Recognition: 2 theorem links
· Lean TheoremThe role of asymmetric time delay and its structure in 1D swarmalators
Pith reviewed 2026-05-13 04:42 UTC · model grok-4.3
The pith
Asymmetric time delay in 1D swarmalators expands the active π state as delay increases, unlike symmetric delay which favors unsteady states.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
In the one-dimensional swarmalator model with asymmetric time delay incorporated solely into the self-interaction terms of the spatial and phase equations, the phase diagram is reshaped such that increasing the delay systematically expands the active π state at the expense of other ordered states, in contrast to the symmetric delay model which more strongly promotes unsteady states; closed-form stability conditions for the async, static phase wave, static π, and active π states are obtained as functions of the coupling parameters and delay and validated by numerical simulations.
What carries the argument
Asymmetric time delay applied only to self-interaction terms in the spatial and phase dynamics, which breaks symmetry assumptions and determines the stability regions of collective states.
Load-bearing premise
The delay is assumed to enter only the self-interaction terms of the spatial and phase dynamics rather than all interaction terms.
What would settle it
Numerical simulation of the equations showing that the stability region of the active π state does not expand with increasing delay under the asymmetric structure.
Figures




read the original abstract
Swarmalators are a class of coupled oscillators that simultaneously synchronize in both space and phase, providing a minimal model for systems ranging from biological microswimmers to robotic swarms. Time delay is ubiquitous in such systems, arising from finite signal propagation speeds and sensory processing lags, yet its structural form, whether symmetric or asymmetric, has received little attention. Here, we study a one-dimensional swarmalator model with asymmetric time delay, in which the delay enters only the self-interaction terms of the spatial and phase dynamics, breaking the symmetry assumed in prior work. We identify various collective states such as async, static phase wave, static {\pi}, and active {\pi}, and derive analytical stability boundaries for each as a function of the coupling parameters and delay. Our analysis reveals that the asymmetric delay structure fundamentally reshapes the collective phase diagram: in particular, for the asymmetric delay models, increasing the delay systematically expands the active {\pi} state at the expense of other ordered states, in contrast to the symmetric delay model, which more strongly promotes the presence of unsteady states that are generally not well ordered. By providing closed-form stability conditions validated against numerical simulations, our work establishes that the internal structure of the delay, not merely its magnitude, is a decisive factor in determining the emergent collective behavior of swarmalator populations.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces a 1D swarmalator model in which asymmetric time delay is inserted exclusively into the self-interaction terms of the spatial and phase equations. It identifies four collective states (async, static phase wave, static π, active π), derives closed-form linear stability boundaries for each as explicit functions of the coupling strengths and delay magnitude, and validates the boundaries against direct numerical integration. The central claim is that the asymmetric structure systematically enlarges the stability region of the active π state with increasing delay, whereas the symmetric-delay counterpart favors unsteady, poorly ordered states.
Significance. If the derivations are correct, the work establishes that the internal structure of the delay—not merely its magnitude—is a decisive control parameter for swarmalator phase diagrams. The provision of closed-form stability conditions together with numerical confirmation supplies a concrete, falsifiable advance over purely numerical studies of delayed collective oscillators. This is particularly relevant for modeling biological microswimmers and robotic swarms where propagation or processing lags are inherently asymmetric.
major comments (2)
- [Model definition] Model definition section: the assumption that delay appears only in the self-interaction terms is load-bearing for the reported reshaping of the phase diagram. The manuscript should supply a brief physical or biological justification for this structural choice, as alternative placements of the delay (e.g., in cross-interaction terms) could alter or eliminate the expansion of the active π region.
- [Stability analysis] Stability analysis for the active π state: the closed-form boundary is presented as a function of delay, yet the linearization step implicitly assumes small perturbations around the π configuration. The manuscript should state the range of delay values for which the linear prediction remains quantitatively accurate before nonlinear effects or higher-order terms become dominant.
minor comments (3)
- [Numerical validation] The numerical validation section should report the number of independent realizations, the precise thresholds used to classify states from order-parameter time series, and any data-exclusion criteria.
- [Figures] Figure captions for the phase diagrams should explicitly list the fixed parameter values (e.g., coupling strengths) and the delay values shown in each panel.
- [Notation] Notation for the asymmetric delay parameter is introduced without a dedicated symbol table; a short table or inline definition at first use would improve readability.
