Recognition: no theorem link
DexTwist: Dexterous Hand Retargeting for Twist Motion via Mixed Reality-based Teleoperation
Pith reviewed 2026-05-13 04:33 UTC · model grok-4.3
The pith
DexTwist retargets twist motions for dexterous hands by minimizing virtual-object turning angle and screw axis errors instead of direct pose matching.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
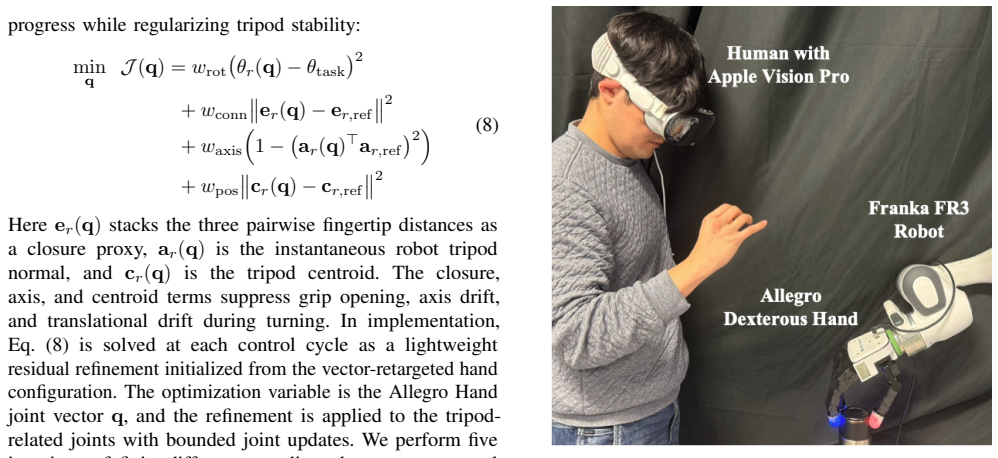
DexTwist detects a tripod pinch, estimates the operator's intended screw axis and twist magnitude, and applies a real-time residual joint-space refinement that tracks turning progress while regularizing the robot tripod geometry by minimizing a virtual-object objective defined by turning angle, screw axis consistency, fingertip closure, and tripod stability.
What carries the argument
The virtual-object objective minimization that combines turning angle, screw axis consistency, fingertip closure, and tripod stability to drive residual joint-space refinement.
If this is right
- Turning angle tracking improves over vector-based retargeting in both simulation and hardware tests.
- Screw axis remains more consistent during manipulation, reducing drift.
- Contact slip decreases and grasp stability increases for rotational tasks.
- Human manipulation skills transfer more directly through MR interfaces without matching exact kinematics.
Where Pith is reading between the lines
- The same functional objective approach could apply to other manipulation primitives such as sliding or pressing motions.
- Object-specific tuning of the stability weights might extend reliable performance to a broader set of shapes and materials.
- Combining the refinement with online adaptation could reduce the need for manual parameter adjustment during long sessions.
Load-bearing premise
Minimizing the virtual-object objective will reliably prevent real-world contact slip and grasp instability across varied objects and conditions.
What would settle it
Real-world experiments showing no gain in turning angle accuracy or continued screw axis drift on multiple objects would show that the virtual objective does not produce the claimed stability.
Figures


read the original abstract
Dexterous teleoperation via Mixed Reality (MR)-based interfaces offers a scalable paradigm for transferring human manipulation skills to dexterous robot hands. However, conventional retargeting approaches that minimize kinematic dissimilarity (e.g., joint angle or fingertip position error) often fail in contact-rich rotational manipulation, such as cap opening, key turning, and bolt screwing. This failure stems from the embodiment gap: mismatched link lengths, joint axes/limits, and fingertip geometry can cause direct pose imitation to induce tangential fingertip sliding rather than stable object rotation, resulting in screw axis drift, contact slip, and grasp instability. To address this, we propose DexTwist, a functional twist-retargeting framework for MR-based dexterous teleoperation. DexTwist detects a tripod pinch, estimates the operator's intended screw axis and twist magnitude, and applies a real-time residual joint-space refinement that tracks turning progress while regularizing the robot tripod geometry. The refinement minimizes a virtual-object objective defined by turning angle, screw axis consistency, fingertip closure, and tripod stability. Simulation and real-world experiments show that DexTwist improves turning angle tracking and screw axis stability compared with a vector-based retargeting baseline.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces DexTwist, a functional twist-retargeting framework for mixed reality-based dexterous teleoperation. It addresses limitations of conventional retargeting in contact-rich rotational tasks by detecting tripod pinch, estimating screw axis and twist magnitude, and performing residual joint-space refinement that minimizes a virtual-object objective consisting of turning angle, screw axis consistency, fingertip closure, and tripod stability. Simulation and real-world experiments are reported to demonstrate improved turning angle tracking and screw axis stability over a vector-based baseline.
