Recognition: 2 theorem links
· Lean TheoremSampling-Based Follow-the-Leader Motion Planning for Manipulator-Mounted Continuum Robots
Pith reviewed 2026-05-13 01:24 UTC · model grok-4.3
The pith
A sampling-based planner enables follow-the-leader motion for continuum robots on manipulators by using closed-form base pose calculation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
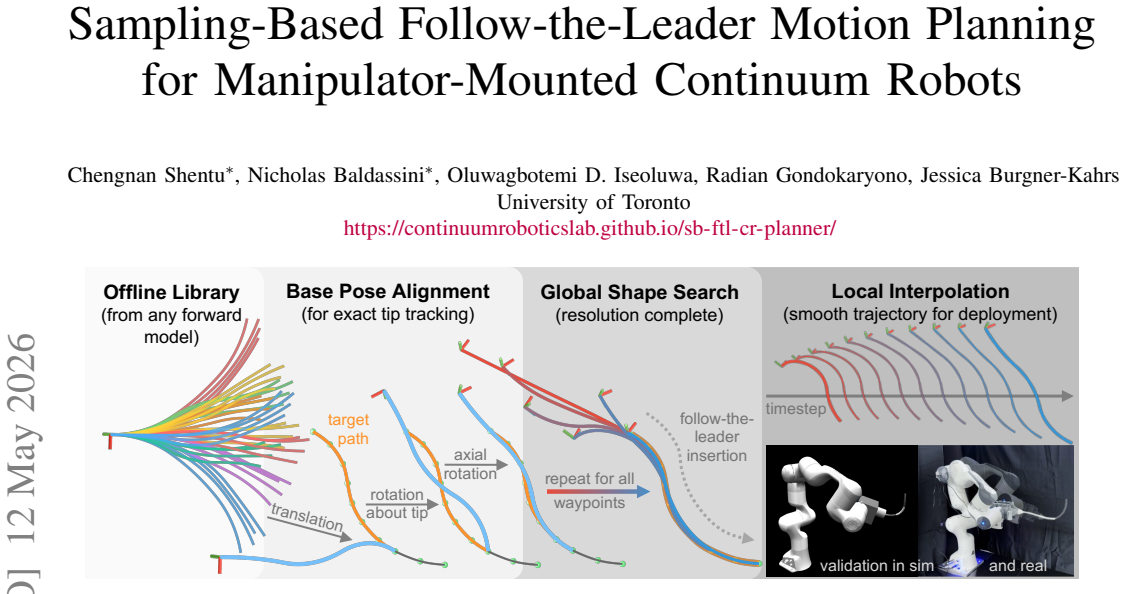
The planner jointly searches robot configurations and base poses for follow-the-leader motion by sampling shapes, determining each base pose through closed-form geometry, and guaranteeing resolution-complete coverage plus converging tip tracking over waypoints and interpolated segments.
What carries the argument
The closed-form geometric construction that computes a valid base pose for any sampled shape while preserving the follow-the-leader property.
If this is right
- The method supports arbitrary forward kinematics models without online optimization loops.
- Shape search is resolution complete.
- Tip tracking converges throughout waypoint traversal and interpolation.
- Planning reaches 100 percent success with zero tip error and 1.9 percent mean shape deviation relative to robot length in simulation.
- The approach transfers to physical hardware consisting of a 6-DOF tendon-driven continuum robot on a serial manipulator.
Where Pith is reading between the lines
- The same decoupling of configuration search from base placement could apply to other robots whose motion is constrained by a moving attachment point.
- Offline precomputation of base poses may support real-time replanning when the environment changes.
- Integration with sensor feedback could allow the planner to correct for model inaccuracies during execution.
- The technique suggests a template for other constrained planning problems where global shape and local attachment must be solved together.
Load-bearing premise
A closed-form geometric construction can always determine a valid base pose for any sampled shape without violating the follow-the-leader property or requiring iterative optimization.
