Recognition: no theorem link
Neural Network-Based Virtual Wheel-Speed Sensor for Enhanced Low-Velocity State Estimation
Pith reviewed 2026-05-13 04:25 UTC · model grok-4.3
The pith
A neural network fuses wheel-speed and motor-speed signals to reduce low-velocity estimation errors by up to 85 percent in electric vehicles.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
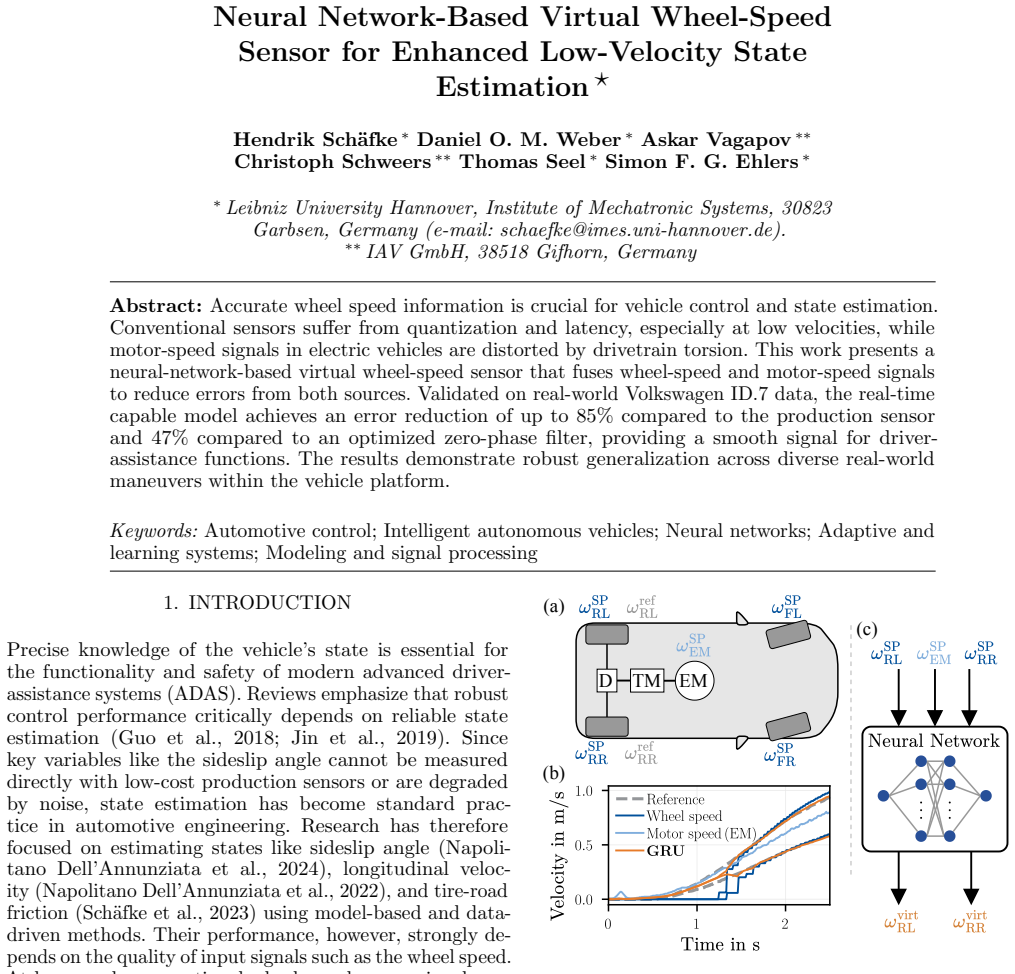
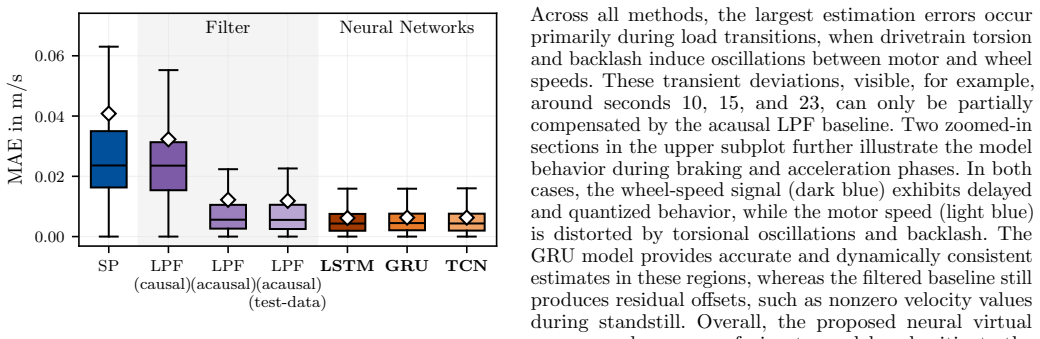
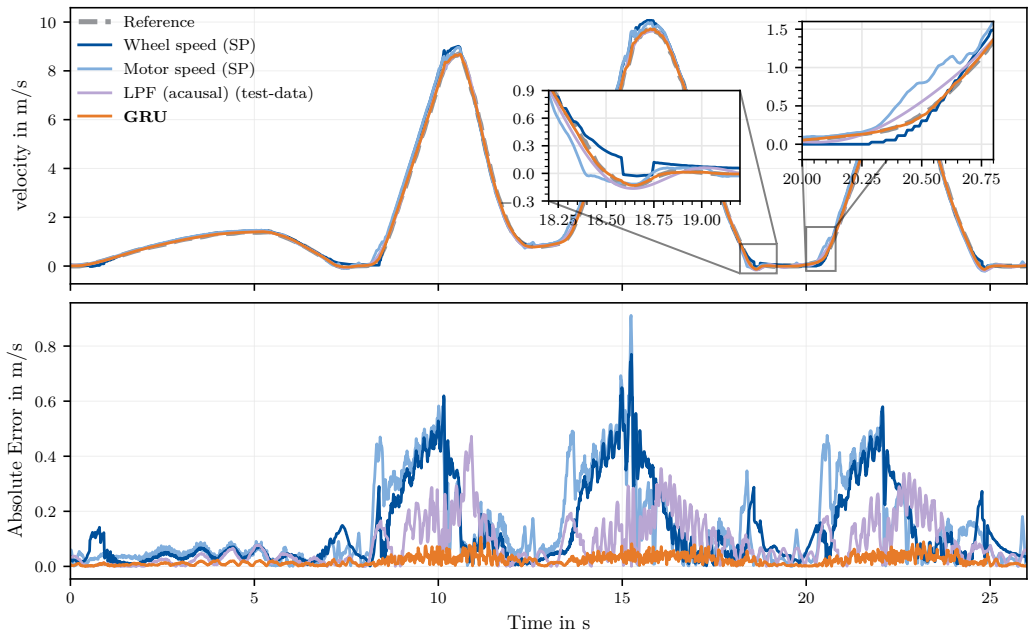
The neural-network-based virtual wheel-speed sensor fuses wheel-speed and motor-speed signals to reduce errors from both sources. Validated on real-world Volkswagen ID.7 data, the real-time capable model achieves an error reduction of up to 85% compared to the production sensor and 47% compared to an optimized zero-phase filter, providing a smooth signal for driver-assistance functions. The results demonstrate robust generalization across diverse real-world maneuvers within the vehicle platform.
What carries the argument
Neural network model that fuses wheel-speed and motor-speed signals to create an enhanced virtual wheel-speed estimate for low velocities.
If this is right
- The improved signal supports more precise vehicle state estimation at low speeds.
- Real-time performance enables seamless integration into production vehicles.
- Smoother signals can improve the performance of driver-assistance systems.
- Generalization across maneuvers indicates reliability in varied driving conditions.
Where Pith is reading between the lines
- This fusion technique could be adapted for other sensor fusion problems in automotive applications.
- Training on data from multiple vehicle platforms might extend the generalization beyond one platform.
- The approach could reduce the need for hardware upgrades in wheel speed sensors.
- Further improvements might come from incorporating additional vehicle dynamics signals.
Load-bearing premise
The neural network generalizes robustly across diverse real-world maneuvers within the vehicle platform without overfitting to the specific training data.
What would settle it
A test on unseen maneuvers or a different vehicle showing error reduction much lower than 85% or 47% would falsify the claim of robust generalization and superior performance.