Simulated Author's Rebuttal
We thank the referee for the constructive comments and the positive recommendation for minor revision. We address each major comment below.
read point-by-point responses
-
Referee: Model definition section: the assumption that delay appears only in the self-interaction terms is load-bearing for the reported reshaping of the phase diagram. The manuscript should supply a brief physical or biological justification for this structural choice, as alternative placements of the delay (e.g., in cross-interaction terms) could alter or eliminate the expansion of the active π region.
Authors: We agree that a justification strengthens the presentation. The asymmetric placement is motivated by systems in which each agent experiences an internal processing or actuation delay when updating its own state (e.g., finite sensory-motor latency in a microswimmer or onboard computation time in a robot), while direct neighbor interactions are taken as effectively instantaneous. This choice isolates the effect of intra-agent delay asymmetry. We will insert a short paragraph in the model-definition section providing this rationale and noting that other delay structures remain an open direction for future study. revision: yes
-
Referee: Stability analysis for the active π state: the closed-form boundary is presented as a function of delay, yet the linearization step implicitly assumes small perturbations around the π configuration. The manuscript should state the range of delay values for which the linear prediction remains quantitatively accurate before nonlinear effects or higher-order terms become dominant.
Authors: We appreciate the request for explicit bounds. Direct numerical integrations in the manuscript already show quantitative agreement between the analytic boundary and simulated transition points for normalized delays up to τ ≈ 1.0; beyond this value, nonlinear corrections begin to shift the observed onset. We will add a concise statement in the stability-analysis section specifying that the linear predictions remain accurate for τ ≲ 1.0 (in the units of the model) and will reference the existing simulation comparisons to support this range. revision: yes
Circularity Check
Derivation self-contained from explicit model equations
full rationale
The paper defines the 1D swarmalator model with asymmetric delay inserted only into self-interaction terms, then derives closed-form linear stability boundaries for the identified states (async, static phase wave, static π, active π) directly as functions of the coupling parameters and delay. These boundaries are validated against direct numerical integration under consistent parameters for both asymmetric and symmetric cases. No step reduces a prediction or stability condition to a fitted quantity by construction, nor relies on load-bearing self-citations or imported uniqueness theorems; the analysis proceeds from the stated equations without circular reduction.
Axiom & Free-Parameter Ledger
free parameters (2)
- coupling parameters
- delay magnitude
axioms (2)
- domain assumption The delay acts only on self-interaction terms in both spatial and phase equations
- domain assumption One-dimensional geometry and nearest-neighbor or all-to-all coupling form
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.lean (Jcost uniqueness, Aczél classification)washburn_uniqueness_aczel unclearThe 1D swarmalator model is governed by the pair of equations ˙xi = ... sin(xj(t−τ)−xi(t)) cos(θj(t)−θi(t)) ... (Eqs. 3-4); stability via characteristic equation (λ − J/4 e^{-λτ})(λ − K/4 e^{-λτ}) − JK/16 = 0 (Eq. 17).
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclearBifurcation diagrams and stability boundaries for async, phase-wave, and π states as functions of (J,K,τ).
Reference graph
Works this paper leans on
-
[1]
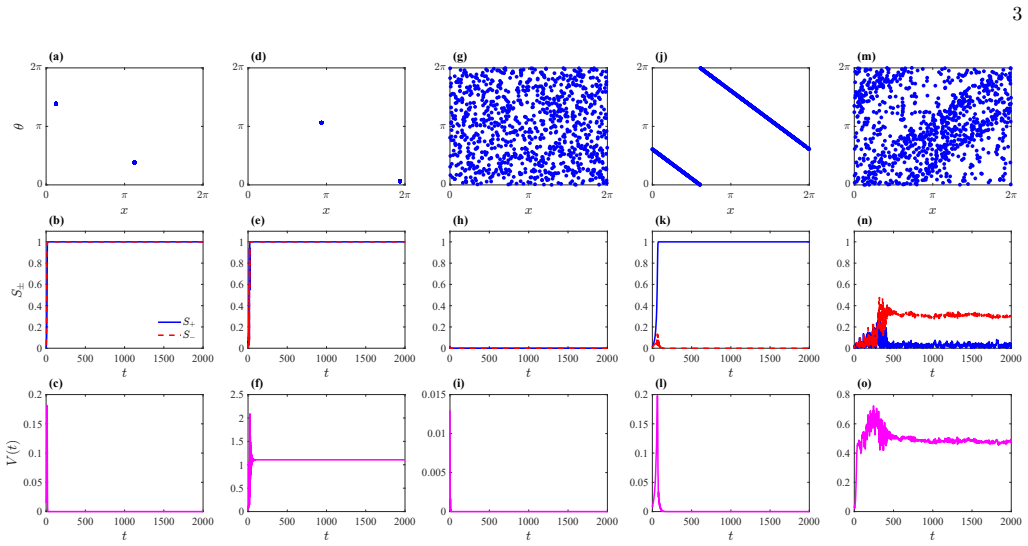
Stability of the async state We study the linear stability of the spatially and phase- uniform static state shown in panel (g) of Fig. 1; in the continuum limit of infinitely many swarmalator, the lat- ter can be described by the constant density f0(x, θ) = 1 4π2 ,(x, θ)∈S 1 ×S 1.(7) To parametrize this equilibrium, we introduce La- grangian labels (a, b)...
