Recognition: 1 theorem link
· Lean TheoremDistance-Constrained Unlabeled Multi-Agent Pathfinding
Pith reviewed 2026-05-13 02:13 UTC · model grok-4.3
The pith
Distance-constrained unlabeled multi-agent pathfinding has PSPACE-complete feasibility unlike standard MAPF.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
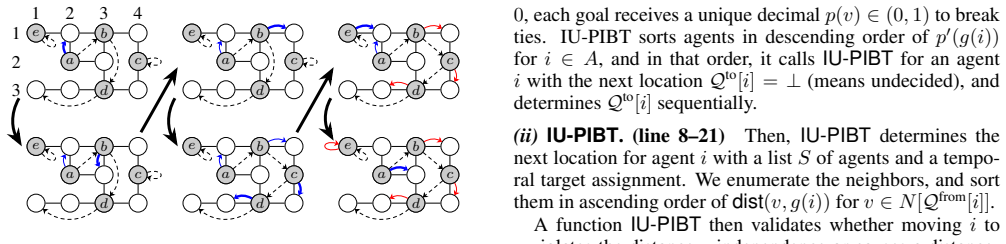
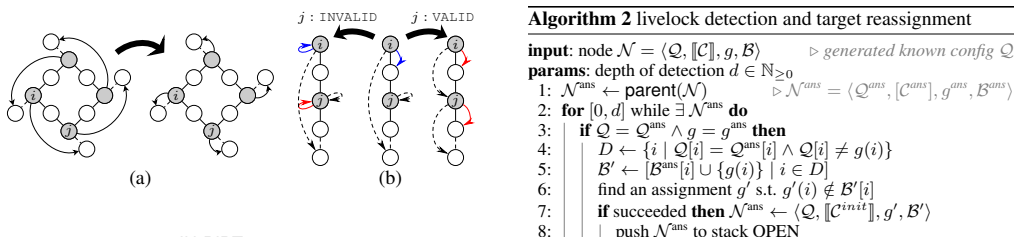
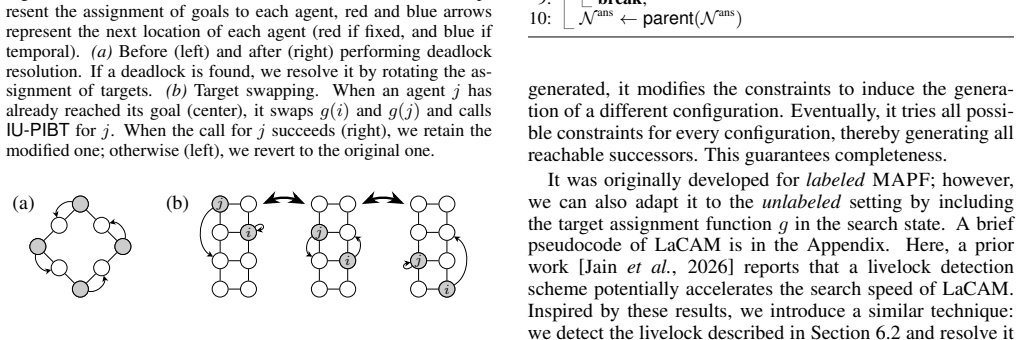
We introduce Distance-r Independent Unlabeled Multi-Agent Pathfinding, the task of finding collision-free paths for unlabeled agents on an undirected graph such that every pair of agents remains at least distance r+1 apart at every time step. We prove that deciding whether a solution exists is PSPACE-complete. We then give two complementary algorithms: reduction-based optimal solvers that employ a feasibility-preserving compression step, and a configuration-generator search procedure. Empirical evaluation shows that these algorithms solve instances with hundreds of agents in practical time.
What carries the argument
The static pairwise distance-r independence constraint on an undirected graph, enforced at every time step, together with a feasibility-preserving compression procedure that reduces the state space for optimal search.
If this is right
- Feasibility of distance-constrained unlabeled MAPF cannot be decided in polynomial time unless PSPACE equals P.
- Optimal solutions can be obtained by first compressing the instance while keeping feasibility unchanged.
- Configuration-based search offers a scalable alternative when optimal cost is not required.
- Instances with hundreds of agents remain solvable in practice despite the theoretical hardness.
Where Pith is reading between the lines
- Real-world multi-robot systems that enforce safety distances may inherit the same computational limits shown here.
- The compression technique could be adapted to other persistent constraints such as time-window or capacity limits.
- The contrast with standard unlabeled MAPF suggests that labeling agents or relaxing distance rules can restore tractability in some settings.
