Recognition: 2 theorem links
· Lean TheoremStochastic Minimum-Cost Reach-Avoid Reinforcement Learning
Pith reviewed 2026-05-13 07:23 UTC · model grok-4.3
The pith
Reach-avoid probability certificates turn stochastic safety constraints into a surrogate objective that reinforcement learners can optimize for minimum cost.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
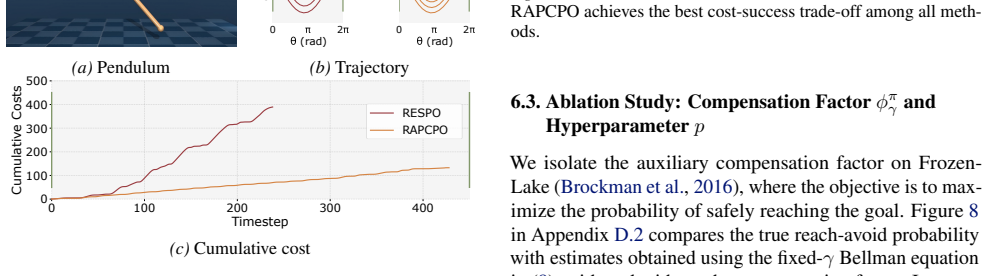
The authors introduce reach-avoid probability certificates (RAPCs) that identify states from which the stochastic reach-avoid specification is satisfiable at the required probability level. They then construct a contraction-based Bellman formulation that uses the certificates as a surrogate for the constraint, integrate this formulation into reinforcement learning so that expected cost is minimized subject to the probabilistic requirement, and prove that the resulting algorithms converge almost surely to locally optimal policies with respect to the surrogate objective. MuJoCo experiments show that the learned policies incur lower costs and achieve higher reach-avoid satisfaction rates than a
What carries the argument
Reach-avoid probability certificates (RAPCs) together with a contraction-based Bellman operator that acts as a surrogate for integrating the probabilistic reach-avoid requirement into cost optimization.
If this is right
- Policies obtained from the surrogate objective achieve strictly lower expected cost than baselines while maintaining the required reach-avoid probability.
- The contraction property of the Bellman operator guarantees almost-sure convergence of both value iteration and policy iteration variants to a local optimum of the combined objective.
- The same certificate construction extends directly to continuous control tasks, as demonstrated by improved performance on standard MuJoCo benchmarks.
Where Pith is reading between the lines
- The certificate approach could be lifted to other probabilistic temporal specifications by replacing the reach-avoid sets with appropriate winning regions.
- In deployed systems the learned surrogate may reduce reliance on runtime shielding because the probability guarantee is already baked into the value function.
- Accuracy of the certificates under function approximation remains the main practical bottleneck; tighter bounds on approximation error would strengthen the convergence claim.
Load-bearing premise
Reach-avoid probability certificates can be computed or approximated accurately enough during learning to serve as a reliable surrogate for the true probabilistic constraint in stochastic environments.
What would settle it
Repeated evaluation of the learned policy in held-out stochastic environments where the empirical frequency of satisfying the reach-avoid specification falls below the prescribed probability p, or where the achieved cost exceeds that of a simple baseline that ignores the constraint.
Figures







read the original abstract
We study stochastic minimum-cost reach-avoid reinforcement learning, where an agent must satisfy a reach-avoid specification with probability at least $p$ while minimizing expected cumulative costs in stochastic environments. Existing safe and constrained reinforcement learning methods typically fail to jointly enforce probabilistic reach-avoid constraints and optimize cost in the learning setting in stochastic environments. To address this challenge, we introduce reach-avoid probability certificates (RAPCs), which identify states from which stochastic reach-avoid constraints are satisfiable. Building on RAPCs, we develop a contraction-based Bellman formulation that serves as a principled surrogate for integrating reach-avoid considerations into reinforcement learning, enabling cost optimization under probabilistic constraints. We establish almost sure convergence of the proposed algorithms to locally optimal policies with respect to the resulting objective. Experiments in the MuJoCo simulator demonstrate improved cost performance and consistently higher reach-avoid satisfaction rates.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper studies stochastic minimum-cost reach-avoid reinforcement learning, where an agent must satisfy a reach-avoid specification with probability at least p while minimizing expected costs. It introduces reach-avoid probability certificates (RAPCs) to identify states satisfying the probabilistic constraints, develops a contraction-based Bellman formulation as a surrogate objective integrating these constraints, establishes almost sure convergence of the proposed algorithms to locally optimal policies with respect to the surrogate, and reports improved cost performance with higher reach-avoid satisfaction rates in MuJoCo experiments.