-
[2]
1) charac- terized by x∗ i = 2πi N , θ ∗ i = 2πi N , i= 1,
Stability of the phase wave Still considering the model (3)–(4), we now study the steady phase wave state (see panel (j) of Fig. 1) charac- terized by x∗ i = 2πi N , θ ∗ i = 2πi N , i= 1, . . . , N.(40) Proposition 1.The state(40)is a steady state of(3)– (4). Proof.Let ∆ ji = 2π(j−i) N . The summand in (3) equals sin ∆ji cos ∆ji = 1 2 sin(2∆ji). Settingm=...
-
[3]
The computation is identical for (4), so ˙xi = ˙θi = 0
vanishes. The computation is identical for (4), so ˙xi = ˙θi = 0. Linearization.We perturb the steady state by setting xi(t) = 2πi N +ξ i(t), θ i(t) = 2πi N +ϕ i(t),(42) with|ξ i|,|ϕ i| ≪1. Expanding to first order using sin(a+ ε)≈sina+εcosaand cos(a+ε)≈cosa−εsina, and noting that the zeroth-order terms cancel (as in the proof above), the linearized equat...
-
[4]
Setting µ(λ) := e−λτ 4 − 1 2 ,(58) the modal equations become λˆξ=J µ(λ) ˆξ+ 3J 4 ˆϕ, λ ˆϕ=Kµ(λ) ˆϕ+ 3K 4 ˆξ.(59) A nontrivial solution exists if and only if the determinant vanishes, giving the characteristic equation λ2 −(J+K)µ(λ)λ+J K µ(λ)2 − 9 16 = 0.(60) Caseτ= 0.Hereµ(0) =− 1 4, and (60) reduces to the polynomial λ2 + J+K 4 λ− J K 2 = 0.(61) For all...
-
[5]
Stability of the activeπstate We consider a two-cluster solution of the form (xi(t), θi(t)) = ( (xs +ω 1t, θs +ω 2t), i∈G 1, (xs +π+ω 1t, θs +π+ω 2t), i∈G 2 , (76) whereG 1 andG 2 form a partition of{1, . . . , N}(see panel (d) of Fig. 1). Substituting the latter into the equa- tions of motion and using that the cluster shift is either 0 orπ, one finds th...
-
[6]
Async state We consider the async state f0(x, θ) = 1 4π2 ,(x, θ)∈S 1 ×S 1,(A3) and introduce Lagrangian labels (a, b)∈S 1 ×S 1 such that x(a, b, t) =a+u(a, b, t), θ(a, b, t) =b+v(a, b, t),(A4) withu, vsmall perturbations. Linearizing aroundf 0 gives ∂tu(a, b, t) = J 4π2 Z 2π 0 Z 2π 0 h u(a′, b′, t) cos(a′ −a) cos(b ′ −b)−v(a ′, b′, t−τ) sin(a ′ −a) sin(b ...
-
[7]
, N,(A20) is again a steady state
Phase wave The phase wave state x(0) i =θ (0) i = 2πi N , i= 1, . . . , N,(A20) is again a steady state. We perturb it as xi(t) = 2πi N +ξ i(t), θi(t) = 2πi N +ϕ i(t),(A21) where|ξ i|,|ϕ i| ≪1. At linear order, writing ∆ ji = 2π(j− i)/N, we obtain ˙ξi(t) = J N NX j=1 h cos2∆ji (ξj(t)−ξ i(t)) −sin 2∆ji (ϕj(t−τ)−ϕ i(t)) i ,(A22) ˙ϕi(t) = K N NX j=1 h cos2∆j...