Load-bearing premise
The distance constraint is expressed as a fixed minimum separation between every pair of agents on a static undirected graph, and the hardness reduction does not introduce feasibility artifacts absent from real instances.
What would settle it
A polynomial-time algorithm that correctly decides feasibility for arbitrary r greater than or equal to 1 on arbitrary graphs would falsify the PSPACE-completeness result.
Figures



read the original abstract
We study a graph pathfinding problem Distance-$r$ Independent Unlabeled Multi-Agent Pathfinding, finding a set of collision-free paths between two sets where agents must stay at pairwise distance at least $r+1$ at all times. This additional constraint, generalizing collision modeling for classical MAPF, targets aspects of real-world multi-agent coordination. This additional distance constraint makes feasibility (i.e., whether a solution exists) PSPACE-complete, in contrast to standard (unlabeled) MAPF, where it can be decided in polynomial time. We address the challenge via two complementary approaches: (i) reduction-based optimal algorithms with a feasibility-preserving compression procedure, and (ii) a configuration generator-based search. Despite the hardness, empirical results show that our algorithm can handle hundreds of agents in a practical timeframe.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces Distance-r Independent Unlabeled Multi-Agent Pathfinding (DIUMAPF), a variant of unlabeled MAPF on graphs in which agents must maintain a static pairwise distance of at least r+1 at every time step. It proves that deciding feasibility is PSPACE-complete for r ≥ 1 (via a reduction that preserves feasibility), while the r = 0 case remains polynomial-time decidable. Two algorithmic approaches are presented: reduction-based optimal solvers that employ a feasibility-preserving compression procedure, and a configuration-generator search. Empirical results indicate that the methods scale to instances with hundreds of agents.
Significance. If the reduction is valid and the compression procedure correctly preserves feasibility, the work is significant because it demonstrates how a realistic generalization of collision avoidance changes the complexity class of an otherwise tractable problem, while supplying practical algorithms that remain effective at scale. The explicit contrast with standard unlabeled MAPF and the dual theoretical/practical treatment are strengths.
major comments (2)
- [Hardness proof section] The reduction establishing PSPACE-completeness (presumably in the hardness section) must be checked to confirm that the distance-r constraint is enforced uniformly in the constructed instances and does not introduce spurious infeasibility artifacts not present in the source problem.
- [Algorithm section on reduction-based solvers] The feasibility-preserving compression procedure (used in the reduction-based optimal algorithms) is load-bearing for correctness; its description should explicitly state the invariants maintained and any conditions under which compression is safe.
minor comments (2)
- [Abstract] The abstract states the main complexity result and empirical scaling but omits even a one-sentence sketch of the reduction or the compression step; adding such a sketch would improve accessibility without lengthening the abstract appreciably.
- [Experimental evaluation] Experimental reporting should include the range of r values tested, the graph families used, and the precise definition of 'practical timeframe' (e.g., timeout limits and hardware) to allow replication and assessment of the scalability claim.
Simulated Author's Rebuttal
We thank the referee for the positive assessment and the recommendation for minor revision. The comments are constructive and help strengthen the presentation of the theoretical and algorithmic contributions. We address each major comment below.
read point-by-point responses
-
Referee: [Hardness proof section] The reduction establishing PSPACE-completeness (presumably in the hardness section) must be checked to confirm that the distance-r constraint is enforced uniformly in the constructed instances and does not introduce spurious infeasibility artifacts not present in the source problem.
Authors: We have re-verified the reduction presented in Section 4. The construction is designed so that the distance-r constraint is enforced uniformly in every time step of the constructed DIUMAPF instance, with gadgets that directly encode the source problem's constraints. Any potential violation of the distance constraint in the target instance corresponds exactly to an invalid move or configuration in the source problem, without introducing extraneous infeasibility. To address the request for explicit confirmation, we will insert a short clarifying paragraph immediately after the reduction statement that restates this equivalence invariant. revision: yes
-
Referee: [Algorithm section on reduction-based solvers] The feasibility-preserving compression procedure (used in the reduction-based optimal algorithms) is load-bearing for correctness; its description should explicitly state the invariants maintained and any conditions under which compression is safe.
