Recognition: no theorem link
Observer-Based Fixed-Time Nested Sliding-Mode Control for Tip-Position Regulation of a Single-Link Flexible Manipulator
Pith reviewed 2026-05-13 05:35 UTC · model grok-4.3
The pith
Fixed-time sliding mode observer combined with nested terminal controller regulates tip position of single-link flexible manipulator.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The authors establish that the observer-based nested non-singular terminal sliding mode control scheme guarantees fixed-time convergence of the tip-position error to zero for the single-link flexible manipulator, with the observer providing accurate estimates of unmeasured states in fixed time and the composite closed-loop system exhibiting robust finite-time stability properties.
What carries the argument
The nested non-singular terminal sliding mode controller combined with the fixed-time sliding mode observer, which together address the underactuated flexible dynamics and unmeasurable states.
If this is right
- The tip position converges to the target in a fixed time independent of initial conditions.
- Estimation errors for unmeasured states converge within the same fixed time.
- The closed-loop system maintains stability and performance under bounded disturbances.
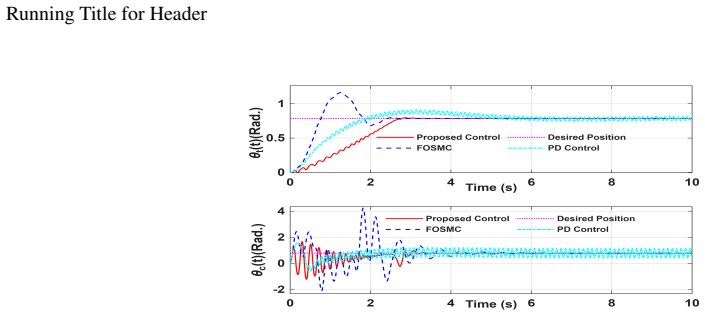
- Numerical and experimental results indicate improved accuracy and convergence speed over compared state-of-the-art schemes.
Where Pith is reading between the lines
- The nested structure could extend to multi-link flexible manipulators by adding further sliding surfaces for additional degrees of freedom.
- The fixed-time property supports predictable cycle times in automated manufacturing sequences involving flexible arms.
- Testing under varying payload masses would reveal how sensitive the fixed-time bound remains to parameter changes.
Load-bearing premise
The manipulator dynamics are known accurately enough to design both the observer and controller, and real disturbances remain within the bounds assumed for fixed-time convergence.
What would settle it
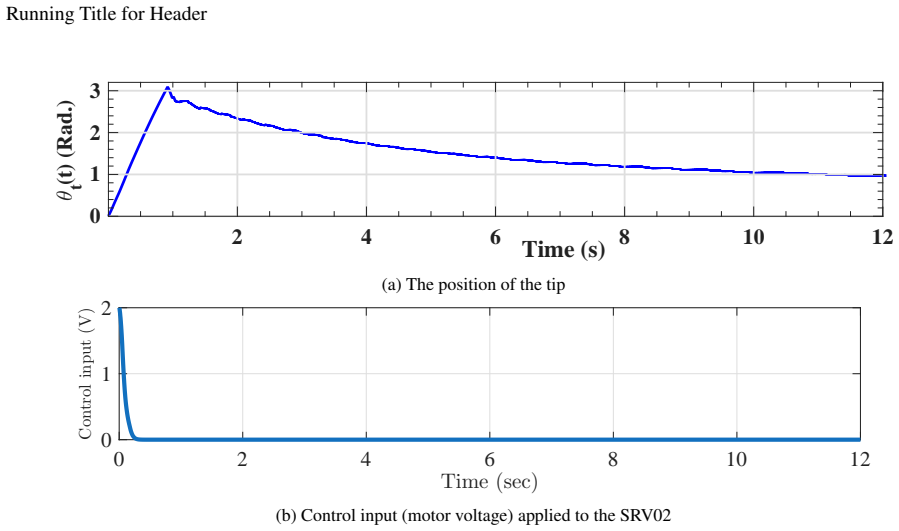
A hardware experiment on the real manipulator where the tip-position error fails to reach zero within the designed fixed time when disturbances exceed the assumed bounds or when the model parameters deviate substantially from those used in design.