Significance. If the surrogate objective reliably enforces the original probabilistic constraints and the convergence result holds under realistic approximations, the work would advance constrained RL by offering a principled contraction-based approach to joint cost optimization and probabilistic safety in stochastic settings, addressing limitations of existing methods. The MuJoCo results indicate potential practical utility, but significance depends on closing the gap between surrogate optimality and true constraint satisfaction.
major comments (2)
- [Abstract and theoretical development] Abstract and theoretical development: The central claim is almost sure convergence to locally optimal policies 'with respect to the resulting objective' obtained from the contraction-based Bellman operator on RAPCs. However, RAPCs cannot be computed exactly in continuous stochastic environments and require approximation (via sampling or function approximation). No quantitative bound is derived on how approximation error in RAPC values propagates through the Bellman operator to the true reach-avoid probability of the converged policy. Without such an error-propagation analysis, convergence to a local optimum of the surrogate does not establish satisfaction of the original p-threshold constraint.
- [Approach and assumptions] The weakest assumption in the approach is that RAPCs can be approximated accurately enough during learning to serve as a reliable surrogate. The manuscript provides no analysis or experiments quantifying the sensitivity of the learned policy's true reach-avoid probability to RAPC approximation error, which is load-bearing for translating the theoretical guarantee into a practical safety guarantee.
minor comments (1)
- [Abstract] The abstract introduces RAPCs without a one-sentence intuition or definition; adding this would improve accessibility for readers unfamiliar with reach-avoid specifications.
Simulated Author's Rebuttal
We thank the referee for the thoughtful and detailed comments, which help clarify the scope of our contributions. We address each major point below, emphasizing that our theoretical results concern convergence to the surrogate objective while experiments provide empirical evidence of practical performance.
read point-by-point responses
-
Referee: [Abstract and theoretical development] Abstract and theoretical development: The central claim is almost sure convergence to locally optimal policies 'with respect to the resulting objective' obtained from the contraction-based Bellman operator on RAPCs. However, RAPCs cannot be computed exactly in continuous stochastic environments and require approximation (via sampling or function approximation). No quantitative bound is derived on how approximation error in RAPC values propagates through the Bellman operator to the true reach-avoid probability of the converged policy. Without such an error-propagation analysis, convergence to a local optimum of the surrogate does not establish satisfaction of the original p-threshold constraint.
Authors: We agree that a quantitative error-propagation bound would provide a stronger link between surrogate optimality and the original probabilistic constraint. Our manuscript establishes almost-sure convergence specifically to locally optimal policies with respect to the surrogate objective induced by the contraction Bellman operator on RAPCs; this is the precise statement of the theoretical result. The surrogate is constructed so that, under exact RAPCs, its optima satisfy the reach-avoid specification. We do not derive an explicit propagation bound because obtaining tight, non-vacuous bounds in general continuous stochastic MDPs remains an open technical challenge. The contraction property nevertheless guarantees stability of the iterates. Our MuJoCo experiments, conducted under realistic function approximation, show that the learned policies consistently achieve higher reach-avoid satisfaction rates than baselines while improving cost. In revision we will add a dedicated paragraph in the discussion section that explicitly states the scope of the convergence guarantee and identifies error-bound analysis as an important direction for future work. revision: partial
-
Referee: [Approach and assumptions] The weakest assumption in the approach is that RAPCs can be approximated accurately enough during learning to serve as a reliable surrogate. The manuscript provides no analysis or experiments quantifying the sensitivity of the learned policy's true reach-avoid probability to RAPC approximation error, which is load-bearing for translating the theoretical guarantee into a practical safety guarantee.