Authors: We agree that the current description of the compression procedure in Section 5.1 would benefit from greater explicitness. The procedure maintains the invariant that every feasible path in the original configuration space maps to a feasible path in the compressed space (and vice versa) while preserving the distance-r constraint. Compression is safe precisely when the underlying graph is undirected, the distance constraint is static, and there are no dynamic obstacles. We will revise the subsection to list these invariants and safety conditions in a dedicated paragraph. revision: yes
Circularity Check
No significant circularity detected
full rationale
The central claim is a PSPACE-completeness result for Distance-r Independent Unlabeled MAPF obtained via a standard graph-theoretic reduction from a known hard problem, contrasted against the established polynomial-time decidability of ordinary unlabeled MAPF. No equations, fitted parameters, self-definitional constructions, or load-bearing self-citations appear in the provided abstract or described derivation chain. The practical algorithms are presented as complementary heuristics that do not redefine or presuppose the complexity result. The reduction is asserted to preserve feasibility without circularity.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
feasibility ... PSPACE-complete ... reduction-based optimal algorithms ... configuration generator-based search
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Lukas Heuer and Luigi Palmieri and Anna Mannucci and Sven Koenig and Martin Magnusson , title =. 2024 , url =. doi:10.1109/ICRA57147.2024.10611005 , timestamp =
-
[2]
Sturtevant and Ariel Felner and Sven Koenig and Hang Ma and Thayne T
Roni Stern and Nathan R. Sturtevant and Ariel Felner and Sven Koenig and Hang Ma and Thayne T. Walker and Jiaoyang Li and Dor Atzmon and Liron Cohen and T. K. Satish Kumar and Roman Bart. Multi-Agent Pathfinding: Definitions, Variants, and Benchmarks , booktitle = socs, year =
-
[3]
Guni Sharon and Roni Stern and Ariel Felner and Nathan R. Sturtevant , title =. Artif. Intell. , volume =. 2015 , url =. doi:10.1016/J.ARTINT.2014.11.006 , timestamp =
-
[4]
Priority Inheritance with Backtracking for Iterative Multi-agent Path Finding , journal =. 2022 , issn =. doi:https://doi.org/10.1016/j.artint.2022.103752 , author =
-
[5]
Baiyu Li and Hang Ma , title =. 2023 , url =. doi:10.1109/LRA.2023.3272272 , timestamp =
-
[6]
Proceedings of the International Symposium on Combinatorial Search , author=
Which MAPF Model Works Best for Automated Warehousing? , volume=. Proceedings of the International Symposium on Combinatorial Search , author=. 2022 , month=. doi:10.1609/socs.v15i1.21767 , number=
-
[7]
Reconfiguration Using Generalized Token Jumping , booktitle = walcom, volume =
Jan Maty. Reconfiguration Using Generalized Token Jumping , booktitle = walcom, volume =. 2025 , url =
work page 2025
-
[8]
Boris de Wilde and Adriaan ter Mors and Cees Witteveen , title =. J. Artif. Intell. Res. , volume =. 2014 , url =. doi:10.1613/JAIR.4447 , timestamp =
-
[9]
Solving Simultaneous Target Assignment and Path Planning Efficiently with Time-Independent Execution , journal =. 2023 , issn =. doi:https://doi.org/10.1016/j.artint.2023.103946 , author =
-
[10]
Valentin Bartier and Nicolas Bousquet and Amer E. Mouawad , title =. J. Comput. Syst. Sci. , volume =. 2023 , doi =
work page 2023
-
[11]
Pavel Surynek and Ariel Felner and Roni Stern and Eli Boyarski , title =. 2016 , doi =
work page 2016
- [12]
-
[13]
Cygan, Marek and Fomin, Fedor V. and Kowalik, Lukasz and Lokshtanov, Daniel and Marx, Daniel and Pilipczuk, Marcin and Pilipczuk, Michal and Saurabh, Saket , title =. 2015 , isbn =
work page 2015
-
[14]
Non-Optimal Multi-Agent Pathfinding is Solved (Since 1984) , booktitle =
Gabriele R. Non-Optimal Multi-Agent Pathfinding is Solved (Since 1984) , booktitle =. 2012 , url =. doi:10.1609/SOCS.V3I1.18267 , timestamp =
- [15]
-
[16]
URLhttps://doi.org/10.1609/aaai.v36i9.21266