Figures

read the original abstract
Accurate wheel speed information is crucial for vehicle control and state estimation. Conventional sensors suffer from quantization and latency, especially at low velocities, while motor-speed signals in electric vehicles are distorted by drivetrain torsion. This work presents a neural-network-based virtual wheel-speed sensor that fuses wheel-speed and motor-speed signals to reduce errors from both sources. Validated on real-world Volkswagen ID.7 data, the real-time capable model achieves an error reduction of up to 85% compared to the production sensor and 47% compared to an optimized zero-phase filter, providing a smooth signal for driver-assistance functions. The results demonstrate robust generalization across diverse real-world maneuvers within the vehicle platform.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a neural-network-based virtual wheel-speed sensor that fuses production wheel-speed signals with motor-speed signals to mitigate quantization, latency, and drivetrain torsion effects at low velocities in electric vehicles. Validated on real-world recordings from a Volkswagen ID.7, the real-time model is reported to achieve up to 85% error reduction versus the production sensor and 47% versus an optimized zero-phase filter while delivering a smooth signal suitable for driver-assistance functions, with claims of robust generalization across diverse maneuvers.
Significance. If the empirical claims can be substantiated with transparent methodology, the work would provide a practical, hardware-free improvement to low-velocity state estimation that is directly relevant to production vehicle control and ADAS. The use of real-world data rather than simulation is a strength, but the current lack of methodological detail prevents assessment of whether the reported gains are reproducible or generalizable beyond the specific vehicle and dataset.
major comments (3)
- [Abstract and Results section] Abstract and Results section: The headline performance figures (85% and 47% error reduction) and the generalization claim cannot be evaluated because the manuscript supplies no description of the neural-network architecture, loss function, training procedure, hyper-parameter selection, or cross-validation strategy.
- [Results section] Results section: The assertion of 'robust generalization across diverse real-world maneuvers' is undermined by the absence of any information on how the VW ID.7 dataset was partitioned into training and test sets (temporal split, maneuver-stratified split, or otherwise). Without such separation, it is impossible to determine whether the network learned a general fusion rule or merely memorized recurring correlations within the same recording sessions.
- [Results section] Results section: No statistical tests, confidence intervals, or per-maneuver error breakdowns are provided to support the quantitative claims, making it impossible to judge whether the reported improvements are statistically significant or consistent across the tested conditions.
minor comments (1)
- The manuscript would benefit from a block diagram or pseudocode of the neural-network input/output structure and from explicit statements of the real-time computational cost (e.g., inference latency on the target ECU).
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback, which highlights key areas for improving the transparency and rigor of our manuscript. We appreciate the recognition of the practical value of our real-world validation on the Volkswagen ID.7. We will revise the manuscript to address all major comments by adding the requested methodological details, dataset partitioning information, and statistical analyses. Our point-by-point responses follow.
read point-by-point responses
-
Referee: [Abstract and Results section] Abstract and Results section: The headline performance figures (85% and 47% error reduction) and the generalization claim cannot be evaluated because the manuscript supplies no description of the neural-network architecture, loss function, training procedure, hyper-parameter selection, or cross-validation strategy.
Authors: We agree that the manuscript currently lacks a detailed description of the neural-network architecture, loss function, training procedure, hyper-parameter selection, or cross-validation strategy, which limits reproducibility and evaluation of the reported gains. In the revised version, we will add a dedicated subsection in the Methods or Results section specifying the network architecture (e.g., input features, hidden layers, neuron counts, activation functions), the loss function (mean squared error for regression), the training procedure (optimizer, learning rate schedule, batch size, epochs, early stopping), hyper-parameter selection method (e.g., grid search or validation-based tuning), and the cross-validation strategy. This will enable readers to assess the 85% and 47% error reductions and the generalization claim. revision: yes
-
Referee: [Results section] Results section: The assertion of 'robust generalization across diverse real-world maneuvers' is undermined by the absence of any information on how the VW ID.7 dataset was partitioned into training and test sets (temporal split, maneuver-stratified split, or otherwise). Without such separation, it is impossible to determine whether the network learned a general fusion rule or merely memorized recurring correlations within the same recording sessions.
Authors: We acknowledge that the absence of train-test partitioning details weakens the generalization claim. The VW ID.7 dataset comprises multiple real-world recording sessions with diverse maneuvers. In the revision, we will explicitly describe the split (e.g., a temporal split using earlier sessions for training and later sessions for testing, or a maneuver-stratified split ensuring no maneuver overlap between sets). This will clarify that the model learns general wheel-motor signal fusion rules applicable across conditions rather than memorizing session-specific patterns. revision: yes
-
Referee: [Results section] Results section: No statistical tests, confidence intervals, or per-maneuver error breakdowns are provided to support the quantitative claims, making it impossible to judge whether the reported improvements are statistically significant or consistent across the tested conditions.