Significance. If the experimental results hold under broader conditions, this work could provide a practical method to improve the reliability of dexterous teleoperation for tasks involving twisting motions, such as opening caps or screwing bolts, by better handling the embodiment gap between human and robot hands. The approach is notable for its real-time refinement step focused on functional objectives rather than pure kinematic matching.
major comments (1)
- Abstract: The central claim that the virtual-object objective produces stable real-world rotation and prevents contact slip rests on minimization of turning angle, screw axis consistency, fingertip closure, and tripod stability. This objective is described as purely kinematic/geometric with no explicit friction coefficients, normal-force limits, or contact dynamics. Consequently, the residual refinement may still permit tangential slip when real contact deviates from the assumed tripod geometry, undermining the generalization of the reported stability improvements beyond the tested objects.
minor comments (1)
- The abstract would be strengthened by including at least one quantitative metric (e.g., mean turning-angle error or screw-axis drift reduction with standard deviation) from the simulation and real-world experiments to allow readers to gauge the practical magnitude of the reported gains.
Simulated Author's Rebuttal
We thank the referee for their constructive feedback on our manuscript. We address the single major comment below and have revised the manuscript to better qualify our claims regarding the kinematic nature of the objective.
read point-by-point responses
-
Referee: Abstract: The central claim that the virtual-object objective produces stable real-world rotation and prevents contact slip rests on minimization of turning angle, screw axis consistency, fingertip closure, and tripod stability. This objective is described as purely kinematic/geometric with no explicit friction coefficients, normal-force limits, or contact dynamics. Consequently, the residual refinement may still permit tangential slip when real contact deviates from the assumed tripod geometry, undermining the generalization of the reported stability improvements beyond the tested objects.
Authors: We agree that the virtual-object objective is purely kinematic/geometric and does not model explicit friction coefficients, normal-force limits, or full contact dynamics; this design choice enables real-time performance in the teleoperation loop. Our simulation and real-world experiments demonstrate improved turning-angle tracking and screw-axis stability relative to the vector-based baseline under the maintained-tripod conditions tested. We acknowledge, however, that significant deviations from the assumed tripod geometry could still allow tangential slip, limiting generalization claims. We will revise the abstract to qualify the stability improvements as demonstrated for rigid tripod contact on the evaluated objects and add a limitations paragraph in the discussion section addressing the kinematic assumptions and scope of generalization. revision: yes
Circularity Check
No circularity; framework is an independent kinematic refinement
full rationale
The paper defines DexTwist as a real-time residual joint-space refinement that minimizes a virtual-object objective (turning angle + screw axis consistency + fingertip closure + tripod stability) after detecting a tripod pinch and estimating the intended screw axis. This objective is introduced as a new functional criterion to address embodiment-gap issues in contact-rich twist motions, not derived from or fitted to the target performance metrics. Validation proceeds via separate simulation and real-world experiments comparing against a vector-based baseline, with no equations shown that reduce the claimed improvements to the inputs by construction, no load-bearing self-citations, and no ansatzes or uniqueness theorems imported from prior author work. The derivation chain remains self-contained as a proposed algorithmic refinement.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Dexpilot: Vision-based teleopera- tion of dexterous robotic hand-arm system,
A. Handa, K. Van Wyk, W. Yang, J. Liang, Y .-W. Chao, Q. Wan, S. Birchfield, N. Ratliff, and D. Fox, “Dexpilot: Vision-based teleopera- tion of dexterous robotic hand-arm system,” in2020 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2020, pp. 9164–9170
work page 2020
-
[2]
Anyteleop: A general vision-based dexterous robot arm-hand teleoperation system,
Y . Qin, W. Yang, B. Huang, K. Van Wyk, H. Su, X. Wang, Y .-W. Chao, and D. Fox, “Anyteleop: A general vision-based dexterous robot arm-hand teleoperation system,” inRobotics: Science and Systems, 2023
work page 2023
-
[3]
B. Fang, F. Sun, H. Liu, and D. Guo, “A novel data glove using inertial and magnetic sensors for motion capture and robotic arm-hand teleoperation,”Industrial Robot: An International Journal, vol. 44, no. 2, pp. 155–165, 2017
work page 2017
-
[4]
Open-television: Teleoperation with immersive active visual feedback,