Authors: We acknowledge that the reliability of RAPC approximations is a central modeling assumption. The current manuscript does not contain a dedicated sensitivity study that systematically varies RAPC estimation error and measures the resulting change in true reach-avoid probability. The design of the contraction-based surrogate, however, embeds the probabilistic certificates directly into the objective, and the empirical evaluation on stochastic MuJoCo tasks demonstrates that the resulting policies maintain elevated constraint satisfaction rates under the function-approximation regime used in practice. To strengthen the practical interpretation, we will add a new subsection in the experiments that reports results under controlled variations of RAPC sampling budget (hence approximation quality) and tabulates the observed true reach-avoid probabilities. revision: yes
Circularity Check
No circularity; convergence derived from standard contraction on explicitly constructed surrogate
full rationale
The paper defines RAPCs as states satisfying the probabilistic reach-avoid condition, then constructs a contraction-based Bellman operator as an explicit surrogate objective. Almost-sure convergence is claimed for policies optimal w.r.t. this surrogate via standard arguments. No equation reduces the claimed result to a fitted parameter renamed as prediction, no self-citation is load-bearing for the core derivation, and the surrogate is not defined circularly in terms of its own outputs. The approximation issue for RAPCs affects correctness of constraint satisfaction but does not create a definitional loop in the derivation chain itself.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The environment is a stochastic Markov decision process whose transition probabilities allow well-defined reach-avoid probabilities.
invented entities (1)
-
Reach-Avoid Probability Certificates (RAPCs)
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Define the operator B^π[V](x) := max{ h(x), min{ g(x), γ E[V(x')] } } ... V(x)=B^π[V](x) admits a unique bounded solution V^π_{g,h} and B^π is a γ-contraction
-
IndisputableMonolith/Foundation/BranchSelection.leanbranch_selection unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
surrogate optimization problem (RAPCRL): min_π E[ V^π_c(x) 1_{Xp} + V^π_{g,h}(x)/ϕ^π_γ(x) 1_{X∖Xp} ]
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Brockman, G., Cheung, V ., Pettersson, L., Schneider, J., Schulman, J., Tang, J., and Zaremba, W
Ac- cessed: 2026-05-12. Brockman, G., Cheung, V ., Pettersson, L., Schneider, J., Schulman, J., Tang, J., and Zaremba, W. Ope- nai gym,
work page 2026
-
[2]
URL https://arxiv.org/abs/ 1606.01540. Brunke, L., Greeff, M., Hall, A. W., Yuan, Z., Zhou, S., Panerati, J., and Schoellig, A. P. Safe learning in robotics: From learning-based control to safe reinforce- ment learning.Annual Review of Control, Robotics, and Autonomous Systems, 5(1):411–444,
work page internal anchor Pith review Pith/arXiv arXiv
-
[3]
Cao, Z., Wang, P., Ong, L., Žikeli´c, Ð., Wagner, D., and Xue, B. Comparative analysis of barrier-like function methods for reach-avoid verification in stochastic discrete-time systems.arXiv preprint arXiv:2512.05348,
-
[4]
L., Delage, E., Derman, E., Ghavamzadeh, M., and Petrik, M
Hau, J. L., Delage, E., Derman, E., Ghavamzadeh, M., and Petrik, M. Q-learning for quantile mdps: A decompo- sition, performance, and convergence analysis.arXiv preprint arXiv:2410.24128,
-
[5]