Authors: We agree that statistical support and breakdowns are needed to substantiate the quantitative claims. The revised manuscript will include per-maneuver error breakdowns (e.g., RMSE tables or plots stratified by velocity ranges and maneuver types), 95% confidence intervals around the error reduction figures, and statistical tests (e.g., paired t-tests or non-parametric equivalents) comparing the neural network outputs against the production sensor and zero-phase filter baselines. These additions will demonstrate significance and consistency across the tested real-world conditions. revision: yes
Circularity Check
No circularity: purely empirical NN validation with independent performance metrics
full rationale
The paper trains a neural network to fuse wheel-speed and motor-speed signals and reports error reductions (up to 85% vs. production sensor, 47% vs. zero-phase filter) on real-world VW ID.7 recordings. No equations, derivations, fitted parameters renamed as predictions, or self-citations appear in the abstract or described content. The central claims rest on direct empirical comparisons to external references (production hardware and a standard filter), not on any self-referential construction or load-bearing prior work by the authors. Generalization is asserted from the dataset but does not reduce to definitional circularity or fitted-input prediction.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Alshawi, A., De Pinto, S., Stano, P., van Aalst, S., Praet, K., Boulay, E., Ivone, D., Gruber, P., and Sorniotti, A. (2024). An adaptive unscented kalman filter for the estimation of the vehicle velocity components, slip angles, and slip ratios in extreme driving manoeuvres. Sensors, 24(2). doi:10.3390/s24020436
-
[2]
Bonfitto, A. and Feraco, S. (2021). A data-driven method for vehicle speed estimation. Communications - Scientific letters of the University of Zilina. doi:10.26552/com.C.2021.3.B165-B177
-
[3]
Cho, K., van Merri \"e nboer, B., Bahdanau, D., and Bengio, Y. (2014). On the properties of neural machine translation: Encoder--decoder approaches. In Proc. SSST-8, 103--111. ACL. doi:10.3115/v1/W14-4012
-
[4]
Ghosh, J., Tonoli, A., and Amati, N. (2018). A deep learning based virtual sensor for vehicle sideslip angle estimation: Experimental results. In SAE Technical Paper Series. doi:10.4271/2018-01-1089
-
[5]
Giuliacci, T.A., Ballesio, S., Fainello, M., Mair, U., and King, J. (2023). Recurrent neural network model for on-board estimation of the side-slip angle in a four-wheel drive and steering vehicle. SAE International Journal of Passenger Vehicle Systems, 17(15-17-01-0003), 37--48
work page 2023
-
[6]
Gonz \'a lez, L.P., S \'a nchez, S.S., Garcia-Guzman, J., Boada, M.J.L., and Boada, B.L. (2020). Simultaneous estimation of vehicle roll and sideslip angles through a deep learning approach. Sensors, 20(13). doi:10.3390/s20133679
-
[7]
Guo, H., Cao, D., Chen, H., Lv, C., Wang, H., and Yang, S. (2018). Vehicle dynamic state estimation: state of the art schemes and perspectives. IEEE/CAA Journal of Automatica Sinica, 5(2), 418--431. doi:10.1109/JAS.2017.7510811
-
[8]
Heidfeld, H., Schünemann, M., and Kasper, R. (2020). Ukf-based state and tire slip estimation for a 4wd electric vehicle. Vehicle System Dynamics, 58(10), 1479--1496. doi:10.1080/00423114.2019.1648836
-
[9]
Hermansdorfer, L., Trauth, R., Betz, J., and Lienkamp, M. (2020). End-to-end neural network for vehicle dynamics modeling. In 2020 6th IEEE Congress on Information Science and Technology (CiSt), 407--412. doi:10.1109/CiSt49399.2021.9357196
-
[10]
Hochreiter, S. and Schmidhuber, J. (1997). Long short-term memory. Neural computation, 9(8), 1735--1780. doi:10.1162/neco.1997.9.8.1735
-
[11]
Jin, X., Yin, G., and Chen, N. (2019). Advanced estimation techniques for vehicle system dynamic state: A survey. Sensors, 19(19), 4289. doi:10.3390/s19194289
-
[12]
