, Computer Vision and Pattern Recognition (2023).doi:10.1109/cvpr52733.2024.02045
- [13]
-
[14]
C. Schenck, D. Fox, SPNets: Differentiable Fluid Dynamics for Deep Neural Networks, Conference on Robot Learning (2018).doi:null
work page 2018
-
[15]
M. Xu, C.-y. Song, D. Levin, D. Hyde, A Differentiable Material Point Method Framework for Shape Morphing, IEEE Transactions on Visualiza- tion and Computer Graphics (2024).doi:10.1109/tvcg.2025.3591729
-
[16]
Y. Hu, Y. Hu, L. Anderson, L. Anderson, T.-M. Li, T.-M. Li, Q. Sun, Q. Sun, N. Carr, N. A. Carr, J. Ragan-Kelley, J. Ragan-Kelley, F. Du- rand, F. Durand, DiffTaichi: Differentiable Programming for Physical Simulation, International Conference on Learning Representations (2019). doi:null
work page 2019
-
[17]
P. Holl, V. Koltun, K. Um, N. Thuerey, phiflow: A Differentiable PDE Solving Framework for Deep Learning via Physical Simulations (2020). URLhttps://telecom-paris.hal.science/hal-03142278
work page 2020
-
[18]
T. Takahashi, J. Liang, Y.-L. Qiao, M. C. Lin, Differentiable Fluids with Solid Coupling for Learning and Control, AAAI Conference on Artificial Intelligence (2021).doi:10.1609/aaai.v35i7.16764
-
[19]
A. Franz, H. Wei, L. Guastoni, N. Thuerey, PICT - A Differentiable, GPU- Accelerated Multi-Block PISO Solver for Simulation-Coupled Learning 42 Tasks in Fluid Dynamics, Journal of Computational Physics (2025). doi:10.48550/arxiv.2505.16992
-
[20]
M. Raissi, P. Perdikaris, G. Karniadakis, Physics-informed neu- ral networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equa- tions, Journal of Computational Physics 378 (2019) 686–707. doi:https://doi.org/10.1016/j.jcp.2018.10.045. URL https://www.sciencedirect.com/science/article/pii/ S00...
-
[21]
G. E. Karniadakis, I. G. Kevrekidis, L. Lu, P. Perdikaris, S. Wang, L. Yang, Physics-informed machine learning, Nature Reviews Physics 3 (6) (2021) 422–440.doi:10.1038/s42254-021-00314-5. URLhttps://doi.org/10.1038/s42254-021-00314-5
-
[22]
S. Wang, Y. Teng, P. Perdikaris, Understanding and mitigating gradient flow pathologies in physics-informed neural networks, SIAM Journal on Scientific Computing 43 (5) (2021) A3055–A3081.arXiv:https: //doi.org/10.1137/20M1318043,doi:10.1137/20M1318043. URLhttps://doi.org/10.1137/20M1318043
-
[23]
Y. Feng, X. Feng, Y. Shang, Y. Jiang, C. Yu, Z. Zong, T. Shao, H. Wu, K. Zhou, C. Jiang, Y. Yang, Gaussian Splashing: Unified Particles for Versatile Motion Synthesis and Rendering, Computer Vision and Pattern Recognition (2024).doi:10.1109/cvpr52734.2025.00057
-
[24]
T. Zhang, H.-X. Yu, R. Wu, B. Y. Feng, C. Zheng, N. Snavely, J. Wu, W. T. Freeman, PhysDreamer: Physics-based interaction with 3d objects via video generation, in: European Conference on Computer Vision, Springer, 2024
work page 2024
-
[25]
B. Chen, H. Jiang, S. Liu, S. Gupta, Y. Li, H. Zhao, S. Wang, Physgen3d: Crafting a miniature interactive world from a single image, CVPR (2025)
work page 2025
-
[26]
P. Dhariwal, A. Nichol, Diffusion Models Beat GANs on Image Synthesis, Neural Information Processing Systems (2021).doi:null
work page 2021
-
[27]
J. Ho, J. Ho, T. Salimans, T. Salimans, Classifier-Free Diffusion Guidance, arXiv.org (2022).doi:10.48550/arxiv.2207.12598. 43
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2207.12598 2022
-
[28]
Deep Unsupervised Learning using Nonequilibrium Thermodynamics
J. Sohl-Dickstein, E. A. Weiss, N. Maheswaranathan, S. Ganguli, Deep Unsupervised Learning using Nonequilibrium Thermodynamics, arXiv:1503.03585 [cond-mat, q-bio, stat] (Nov. 2015).doi:10.48550/ arXiv.1503.03585. URLhttp://arxiv.org/abs/1503.03585
work page internal anchor Pith review arXiv 2015
-
[29]
Y. Song, S. Ermon, Generative Modeling by Estimating Gradients of the Data Distribution, arXiv:1907.05600 [cs, stat] (Oct. 2020). doi: 10.48550/arXiv.1907.05600. URLhttp://arxiv.org/abs/1907.05600
-
[30]
F.-A. Croitoru, V. Hondru, R. T. Ionescu, M. Shah, Diffusion Models in Vision: A Survey, IEEE Transactions on Pattern Analysis and Machine Intelligence 45 (9) (2023) 10850–10869, arXiv:2209.04747 [cs]. doi: 10.1109/TPAMI.2023.3261988. URLhttp://arxiv.org/abs/2209.04747
- [31]
-
[32]
R. Bridson, Fluid Simulation for Computer Graphics, CRC Press, Taylor & Francis Group, CRC Press is an imprint of the Taylor & Francis Group, an informa Business, 2016
work page 2016
-
[33]
A. Chorin, Numerical solution of the navier–stokes equations, Mathe- matics of Computation 22 (10 1968).doi:10.2307/2004575
-
[34]
J. Stam, J. Stam, Stable fluids, International Conference on Computer Graphics and Interactive Techniques (1999). doi:10.1145/311535. 311548
-
[35]
Z. Lee, [dataset] pg-3dgs supporting dataset: Multiview teapot and airplane images, depth maps, masks, and camera parameters (2026). doi:10.17632/xz7tkg2zhd.1. URLhttps://doi.org/10.17632/xz7tkg2zhd.1
-
[36]
Z. Lee, M. Jacobson, Y. Xue, Physics-guided 3d gaussian splatting official implementation [software] (2026).doi:10.5281/zenodo.19392335. URLhttps://doi.org/10.5281/zenodo.19392335 44
-
[37]
L. Yariv, J. Gu, Y. Kasten, Y. Lipman, Volume rendering of neural implicit surfaces, in: Thirty-Fifth Conference on Neural Information Processing Systems, 2021. Appendix A. Efficient tiled evaluation of the Gaussian-induced solid mask This appendix describes an efficient strategy for evaluating the Gaussian- induced solid mask defined in Sec. 5.3.1. The m...
work page 2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.