What would settle it
A shape sample or workspace region where the closed-form construction yields no valid base pose that satisfies follow-the-leader constraints, preventing the planner from returning a feasible path.
Figures




read the original abstract
Follow-the-leader (FTL) motion exploits the unique morphology of continuum robots (CRs) to navigate confined spaces by having the body retrace the path of the tip. While extensively studied, existing FTL methods typically assume a fixed base or a single degree-of-freedom insertion mechanism, limiting their applicability to practical systems in which CRs are mounted on robotic manipulators with fully actuated SE(3) base pose. This paper presents a sampling-based motion planner for FTL motion of manipulator-mounted CRs that jointly considers robot configuration and base pose. The key idea is to decouple global shape search from base pose determination by computing the base pose through a closed-form geometric construction, thereby avoiding iterative optimization during online planning. The approach supports general forward models and enables efficient planning by shifting the majority of computation offline. We establish theoretical guarantees including resolution complete shape search and converging tip tracking throughout waypoint traversal and interpolation. Experiments on 120 simulated paths over 3 test classes demonstrate 0% tip error and 1.9% mean shape deviation (w.r.t. robot length) at 100% success rate. We validate the practicality of our approach on a 6-DOF tendon-driven CR mounted on a serial manipulator. Code and visualization available at https://continuumroboticslab.github.io/sb-ftl-cr-planner/.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a sampling-based motion planner for follow-the-leader (FTL) motion of continuum robots mounted on fully actuated manipulators with SE(3) base. The core idea is to decouple global shape sampling from base-pose computation via a closed-form geometric construction that avoids online iterative optimization, while supporting general forward kinematics models. Theoretical guarantees include resolution-complete shape search and converging tip tracking during waypoint traversal and interpolation. Experiments report 0% tip error, 1.9% mean shape deviation (w.r.t. robot length), and 100% success on 120 simulated paths across three test classes, with hardware validation on a 6-DOF tendon-driven CR mounted on a serial manipulator.
Significance. If the closed-form base-pose construction reliably preserves the FTL property for arbitrary sampled shapes under general forward models without singularities or fallback optimization, the work would be significant for practical continuum-robot deployment in confined spaces. Shifting the bulk of computation offline while retaining formal guarantees and strong empirical performance (perfect tip tracking, low deviation, full success) would represent a meaningful advance over fixed-base or single-DOF FTL methods.
major comments (1)
- [§3.2] §3.2 (Base-pose geometric construction): The claim that a closed-form construction always determines a valid base pose preserving the FTL property exactly for any sampled shape under general forward models is load-bearing for the decoupling argument, the resolution-completeness guarantee, and the reported 100% success rate. The manuscript must supply either a formal proof that the construction succeeds without violation for arbitrary shapes or an exhaustive analysis of failure modes (singularities, workspace limits, non-invertibility), as the stress-test concern directly questions whether this holds beyond the tested cases.
minor comments (3)
- [§5] The abstract and §5 state 'resolution complete shape search' but do not specify the sampling resolution or discretization parameters used for the 120 paths; adding these values would strengthen reproducibility.
- Notation for the forward model and shape parameterization should be introduced once with a single consistent symbol set rather than re-defined across sections.
- [Hardware Experiments] Hardware validation paragraph mentions a 6-DOF tendon-driven CR but lacks quantitative metrics comparable to the simulation results (e.g., measured tip error); including them would improve the empirical section.
Simulated Author's Rebuttal
We thank the referee for their constructive review and for recognizing the potential impact of our sampling-based FTL planner. We address the single major comment below and will incorporate revisions to strengthen the theoretical presentation.
read point-by-point responses
-
Referee: [§3.2] §3.2 (Base-pose geometric construction): The claim that a closed-form construction always determines a valid base pose preserving the FTL property exactly for any sampled shape under general forward models is load-bearing for the decoupling argument, the resolution-completeness guarantee, and the reported 100% success rate. The manuscript must supply either a formal proof that the construction succeeds without violation for arbitrary shapes or an exhaustive analysis of failure modes (singularities, workspace limits, non-invertibility), as the stress-test concern directly questions whether this holds beyond the tested cases.