Goal-conditioned re- inforcement learning: Problems and solutions.arXiv preprint arXiv:2201.08299,
Liu, M., Zhu, M., and Zhang, W. Goal-conditioned re- inforcement learning: Problems and solutions.arXiv preprint arXiv:2201.08299,
-
[6]
10 Stochastic Minimum-Cost Reach-Avoid Reinforcement Learning Marvi, Z. and Kiumarsi, B. Safe reinforcement learning: A control barrier function optimization approach.Interna- tional Journal of Robust and Nonlinear Control, 31(6): 1923–1940,
work page 1923
-
[7]
Multi-Goal Reinforcement Learning: Challenging Robotics Environments and Request for Research
Plappert, M., Andrychowicz, M., Ray, A., McGrew, B., Baker, B., Powell, G., Schneider, J., Tobin, J., Chociej, M., Welinder, P., et al. Multi-goal reinforcement learn- ing: Challenging robotics environments and request for research.arXiv preprint arXiv:1802.09464,
-
[8]
Benchmarking safe exploration in deep reinforcement learning,
Ray, A., Achiam, J., and Amodei, D. Benchmarking safe ex- ploration in deep reinforcement learning.arXiv preprint arXiv:1910.01708, 7(1):2,
-
[9]
Proximal Policy Optimization Algorithms
Schulman, J., Wolski, F., Dhariwal, P., Radford, A., and Klimov, O. Proximal policy optimization algorithms. arXiv preprint arXiv:1707.06347,
work page internal anchor Pith review Pith/arXiv arXiv
-
[10]
URLhttps://arxiv.org/abs/2305.14154. So, O., Ge, C., and Fan, C. Solving minimum-cost reach avoid using reinforcement learning.Advances in Neural Information Processing Systems, 37:30951–30984,
-
[11]
Reward Constrained Policy Optimization
Tessler, C., Mankowitz, D. J., and Mannor, S. Re- ward constrained policy optimization.arXiv preprint arXiv:1805.11074,
- [12]
-
[13]
Ying, C., Zhou, X., Su, H., Yan, D., Chen, N., and Zhu, J. Towards safe reinforcement learning via constraining con- ditional value-at-risk.arXiv preprint arXiv:2206.04436,
-
[14]
11 Stochastic Minimum-Cost Reach-Avoid Reinforcement Learning A. Proofs A.1. The proof for lemma 4.4 Proof.LetB(R n)denote the space of all bounded functions mapping fromR n toR. That is, B(Rn) = V:R n →R|sup x∈Rn |V(x)|<∞ . It is a standard result that the space B(Rn) of bounded functions, endowed with the supremum norm ∥V∥ ∞ = supx∈Rn |V(x)|, constitute...
work page 1999
-
[15]
Given thatγ∈(0,1), the operatorB π is a contraction mapping on the Banach space(B(R n),∥ · ∥ ∞)
=γ∥V 1 −V 2∥∞.(Expectation of constant is constant) Since the inequality |Bπ[V1](x)−B π[V2](x)| ≤γ∥V 1 −V 2∥∞ holds for all x∈R n, we can take the supremum over x on the left side: ∥Bπ[V1]−B π[V2]∥∞ = sup x∈Rn |Bπ[V1](x)−B π[V2](x)| ≤γ∥V 1 −V 2∥∞. Given thatγ∈(0,1), the operatorB π is a contraction mapping on the Banach space(B(R n),∥ · ∥ ∞). By the Banac...
work page 2026
-
[16]
that facilitates the computation of gradients. Definition B.1(Absorbing Markov Decision Process).The Absorbing Markov Decision Process is defined on f with an added absorbing states. We define the transition functionf ′ r with the absorbing state as f ′ r(x, a) = ( f(x, a),ifg(x)≥V π g,h(x)≥h(x), s,otherwise. (34) Denote byd ′ π(x)the stationary distribut...
work page 2023
-
[17]
employs state augmentation, defining g based on an augmented state ˜x, the function g(˜x)in their work effectively depends only on the original state component x. Recognizing this, our method simplifies the formulation by defining g directly on the original state x, thereby avoiding the need for state augmentation. Apart from this change, the remaining ex...
work page 2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.