- [8]
-
[9]
T. H. Tan, A. Mietke, J. Li, Y. Chen, H. Higinbotham, P. J. Foster, S. Gokhale, J. Dunkel, and N. Fakhri, Nature 607, 287 (2022)
work page 2022
- [10]
-
[11]
J. Yan, M. Han, J. Zhang, C. Xu, E. Luijten, and S. Granick, Nature Materials15, 1095 (2016)
work page 2016
-
[12]
I. H. Riedel, K. Kruse, and J. Howard, Science309, 300 (2005)
work page 2005
- [13]
-
[14]
K. P. O’Keeffe, H. Hong, and S. H. Strogatz, Nature Communications8, 1504 (2017)
work page 2017
-
[15]
G. K. Sar, K. O’Keeffe, J. U. Liz´ arraga, M. A. de Aguiar, C. Bettstetter, and D. Ghosh, Physics Reports1167, 1 (2026)
work page 2026
-
[16]
K. O’Keeffe, S. Ceron, and K. Petersen, Physical Review E105, 014211 (2022)
work page 2022
-
[17]
S. Yoon, K. O’Keeffe, J. Mendes, and A. Goltsev, Phys- ical Review Letters129, 208002 (2022)
work page 2022
- [18]
-
[19]
B. Hao, M. Zhong, and K. O’Keeffe, Physical Review E 108, 064214 (2023)
work page 2023
-
[20]
G. K. Sar, D. Ghosh, and K. O’Keeffe, Physical Review E107, 024215 (2023)
work page 2023
-
[21]
G. K. Sar, D. Ghosh, and K. O’Keeffe, Physical Review E109, 044603 (2024)
work page 2024
-
[22]
G. K. Sar, K. O’Keeffe, and D. Ghosh, Chaos: An In- terdisciplinary Journal of Nonlinear Science33, 111103 (2023)
work page 2023
-
[23]
M. S. Anwar, D. Ghosh, and K. O’Keeffe, Physical Re- view E110, 054205 (2024)
work page 2024
-
[24]
M. S. Anwar, D. Ghosh, and K. O’Keeffe, Physical Re- view E111, 044207 (2025)
work page 2025
-
[25]
J. U. Liz´ arraga and M. A. de Aguiar, Physical Review E 108, 024212 (2023)
work page 2023
-
[26]
G. K. Sar, K. O’Keeffe, and D. Ghosh, Physical Review E111, 024206 (2025)
work page 2025
-
[27]
H. Hong, K. P. O’Keeffe, J. S. Lee, and H. Park, Physical Review Research5, 023105 (2023)
work page 2023
- [28]
-
[29]
M. S. Anwar, G. K. Sar, M. Perc, and D. Ghosh, Com- munications Physics7, 59 (2024)
work page 2024
-
[30]
R. Senthamizhan, R. Gopal, and V. Chandrasekar, Phys- 15 ical Review E113, 034216 (2026)
work page 2026
-
[31]
G. K. Sar, M. S. Anwar, M. Moriam´ e, D. Ghosh, and T. Carletti, Physical Review E111, 034212 (2025)
work page 2025
-
[32]
O’Keeffe, Chaos: An Interdisciplinary Journal of Non- linear Science35, 023150 (2025)
K. O’Keeffe, Chaos: An Interdisciplinary Journal of Non- linear Science35, 023150 (2025)
work page 2025
-
[33]
O’Keeffe, Chaos: An Interdisciplinary Journal of Non- linear Science35, 073139 (2025)
K. O’Keeffe, Chaos: An Interdisciplinary Journal of Non- linear Science35, 073139 (2025)
work page 2025
-
[34]
M. S. Yeung and S. H. Strogatz, Physical Review Letters 82, 648 (1999)
work page 1999
-
[35]
H. G. Schuster and P. Wagner, Progress of Theoretical Physics81, 939 (1989)
work page 1989
-
[36]
M. G. Earl and S. H. Strogatz, Physical Review E67, 036204 (2003)
work page 2003
-
[37]
N. Blum, A. Li, K. O’Keeffe, and O. Kogan, Physical Review E109, 014205 (2024)
work page 2024
-
[38]
C. Kumpeerakij, T. Chotibut, and O. Kogan, arXiv preprint arXiv:2508.07429 (2025)
-
[39]
K. O’Keeffe and J. Hindes, arXiv preprint arXiv:2602.08156 (2026)
- [40]
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.