Authors: We appreciate the referee highlighting the centrality of the base-pose construction. The construction determines the unique SE(3) base pose by solving the rigid-body transformation that aligns the proximal tangent of the sampled continuum shape with the incoming leader path segment, using only the forward kinematics of the continuum robot and the known path geometry; this yields an exact closed-form expression without iteration. Because every sampled shape is drawn from the configuration space of a valid forward model, the resulting base pose preserves the FTL property by geometric construction whenever the sampled shape lies inside the manipulator workspace. The resolution-completeness guarantee therefore applies over the sampled set, and the 100% success rate in our 120-path experiments confirms that all generated samples admitted feasible base poses. We acknowledge, however, that the current manuscript does not contain an exhaustive formal proof or failure-mode analysis for completely arbitrary shapes under every conceivable general forward model. In the revised version we will add a dedicated paragraph in §3.2 together with an appendix that (i) states the precise invertibility conditions required for the closed-form solution, (ii) enumerates the singularity and workspace-limit cases under which the construction may fail, and (iii) reports additional stress-test simulations that deliberately probe those boundary conditions. revision: yes
Circularity Check
No significant circularity; derivation is algorithmic and self-contained
full rationale
The paper's core contribution is a sampling-based planner that decouples shape search from base-pose computation via an explicit closed-form geometric construction. This construction is presented as an independent algorithmic step that preserves the follow-the-leader property for general forward models, with separate proofs of resolution completeness and tip-tracking convergence. No parameter fitting, self-referential predictions, or load-bearing self-citations reduce any claimed result to its inputs by construction. The 120-path simulation results and hardware validation serve as external falsification rather than tautological confirmation. The derivation chain therefore remains non-circular.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Continuum robot forward models are general and computable for shape-to-pose mapping.
- domain assumption Workspace allows valid base poses for sampled shapes without collision or kinematic limits.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanJ_uniquely_calibrated_via_higher_derivative unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
decouple global shape search from base pose determination by computing the base pose through a closed-form geometric construction... Transformations 1–3 uniquely determine all six degrees of freedom of Tb while guaranteeing pD = wi by construction
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
resolution completeness for shape search and asymptotic convergence for tip tracking
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Ernar Amanov, Thien-Dang Nguyen, and Jessica Burgner-Kahrs. Tendon-driven continuum robots with extensible sections—a model-based evaluation of path- following motions.The International Journal of Robotics Research, 40(1):7–23, 2021
work page 2021
-
[2]
Robot motion planning: A distributed representation approach
Jerome Barraquand and Jean-Claude Latombe. Robot motion planning: A distributed representation approach. The International Journal of Robotics Research, 10(6): 628–649, 1991
work page 1991
-
[3]