X. Cheng, J. Li, S. Yang, G. Yang, and X. Wang, “Open-television: Teleoperation with immersive active visual feedback,”arXiv preprint arXiv:2407.01512, 2024
-
[5]
Bunny-visionpro: Real-time bimanual dexterous teleoperation for imitation learning,
R. Ding, Y . Qin, J. Zhu, C. Jia, S. Yang, R. Yang, X. Qi, and X. Wang, “Bunny-visionpro: Real-time bimanual dexterous teleoperation for imitation learning,” in2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2025, pp. 12 248–12 255
work page 2025
-
[6]
Task-oriented hand motion retargeting for dexterous manipulation imitation,
D. Antotsiou, G. Garcia-Hernando, and T.-K. Kim, “Task-oriented hand motion retargeting for dexterous manipulation imitation,” in Proceedings of the European Conference on Computer Vision (ECCV) Workshops, September 2018
work page 2018
-
[7]
Vision-based teleoperation of shadow dexterous hand using end-to-end deep neural network,
S. Li, X. Ma, H. Liang, M. G ¨orner, P. Ruppel, B. Fang, F. Sun, and J. Zhang, “Vision-based teleoperation of shadow dexterous hand using end-to-end deep neural network,” in2019 International Conference on Robotics and Automation (ICRA). IEEE, 2019, pp. 416–422
work page 2019
-
[8]
Deep imitation learning for humanoid loco-manipulation through human teleoperation,
M. Seo, S. Han, K. Sim, S. H. Bang, C. Gonzalez, L. Sentis, and Y . Zhu, “Deep imitation learning for humanoid loco-manipulation through human teleoperation,” in2023 IEEE-RAS 22nd International Conference on Humanoid Robots (Humanoids). IEEE, 2023, pp. 1–8
work page 2023
-
[9]
Mobile aloha: Learning bimanual mobile manipulation using low-cost whole-body teleoperation,
Z. Fu, T. Z. Zhao, and C. Finn, “Mobile aloha: Learning bimanual mobile manipulation using low-cost whole-body teleoperation,” in8th Annual Conference on Robot Learning, 2024
work page 2024
-
[10]
Airexo: Low-cost exoskeletons for learning whole-arm manipulation in the wild,
H. Fang, H.-S. Fang, Y . Wang, J. Ren, J. Chen, R. Zhang, W. Wang, and C. Lu, “Airexo: Low-cost exoskeletons for learning whole-arm manipulation in the wild,” in2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 15 031–15 038
work page 2024
-
[11]
High-fidelity grasping in virtual reality using a glove-based system,
H. Liu, Z. Zhang, X. Xie, Y . Zhu, Y . Liu, Y . Wang, and S.-C. Zhu, “High-fidelity grasping in virtual reality using a glove-based system,” in2019 international conference on robotics and automation (ICRA). IEEE, 2019, pp. 5180–5186
work page 2019
-
[12]
Holo-dex: Teaching dexterity with immersive mixed reality,
S. P. Arunachalam, I. G ¨uzey, S. Chintala, and L. Pinto, “Holo-dex: Teaching dexterity with immersive mixed reality,”arXiv preprint arXiv:2210.06463, 2022
-
[13]
Baxter’s homunculus: Virtual reality spaces for teleoperation in manufacturing,
J. I. Lipton, A. J. Fay, and D. Rus, “Baxter’s homunculus: Virtual reality spaces for teleoperation in manufacturing,”IEEE Robotics and Automation Letters, vol. 3, no. 1, pp. 179–186, 2017
work page 2017
-
[14]
K. Wan, C. Li, F.-S. Lo, and P. Zheng, “A virtual reality-based immersive teleoperation system for remote human-robot collaborative manufacturing,”Manufacturing Letters, vol. 41, pp. 43–50, 2024
work page 2024
-
[15]
P. Ponomareva, D. Trinitatova, A. Fedoseev, I. Kalinov, and D. Tset- serukou, “Grasplook: a vr-based telemanipulation system with r-cnn- driven augmentation of virtual environment,” in2021 20th International Conference on Advanced Robotics (ICAR). IEEE, 2021, pp. 166–171
work page 2021
-
[16]
Open teach: A versatile teleoperation system for robotic manipulation,
A. Iyer, Z. Peng, Y . Dai, I. Guzey, S. Haldar, S. Chintala, and L. Pinto, “Open teach: A versatile teleoperation system for robotic manipulation,” arXiv preprint arXiv:2403.07870, 2024
-
[17]
Dexhub and dart: Towards internet scale robot data collection,
Y . Park, J. S. Bhatia, L. Ankile, and P. Agrawal, “Dexhub and dart: Towards internet scale robot data collection,”arXiv preprint arXiv:2411.02214, 2024
-
[18]
Learning dexterous robot hand control by imitating human hands,
Y . Yan and D. Lee, “Learning dexterous robot hand control by imitating human hands,” in2025 22nd International Conference on Ubiquitous Robots (UR). IEEE, 2025, pp. 307–312
work page 2025
-
[19]
Kinematic motion retargeting for contact-rich anthropomorphic manipulations,
A. S. Lakshmipathy, J. K. Hodgins, and N. S. Pollard, “Kinematic motion retargeting for contact-rich anthropomorphic manipulations,” ACM Transactions on Graphics, vol. 44, no. 2, pp. 1–20, 2025
work page 2025
-
[20]
Human hand motion retargeting for dexterous robotic hand,
J. Orbik, S. Li, and D. Lee, “Human hand motion retargeting for dexterous robotic hand,” in2021 18th International Conference on Ubiquitous Robots (UR). IEEE, 2021, pp. 264–270
work page 2021
-
[21]
Dex- machina: Functional retargeting for bimanual dexterous manipulation,
Z. Mandi, Y . Hou, D. Fox, Y . Narang, A. Mandlekar, and S. Song, “Dex- machina: Functional retargeting for bimanual dexterous manipulation,” arXiv preprint arXiv:2505.24853, 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.