Figures






read the original abstract
This paper presents a novel position control strategy for a single-link flexible manipulator, tailored for applications where precise position must be achieved within strict time constraints. To accomplish this objective, firstly, a nested non-singular terminal sliding mode controller is designed for the system, enabling precise and robust control. Furthermore, a fixed-time sliding mode observer is designed to estimate unmeasured system states accurately in a fixed time, thereby enabling closed-loop control implementation. A stability analysis is presented to guarantee the robustness and efficacy of the proposed composite control algorithm. The effectiveness of the proposed fixed-time controller is demonstrated through numerical simulation on accuracy, stability, and convergence speed. The proposed controller's performance is also compared with that of other state-of-the-art control schemes. The proposed controller is further validated through experiments conducted on a real hardware setup.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a composite control scheme for tip-position regulation of a single-link flexible manipulator consisting of a fixed-time sliding-mode observer for estimating unmeasured states and a nested non-singular terminal sliding-mode controller. It presents a Lyapunov-based stability analysis claiming fixed-time convergence and robustness to disturbances, supported by numerical simulations (including comparisons to other state-of-the-art schemes) and hardware experiments on a physical setup.
Significance. If the stability analysis rigorously establishes fixed-time convergence without circular reliance on exact parameter knowledge or overly conservative disturbance bounds, the work would add a practical contribution to time-constrained robust control of flexible systems. The inclusion of both simulation comparisons and hardware validation strengthens the practical relevance, though the overall significance is limited by the standard nature of the nested NTSMC + fixed-time observer combination in the literature.
major comments (2)
- [Stability Analysis] The stability analysis (typically in the section following the controller/observer design) relies on a priori bounds on lumped disturbances (including unmodeled flexible dynamics, friction, and external torques) and exact knowledge of inertia, stiffness, and damping parameters for both observer and controller gain selection. For a flexible manipulator, which is governed by a distributed-parameter PDE, it is unclear whether the fixed-time property is proven for the infinite-dimensional model or only a finite-mode approximation; if the latter, higher-order modes could violate the assumed bounds and reduce the result to ultimate boundedness. Please specify the exact model used in the Lyapunov analysis and the explicit disturbance bound assumptions (e.g., |d(t)| ≤ D).
- [Observer Design] The fixed-time observer design assumes the manipulator dynamics are known sufficiently well to compute the observer gains and ensure the fixed-time estimation error convergence. This assumption is load-bearing for the composite closed-loop claim; if parameter uncertainties exceed the modeled bounds, the separation principle used for the observer-based controller may not hold. Clarify how modeling errors in the single-link flexible dynamics are accounted for in the observer error dynamics.
minor comments (2)
- The abstract would benefit from including at least one quantitative performance metric (e.g., settling time or steady-state error) from the simulations or experiments to substantiate the claims of accuracy and convergence speed.
- Ensure all figures (simulation trajectories and hardware results) include clear legends, axis labels with units, and direct visual comparison to the competing controllers mentioned in the text.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed comments on our manuscript. These have prompted us to strengthen the presentation of the model assumptions and robustness properties. In the revised version we will explicitly state that the analysis applies to the finite-dimensional truncation, provide the disturbance bound used, and clarify the treatment of modeling errors within the observer error dynamics.
read point-by-point responses
-
Referee: [Stability Analysis] The stability analysis (typically in the section following the controller/observer design) relies on a priori bounds on lumped disturbances (including unmodeled flexible dynamics, friction, and external torques) and exact knowledge of inertia, stiffness, and damping parameters for both observer and controller gain selection. For a flexible manipulator, which is governed by a distributed-parameter PDE, it is unclear whether the fixed-time property is proven for the infinite-dimensional model or only a finite-mode approximation; if the latter, higher-order modes could violate the assumed bounds and reduce the result to ultimate boundedness. Please specify the exact model used in the Lyapunov analysis and the explicit disturbance bound assumptions (e.g., |d(t)| ≤ D).