Pierre Berthet-Rayne, Gauthier Gras, Konrad Leibrandt, Piyamate Wisanuvej, Andreas Schmitz, Carlo A Seneci, and Guang-Zhong Yang. The i2 snake robotic platform for endoscopic surgery.Annals of Biomedical Engineer- ing, 46(10):1663–1675, 2018
work page 2018
-
[4]
Nuclear snake- arm robots.Industrial Robot, 39(1):6–11, 2012
Rob Buckingham and Andrew Graham. Nuclear snake- arm robots.Industrial Robot, 39(1):6–11, 2012
work page 2012
-
[5]
Caleb Rucker, and Howie Choset
Jessica Burgner-Kahrs, D. Caleb Rucker, and Howie Choset. Continuum robots for medical applications: A survey.IEEE Transactions on Robotics, 31(6):1261– 1280, 2015
work page 2015
-
[6]
Jian Chen, Mingcong Chen, Qingxiang Zhao, Shuai Wang, Yihe Wang, Ying Xiao, Jian Hu, Danny Tat Ming Chan, Kam Tong Leo Yeung, David Yuen Chung Chan, et al. Design and visual servoing control of a hybrid dual- segment flexible neurosurgical robot for intraventricular biopsy. InIEEE International Conference on Robotics and Automation, pages 5906–5912. IEEE, 2024
work page 2024
-
[7]
Howie Choset and Wade Henning. A follow-the-leader approach to serpentine robot motion planning.Journal of Aerospace Engineering, 12(2):65–73, 1999
work page 1999
-
[8]
Margaret M. Coad, Laura H. Blumenschein, Sadie Cut- ler, Javier A. Reyna Zepeda, Nicholas D. Naclerio, Haitham El-Hussieny, Usman Mehmood, Jee-Hwan Ryu, Elliot W. Hawkes, and Allison M. Okamura. Vine robots. IEEE Robotics and Automation Magazine, 27(3):120– 132, 2020
work page 2020
-
[9]
Not your grandmother’s toolbox–the robotics toolbox reinvented for python
Peter Corke and Jesse Haviland. Not your grandmother’s toolbox–the robotics toolbox reinvented for python. In IEEE International Conference on Robotics and Automa- tion, pages 11357–11363. IEEE, 2021
work page 2021
-
[10]
Robotic needle steering: Design, modeling, planning, and image guidance
Noah J Cowan, Ken Goldberg, Gregory S Chirikjian, Gabor Fichtinger, Ron Alterovitz, Kyle B Reed, Vinutha Kallem, Wooram Park, Sarthak Misra, and Allison M Okamura. Robotic needle steering: Design, modeling, planning, and image guidance. InSurgical Robotics: Sys- tems Applications and Visions, pages 557–582. Springer, 2010
work page 2010
-
[11]
Continuum robots for medical interventions
Pierre E Dupont, Nabil Simaan, Howie Choset, and Caleb Rucker. Continuum robots for medical interventions. Proceedings of the IEEE, 110(7):847–870, 2022
work page 2022
-
[12]
GuoHua Gao, Pengyu Wang, and Hao Wang. Follow-the- leader motion strategy for multi-section continuum robots based on differential evolution algorithm.Industrial Robot, 48(4):589–601, 2021
work page 2021
-
[13]
Yuanqian Gao, Kiyoshi Takagi, Takahisa Kato, Naoyuki Shono, and Nobuhiko Hata. Continuum robot with follow-the-leader motion for endoscopic third ventricu- lostomy and tumor biopsy.IEEE Transactions on Biomedical Engineering, 67(2):379–390, 2020
work page 2020
-
[14]
Arnau Garriga-Casanovas and Ferdinando Rodriguez y Baena. Complete follow-the-leader kinematics using concentric tube robots.The International Journal of Robotics Research, 37(1):197–222, 2018
work page 2018
-
[15]
Gilbert, Joseph Neimat, and Robert J
Hunter B. Gilbert, Joseph Neimat, and Robert J. Webster. Concentric tube robots as steerable needles: Achieving follow-the-leader deployment.IEEE Transactions on Robotics, 31(2):246–258, 2015
work page 2015
-
[16]
Kudryavtsev, Patrick Rougeot, Pierre Renaud, Kanty Rabenorosoa, and Brahim Tamadazte
Cedric Girerd, Andrey V . Kudryavtsev, Patrick Rougeot, Pierre Renaud, Kanty Rabenorosoa, and Brahim Tamadazte. Slam-based follow-the-leader deployment of concentric tube robots.IEEE Robotics and Automation Letters, 5(2):548–555, 2020