MAPF-LNS2: Fast Repairing for Multi-Agent Path Finding via Large Neighborhood Search , volume=. Proceedings of the AAAI Conference on Artificial Intelligence , author=. 2022 , month=. doi:10.1609/aaai.v36i9.21266 , number=
-
[17]
Subdimensional expansion for multirobot path planning , journal =
Glenn Wagner and Howie Choset , keywords =. Subdimensional expansion for multirobot path planning , journal =. 2015 , issn =. doi:https://doi.org/10.1016/j.artint.2014.11.001 , url =
- [18]
-
[19]
Hönig, Wolfgang and Preiss, James A. and Kumar, T. K. Satish and Sukhatme, Gaurav S. and Ayanian, Nora , journal=tro, title=. 2018 , volume=
work page 2018
-
[20]
Spacing Policies for Adaptive Cruise Control: A Survey , year=
Wu, Cunxue and Xu, Zhongming and Liu, Yang and Fu, Chunyun and Li, Kuining and Hu, Minghui , journal=. Spacing Policies for Adaptive Cruise Control: A Survey , year=
- [21]
-
[22]
Solovey, Kiril and Halperin, Dan , title =. 2016 , issue_date =. doi:10.1177/0278364916672311 , journal =
-
[23]
Li, Jiaoyang and Surynek, Pavel and Felner, Ariel and Ma, Hang and Kumar, T. K. Satish and Koenig, Sven , year=. Multi-Agent Path Finding for Large Agents , volume=. doi:10.1609/aaai.v33i01.33017627 , number=
-
[24]
Proceedings of the International Conference on Automated Planning and Scheduling , author=
Any-Angle Pathfinding for Multiple Agents Based on SIPP Algorithm , volume=. Proceedings of the International Conference on Automated Planning and Scheduling , author=. 2017 , month=. doi:10.1609/icaps.v27i1.13856 , number=
-
[25]
Takehiro Ito and Erik D. Demaine and Nicholas J.A. Harvey and Christos H. Papadimitriou and Martha Sideri and Ryuhei Uehara and Yushi Uno , keywords =. On the complexity of reconfiguration problems , journal =. 2011 , issn =. doi:https://doi.org/10.1016/j.tcs.2010.12.005 , url =
-
[26]
Mouawad and Naomi Nishimura and Sebastian Siebertz , keywords =
Nicolas Bousquet and Amer E. Mouawad and Naomi Nishimura and Sebastian Siebertz , keywords =. A survey on the parameterized complexity of reconfiguration problems , journal =. 2024 , issn =. doi:https://doi.org/10.1016/j.cosrev.2024.100663 , url =
-
[27]
Bo Fu and Zhe Chen and Rahul Chandan and Alex Barbosa and Michael Caldara and Joey Durham and Federico Pecora , title =
-
[28]
A Scalable Post-Processing Pipeline for Large-Scale Free-Space Multi-Agent Path Planning with PiBT , author=. 2025 , eprint=
work page 2025
-
[29]
Takahiro Suzuki and Keisuke Okumura , title =. ArXiv preprint , volume =. 2025 , url =
work page 2025
-
[30]
Robust Multi-Agent Path Finding and Executing , journal =
Dor Atzmon and Roni Stern and Ariel Felner and Glenn Wagner and Roman Bart. Robust Multi-Agent Path Finding and Executing , journal =. 2020 , url =. doi:10.1613/JAIR.1.11734 , timestamp =
- [31]
-
[32]
Vassilissa Lehoux. Multi-Agent Path Finding with Real Robot Dynamics and Interdependent Tasks for Automated Warehouses , booktitle = ecai, volume =. 2024 , url =
work page 2024
-
[33]
Offline Time-Independent Multiagent Path Planning , year=
Okumura, Keisuke and Bonnet, François and Tamura, Yasumasa and Défago, Xavier , journal=. Offline Time-Independent Multiagent Path Planning , year=
-
[34]
Tomer Shahar and Shashank Shekhar and Dor Atzmon and Abdallah Saffidine and Brendan Juba and Roni Stern , title =. J. Artif. Intell. Res. , volume =. 2021 , url =. doi:10.1613/JAIR.1.12397 , timestamp =
-
[35]
DPLL(MAPF): an Integration of Multi-Agent Path Finding and SAT Solving Technologies , volume=
Čapek, Martin and Surynek, Pavel , year=. DPLL(MAPF): an Integration of Multi-Agent Path Finding and SAT Solving Technologies , volume=. doi:10.1609/socs.v12i1.18567 , number=
-
[36]
Graph Attention-Guided Search for Dense Multi-Agent Pathfinding , author=
-
[37]
Robert A. Hearn and Erik D. Demaine , title =. Theor. Comput. Sci. , volume =. 2005 , url =. doi:10.1016/J.TCS.2005.05.008 , timestamp =
-
[38]
Zur allgemeinen Kurventheorie , url =
Menger, Karl , journal =. Zur allgemeinen Kurventheorie , url =
-
[39]
Ma, Hang and Koenig, Sven , title =. AI Matters , url =. 2017 , issue_date =
work page 2017
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.