0
Asymmetric delay enlarges active π state in 1D swarmalators
The role of asymmetric time delay and its structure in 1D swarmalators
Increasing delay in self-interaction models grows the ordered active π region, unlike symmetric delays that boost unsteady states.
 full image
full image
abstract click to expand
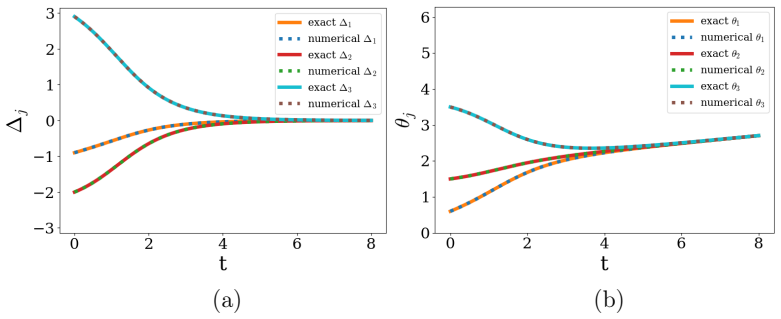
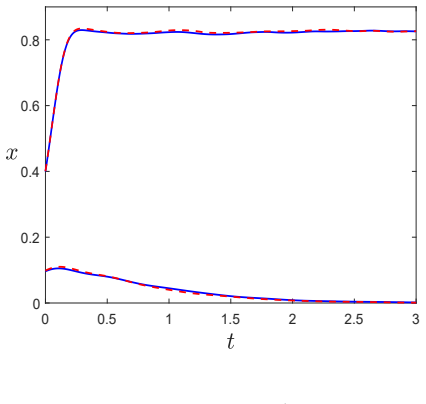
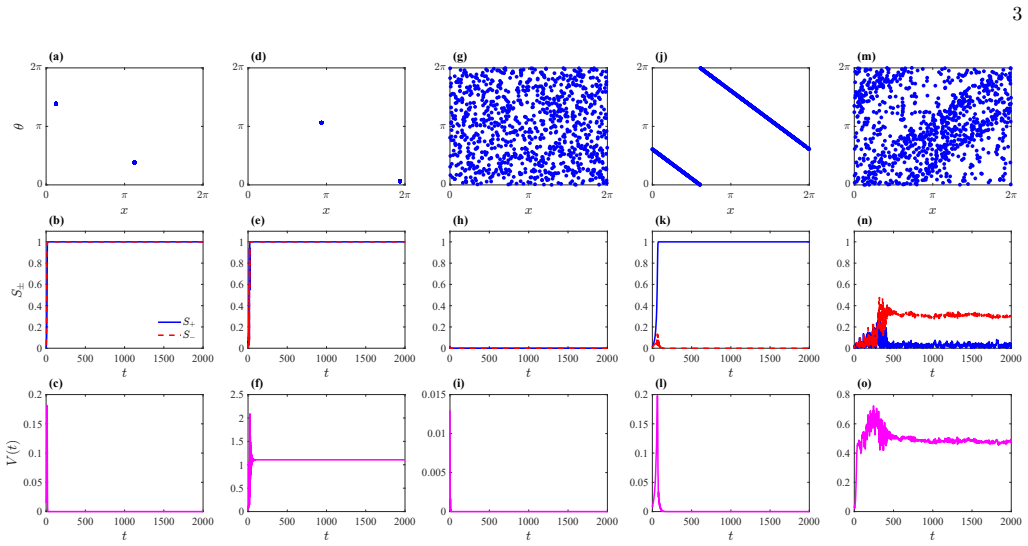
Swarmalators are a class of coupled oscillators that simultaneously synchronize in both space and phase, providing a minimal model for systems ranging from biological microswimmers to robotic swarms. Time delay is ubiquitous in such systems, arising from finite signal propagation speeds and sensory processing lags, yet its structural form, whether symmetric or asymmetric, has received little attention. Here, we study a one-dimensional swarmalator model with asymmetric time delay, in which the delay enters only the self-interaction terms of the spatial and phase dynamics, breaking the symmetry assumed in prior work. We identify various collective states such as async, static phase wave, static {\pi}, and active {\pi}, and derive analytical stability boundaries for each as a function of the coupling parameters and delay. Our analysis reveals that the asymmetric delay structure fundamentally reshapes the collective phase diagram: in particular, for the asymmetric delay models, increasing the delay systematically expands the active {\pi} state at the expense of other ordered states, in contrast to the symmetric delay model, which more strongly promotes the presence of unsteady states that are generally not well ordered. By providing closed-form stability conditions validated against numerical simulations, our work establishes that the internal structure of the delay, not merely its magnitude, is a decisive factor in determining the emergent collective behavior of swarmalator populations.