work page 2020
-
[17]
Grassmann and Jessica Burgner-Kahrs
Reinhard M. Grassmann and Jessica Burgner-Kahrs. Clarke coordinates are generalized improved state parametrization for continuum robots.IEEE Robotics and Automation Letters, 10(10):10362–10369, 2025
work page 2025
-
[18]
Kinematics for multisection continuum robots.IEEE Transactions on Robotics, 22(1):43–55, 2006
Bryan A Jones and Ian D Walker. Kinematics for multisection continuum robots.IEEE Transactions on Robotics, 22(1):43–55, 2006
work page 2006
-
[19]
Byungjeon Kang, Risto Kojcev, and Edoardo Sinibaldi. The first interlaced continuum robot, devised to intrinsi- cally follow the leader.PloS One, 11(2):e0150278, 2016
work page 2016
- [20]
-
[21]
Liyang Mao, Yang Peng, Chenyao Tian, Xingjian Shen, Feihao Wang, Hao Zhang, Xianghe Meng, and Hui Xie. Magnetic steering continuum robot for transluminal procedures with programmable shape and functionalities. Nature Communications, 15, 2024
work page 2024
-
[22]
Abdelkhalick Mohammad, Matteo Russo, Yihua Fang, Xin Dong, Dragos Axinte, and James Kell. An efficient follow-the-leader strategy for continuum robot navigation and coiling.IEEE Robotics and Automation Letters, 6 (4):7493–7500, 2021
work page 2021
-
[23]
Considera- tions for follow-the-leader motion of extensible tendon- driven continuum robots
Maria Neumann and Jessica Burgner-Kahrs. Considera- tions for follow-the-leader motion of extensible tendon- driven continuum robots. InIEEE International Confer- ence on Robotics and Automation, pages 917–923, 2016
work page 2016
-
[24]
David Palmer, Salvador Cobos-Guzman, and Dragos Axinte. Real-time method for tip following navigation of continuum snake arm robots.Robotics and Autonomous Systems, 62(10):1478–1485, 2014
work page 2014
-
[25]
Rui Peng, Yu Wang, Minghao Lu, and Peng Lu. A dexterous and compliant aerial continuum manipulator for cluttered and constrained environments.Nature Communications, 16(1):889, 2025
work page 2025
-
[26]
Hung Pham and Quang-Cuong Pham. A new approach to time-optimal path parameterization based on reachability analysis.IEEE Transactions on Robotics, 34(3):645–659, 2018
work page 2018
-
[27]
Chen Qian, Tangyou Liu, and Liao Wu. Jammingsnake: A follow-the-leader continuum robot with variable stiff- ness based on fiber jamming.IEEE/ASME Transactions on Mechatronics, 30(4):3100–3107, 2025
work page 2025
-
[28]
Priyanka Rao, Quentin Peyron, Sven Lilge, and Jessica Burgner-Kahrs. How to model tendon-driven continuum robots and benchmark modelling performance.Frontiers in Robotics and AI, 7 - 2020, 2021. ISSN 2296-9144
work page 2020
-
[29]
Graham Robinson and J. Bruce C. Davies. Continuum robots-a state of the art. InIEEE iInternational Con- ference on Robotics and Automation, volume 4, pages 2849–2854, 1999
work page 1999
-
[30]
Animating rotation with quaternion curves
Ken Shoemake. Animating rotation with quaternion curves. InProceedings of the 12th annual conference on Computer graphics and interactive techniques, pages 245–254, 1985
work page 1985
-
[31]
Mujoco: A physics engine for model-based control
Emanuel Todorov, Tom Erez, and Yuval Tassa. Mujoco: A physics engine for model-based control. In2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, pages 5026–5033, 2012
work page 2012
-
[32]
Pauli Virtanen, Ralf Gommers, Travis E. Oliphant, Matt Haberland, Tyler Reddy, David Cournapeau, Evgeni Burovski, Pearu Peterson, Warren Weckesser, Jonathan Bright, St ´efan J. van der Walt, Matthew Brett, Joshua Wilson, K. Jarrod Millman, Nikolay Mayorov, Andrew R. J. Nelson, Eric Jones, Robert Kern, Eric Larson, C J Carey, ˙Ilhan Polat, Yu Feng, Eric W....