Julier, S.J. and Uhlmann, J.K. (1997). New extension of the kalman filter to nonlinear systems. In SPIE Proceeding, volume 3068, 182--193. doi:10.1117/12.280797
-
[13]
Lea, C., Flynn, M.D., Vidal, R., Reiter, A., and Hager, G.D. (2016). Temporal convolutional networks for action segmentation and detection
work page 2016
-
[14]
Li, L., Jamieson, K., Rostamizadeh, A., Gonina, E., Ben-tzur, J., Hardt, M., Recht, B., and Talwalkar, A. (2020). A system for massively parallel hyperparameter tuning. In Third Conference on Systems and Machine Learning
work page 2020
-
[15]
Lio, M.D., Piccinini, M., and Biral, F. (2023). Robust and sample-efficient estimation of vehicle lateral velocity using neural networks with explainable structure informed by kinematic principles. IEEE Transactions on Intelligent Transportation Systems, 24(12), 13670--13684. doi:10.1109/TITS.2023.3303776
- [16]
-
[17]
Napolitano Dell’Annunziata, G., Arricale, V.M., Farroni, F., Genovese, A., Pasquino, N., and Tranquillo, G. (2022). Estimation of vehicle longitudinal velocity with artificial neural network. Sensors, 22(23). doi:10.3390/s22239516
-
[18]
Napolitano Dell’Annunziata, G., Ruffini, M., Stefanelli, R., Adiletta, G., Fichera, G., and Timpone, F. (2024). Four-wheeled vehicle sideslip angle estimation: A machine learning-based technique for real-time virtual sensor development. Applied Sciences, 14(3). doi:10.3390/app14031036
-
[19]
Onyekpe, U., Palade, V., Herath, A., Kanarachos, S., and Fitzpatrick, M.E. (2021). Whonet: Wheel odometry neural network for vehicular localisation in gnss-deprived environments. Engineering Applications of Artificial Intelligence, 105, 104421. doi:https://doi.org/10.1016/j.engappai.2021.104421
-
[20]
Pu, Z., Tang, L., Shangguan, W., Wang, W., and Jiang, K. (2023). Research on the estimation of vehicle speed under low-speed conditions based on multi-sensor information. Automotive Engineering, 45(7), 1235--1243
work page 2023
-
[21]
Ragab, H., Givigi, S., and Noureldin, A. (2025). Automotive speed estimation: Sensor types and error characteristics from obd-ii to adas. In 2025 IEEE/ION Position, Location and Navigation Symposium (PLANS), 124--130. doi:10.1109/PLANS61210.2025.11028310
-
[22]
Scamarcio, A., Gruber, P., De Pinto , S., and Sorniotti, A. (2020). Anti-jerk controllers for automotive applications: A review. Annual Reviews in Control, 50, 174--189. doi:https://doi.org/10.1016/j.arcontrol.2020.04.013
-
[23]
Sch \"a fke, H., Lampe, N., and Kortmann, K.P. (2023). Transformer neural networks for maximum friction coefficient estimation of tire-road contact using onboard vehicle sensors. In 2023 62nd IEEE Conference on Decision and Control (CDC), 5331--5338. doi:10.1109/CDC49753.2023.10384175
-
[24]
Srinivasan, S., Sa, I., Zyner, A., Reijgwart, V., Valls, M.I., and Siegwart, R. (2020). End-to-end velocity estimation for autonomous racing. IEEE Robotics and Automation Letters, 5(4), 6869--6875. doi:10.1109/LRA.2020.3016929
-
[25]
Weber, D. and Gühmann, C. (2021). Non-autoregressive vs autoregressive neural networks for system identification. IFAC-PapersOnLine, 54(20), 692--698. doi:10.1016/j.ifacol.2021.11.252. Modeling, Estimation and Control Conference MECC 2021
-
[26]
Weber, D.O. (2024). tsfast - a deep learning library for time series analysis and system identification. Github. ://github.com/daniel-om-weber/tsfast
work page 2024
-
[27]
Zhu, Z., Bei, S., Li, B., Liu, G., Tang, H., Zhu, Y., and Gao, C. (2023). Research on robust control of intelligent vehicle adaptive cruise. World Electric Vehicle Journal, 14(10). doi:10.3390/wevj14100268
-
[28]
Ziaukas, Z., Busch, A., and Wielitzka, M. (2021). Estimation of vehicle side-slip angle at varying road friction coefficients using a recurrent artificial neural network. In 2021 IEEE Conference on Control Technology and Applications (CCTA), 986--991. doi:10.1109/CCTA48906.2021.9658710
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.