Authors: We appreciate this observation. The Lyapunov analysis is performed on the finite-dimensional model obtained by applying the assumed-modes method to the Euler-Bernoulli PDE and retaining a finite number of modes; the resulting state-space representation is used throughout the controller and observer design. We will add an explicit statement of this truncation (including the number of modes employed in the numerical and experimental sections) together with the precise disturbance assumption |d(t)| ≤ D, where D is a known positive constant that bounds the lumped effect of unmodeled higher modes, friction, and external torques. The fixed-time convergence is therefore guaranteed only for the truncated model; we will also insert a short discussion acknowledging that the full infinite-dimensional system may exhibit only ultimate boundedness when higher modes are excited. revision: yes
-
Referee: [Observer Design] The fixed-time observer design assumes the manipulator dynamics are known sufficiently well to compute the observer gains and ensure the fixed-time estimation error convergence. This assumption is load-bearing for the composite closed-loop claim; if parameter uncertainties exceed the modeled bounds, the separation principle used for the observer-based controller may not hold. Clarify how modeling errors in the single-link flexible dynamics are accounted for in the observer error dynamics.
Authors: Thank you for raising this point. Modeling errors and parameter uncertainties are absorbed into the lumped disturbance that appears in the observer error dynamics; the fixed-time sliding-mode observer is constructed to be robust to any bounded disturbance satisfying the same |d(t)| ≤ D assumption used in the stability proof. Consequently, the estimation error still converges in fixed time provided the bound holds. We will augment the observer-error section with an explicit decomposition showing how the mismatch between nominal and actual inertia, stiffness, and damping enters the disturbance term, and we will note that the composite closed-loop analysis relies on the finite-time vanishing of the observer error rather than an exact separation principle. revision: partial
- Rigorous fixed-time stability proof for the original infinite-dimensional PDE model without finite-mode truncation.
Circularity Check
No significant circularity detected in derivation chain
full rationale
The provided abstract and context describe a composite fixed-time observer and nested sliding-mode controller with a stability analysis via Lyapunov methods to guarantee fixed-time convergence. No equations, parameter fits, or self-citations are exhibited that reduce any claimed prediction or uniqueness result to a definition or input by construction. The central stability claim is presented as an independent analysis on the system model, with no evidence of self-definitional loops, fitted inputs renamed as predictions, or load-bearing self-citations. This is the expected outcome for a control-theory paper whose proof steps remain external to the target result.
Axiom & Free-Parameter Ledger
axioms (1)
- standard math Lyapunov stability theory guarantees finite-time or fixed-time convergence when a suitable Lyapunov function decreases at a prescribed rate.
Reference graph
Works this paper leans on
-
[1]
Research on novel wire driving robot ma- nipulator for local industrial production line
Jianjun Y uan, Weijun Zhang, Jun Tao, Zhicheng Wan, and Zhixia Tang. Research on novel wire driving robot ma- nipulator for local industrial production line. In 2007 International Conference on Mechatronics and Automation, pages 3925–3930. IEEE, 2007
work page 2007
-
[2]
Robotics in building construction
Abraham Warszawski and Dwight A Sangrey. Robotics in building construction. Journal of construction engi- neering and management, 111(3):260–280, 1985
work page 1985
-
[3]
Advances in flexible robotic manipulator systemspart i: Overview and dynamics modeling methods