work page 2020
-
[33]
Mingfeng Wang, Xin Dong, Weiming Ba, Abdelkhalick Mohammad, Dragos A. Axinte, and Andy Norton. De- sign, modelling and validation of a novel extra slender continuum robot for in-situ inspection and repair in aeroengine.Robotics and Computer-Integrated Manu- facturing, 67, 2019
work page 2019
-
[34]
Follow-the-leader deployment of the interlaced continuum robot based on the unpowered lock mechanism
Peiyi Wang, Sheng Guo, Fuqun Zhao, Xiangyang Wang, and Majun Song. Follow-the-leader deployment of the interlaced continuum robot based on the unpowered lock mechanism. InIntelligent Robotics and Applications: 14th International Conference, page 448–459. Springer- Verlag, 2021. ISBN 978-3-030-89133-6
work page 2021
-
[35]
Paul Wilkening, Farshid Alambeigi, Ryan J. Murphy, Russell H. Taylor, and Mehran Armand. Development and experimental evaluation of concurrent control of a robotic arm and continuum manipulator for osteolytic lesion treatment.IEEE Robotics and Automation Letters, 2(3):1625–1631, 2017
work page 2017
-
[36]
Quan Xiao, Congjun Ma, Xuke Zhong, Yuqi Zhu, Xingx- ing You, and Songyi Dian. Design, modeling and motion planning of a mobile continuum robot for in-situ inspection and maintenance in gas-insulated switchgear. Robotics and Computer-Integrated Manufacturing, 99: 103205, 2026
work page 2026
-
[37]
Yunti Xu, Connor Watson, Jui-Te Lin, John T Hwang, and Tania K Morimoto. Shape control of concentric tube robots via approximate follow-the-leader motion.IEEE Robotics and Automation Letters, 9(8):7198–7205, 2024
work page 2024
-
[38]
Yu Yamauchi, Yuichi Ambe, Hikaru Nagano, Masashi Konyo, Yoshiaki Bando, Eisuke Ito, Solvi Arnold, Kim- itoshi Yamazaki, Katsutoshi Itoyama, Takayuki Okatani, et al. Development of a continuum robot enhanced with distributed sensors for search and rescue.Robomech Journal, 9(1):8, 2022. APPENDIX In the Appendix, we first present ablation studies validating ...
work page 2022
-
[39]
In this evaluation we use a 3-segment CR with PCC forward model and a library ofN lib = 20,000shapes
Effect of Clustering:We evaluate the effect of clustering on shape-following accuracy and computation time. In this evaluation we use a 3-segment CR with PCC forward model and a library ofN lib = 20,000shapes. To isolate the impact of shape search from interpolation effects, we measure shape deviation on thesparse plan only. This is necessary because loca...
-
[40]
4) reports overall deviation including interpolation, re- flecting practical performance
Effect of Library Size on Sparse Plan:The main paper (Fig. 4) reports overall deviation including interpolation, re- flecting practical performance. Here, we measure sparse plan deviation only to isolate the effect of library size on shape search quality. Fig. A2 shows shape deviation and computation time as a function ofN lib. Without interpolation noise...
-
[41]
All three variants share the same sparse plan
Effect of Radial Symmetry Pre-Alignment:We evaluate the effect of radial symmetry pre-alignment on overall shape deviation (including interpolation), comparing three configu- rations: no pre-alignment, discrete 3-fold symmetry (matching common tendon-driven CR designs), and continuous (full) symmetry. All three variants share the same sparse plan. All tes...
-
[42]
–Rotation matrix:Given axisvand angleθ, the Rodrigues formula givesR=I+ sinθ[v] × + (1− cosθ)[v] 2 ×
Note that whenθ→0orθ→π,∥v∥ →0, but the rotation itself becomes trivial (identity orπ-rotation about any perpendicular axis), so the resulting pose varies continuously. –Rotation matrix:Given axisvand angleθ, the Rodrigues formula givesR=I+ sinθ[v] × + (1− cosθ)[v] 2 ×. This is smooth (hence Lipschitz) in both θandvaway from degeneracies. Composing these, ...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.