Bai Li, Xinyuan Li, Hejia Gao, and Fei-Y ue Wang. Advances in flexible robotic manipulator systemspart i: Overview and dynamics modeling methods. IEEE/ASME Transactions on Mechatronics, 2024
work page 2024
-
[4]
Mathematical modeling and trajectory planning of mobile manipulators with flexible links and joints
Moharam Habibnejad Korayem, HN Rahimi, and A Nikoobin. Mathematical modeling and trajectory planning of mobile manipulators with flexible links and joints. Applied Mathematical Modelling, 36(7):3229–3244, 2012
work page 2012
-
[5]
Rest-to-rest motion of a one-link flexible arm
Alessandro De Luca and G Di Giovanni. Rest-to-rest motion of a one-link flexible arm. In 2001 IEEE/ASME International Conference on Advanced Intelligent Mechatronics. Proceedings (Cat. No. 01TH8556) , volume 2, pages 923–928. IEEE, 2001
work page 2001
-
[6]
On the dynamic modeling of flexible manipulators
Donatus Oguamanam, Sr ¯dan Bošnjak, and Nenad Zrni ´c. On the dynamic modeling of flexible manipulators. FME Transactions, 34(4):231–237, 2006
work page 2006
-
[7]
Cable stiffened flexible link manipulator
Rahul Dixit and R Prasanth Kumar. Cable stiffened flexible link manipulator. In 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems , pages 871–876. IEEE, 2014
work page 2014
-
[8]
Bai Li, Xinyuan Li, Hejia Gao, and Fei-Y ue Wang. Advances in flexible robotic manipulator systemspart ii: Planning, control, applications, and perspectives. IEEE/ASME Transactions on Mechatronics, 2024
work page 2024
-
[9]
Boundary control for a flexible manipulator based on infinite dimen- sional disturbance observer
Tingting Jiang, Jinkun Liu, and Wei He. Boundary control for a flexible manipulator based on infinite dimen- sional disturbance observer. Journal of sound and Vibration, 348:1–14, 2015
work page 2015
-
[10]
Sliding mode control of vibration in a single-link flexible arm with parameter variations
S-B Choi, C-C Cheong, and H-C Shin. Sliding mode control of vibration in a single-link flexible arm with parameter variations. Journal of Sound and Vibration, 179(5):737–748, 1995
work page 1995
-
[11]
Non-singular terminal sliding mode control of rigid manipulators
Y ong Feng, Xinghuo Y u, and Zhihong Man. Non-singular terminal sliding mode control of rigid manipulators. Automatica, 38(12):2159–2167, 2002
work page 2002
-
[12]
Nonlinear feedback design for fixed-time stabilization of linear control systems
Andrey Polyakov. Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE trans- actions on Automatic Control, 57(8):2106–2110, 2011
work page 2011
-
[13]
Adaptive fixed-time speed control and position observation for sensorless pmsm control
Ruiqi Xu, Zhuang Kang, Zhuang Liu, Shun Cai, Y abin Gao, and Jianxing Liu. Adaptive fixed-time speed control and position observation for sensorless pmsm control. IEEE Transactions on Transportation Electrification , 2025
work page 2025
-
[14]
NG Chalhoub, GA Kfoury, and BA Bazzi. Design of robust controllers and a nonlinear observer for the control of a single-link flexible robotic manipulator. Journal of Sound and Vibration, 291(1-2):437–461, 2006
work page 2006
-
[15]
Farzaneh Hamzeh Nejad, Ali Fayazi, Hossein Ghayoumi Zadeh, Hassan Fatehi Marj, and S Hassan Hossein- Nia. Precise tip-positioning control of a single-link flexible arm using a fractional-order sliding mode controller. Journal of Vibration and Control, 26(19-20):1683–1696, 2020
work page 2020
-
[16]
Atul Sharma and S Janardhanan. Position control of single-link flexible manipulator: A functional observer based sliding mode approach. In 2024 European Control Conference (ECC), pages 3684–3689. IEEE, 2024
work page 2024
-
[17]
Omar Mechali, Limei Xu, Xiaomei Xie, and Jamshed Iqbal. Fixed-time nonlinear homogeneous sliding mode approach for robust tracking control of multirotor aircraft: Experimental validation. Journal of the Franklin Institute, 359(5):1971–2029, 2022
work page 1971
-
[18]
Pooyan Alinaghi Hosseinabadi, Ali Soltani Sharif Abadi, Howard Schwartz, Hemanshu Pota, and Saad Mekhilef. Fixed-time sliding mode observer-based controller for a class of uncertain nonlinear double integrator systems. Asian Journal of Control, 25(5):3456–3473, 2023
work page 2023
-
[19]
Erfan Rezaei, Hossein Bolandi, and Mohammad Fathi. Designing a fixed-time observer-based adaptive non- singular sliding mode controller for flexible spacecraft. ISA transactions, 148:32–44, 2024. 15 Running Title for Header
work page 2024
-
[20]
Linear-quadratic optimal boundary control of a one-link flexible arm
Andrea Cristofaro, Alessandro De Luca, and Leonardo Lanari. Linear-quadratic optimal boundary control of a one-link flexible arm. IEEE Control Systems Letters, 5(3):833–838, 2020
work page 2020
-
[21]
Xiaocong Zhu, Jian Cao, Cianyi Y annick, Linyuan Wang, Xinda Shen, and Peng Liu. High-precision tip track- ing of a flexible link manipulator using two-time scale adaptive robust control. IEEE/ASME Transactions on Mechatronics, 2023
work page 2023
-
[22]
Adaptive intelligent vision-based control of a flexible- link manipulator
Umesh Kumar Sahu, Dipti Patra, and Bidyadhar Subudhi. Adaptive intelligent vision-based control of a flexible- link manipulator. Electrical Engineering, 105(5):3263–3281, 2023
work page 2023
-
[23]
Joshi Kumar Viswanadhapalli, Vinodh Kumar Elumalai, S Shivram, Sweta Shah, and Dhruv Mahajan. Deep reinforcement learning with reward shaping for tracking control and vibration suppression of flexible link manip- ulator. Applied Soft Computing, 152:110756, 2024
work page 2024
-
[24]
Reinforcement learning control of a flexible two-link manipulator: An experimental investigation
Wei He, Hejia Gao, Chen Zhou, Chenguang Y ang, and Zhijun Li. Reinforcement learning control of a flexible two-link manipulator: An experimental investigation. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 51(12):7326–7336, 2020
work page 2020
-
[25]
Flexible single-link manipulators control based on a full-order transfer function model
Reza Mohsenipour and Guangjun Liu. Flexible single-link manipulators control based on a full-order transfer function model. IEEE Transactions on Automatic Control, 2024
work page 2024
-
[26]
Boundary disturbance observer-based control of a vibrating single- link flexible manipulator
Zhijia Zhao, Xiuyu He, and Choon Ki Ahn. Boundary disturbance observer-based control of a vibrating single- link flexible manipulator. IEEE Transactions on Systems, Man, and Cybernetics: Systems , 51(4):2382–2390, 2019
work page 2019
-
[27]
Prasenjit Sarkhel, Mithilesh K Dikshit, Vimal Kumar Pathak, Kuldeep K Saxena, C Prakash, and Dharam Buddhi. Robust deflection control and analysis of a fishing rod-type flexible robotic manipulator for collaborative robotics. Robotics and Autonomous Systems , 159:104293, 2023
work page 2023
-
[28]
Comparative study of post-impact motion control of a flexible arm space robot
Sharmila Kayastha, Jayantha Katupitiya, Garth Pearce, and Asha Rao. Comparative study of post-impact motion control of a flexible arm space robot. European Journal of Control, 69:100738, 2023
work page 2023
-
[29]
Atul Sharma and S Janardhanan. Position control of single link flexible manipulator: a functional observer-based output feedback sliding mode approach. International Journal of Systems Science , pages 1–12, 2024
work page 2024
-
[30]
Linear system theory and design
Chi Tsong Chen. Linear system theory and design . Saunders college publishing, 1984
work page 1984
-
[31]
Terminal sliding mode control–an overview
Xinghuo Y u, Y ong Feng, and Zhihong Man. Terminal sliding mode control–an overview. IEEE Open Journal of the Industrial Electronics Society , 2:36–52, 2020
work page 2020
-
[32]
Pd control with on-line gravity compensation for robots with flexible links
Loredana Zollo, Bruno Siciliano, Alessandro De Luca, and Eugenio Guglielmelli. Pd control with on-line gravity compensation for robots with flexible links. In 2007 European Control Conference (ECC) , pages 4365–4370. IEEE, 2007
work page 2007
-
[33]
Workbook on flexible link experiment for matlab/simulink users
J Apkarian, P Karam, and M Levis. Workbook on flexible link experiment for matlab/simulink users. Quanser, 2011. 16
work page 2011
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.