Recognition: 2 theorem links
· Lean TheoremReinforcing VLAs in Task-Agnostic World Models
Pith reviewed 2026-05-13 04:10 UTC · model grok-4.3
The pith
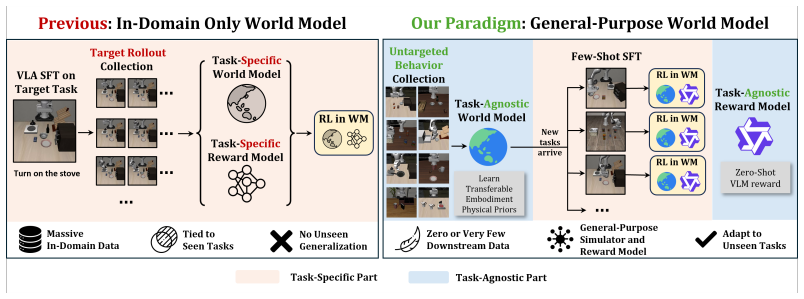
A task-agnostic world model pre-trained on diverse behaviors combined with an off-the-shelf VLM allows VLAs to be fine-tuned for new tasks entirely through zero-shot imagined rollouts.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central discovery is that generalized physical priors from a task-free pre-trained world model, paired with VLM-based rewards, enable effective zero-shot fine-tuning of VLAs in imagined environments, substituting for costly task-dependent data collection.
What carries the argument
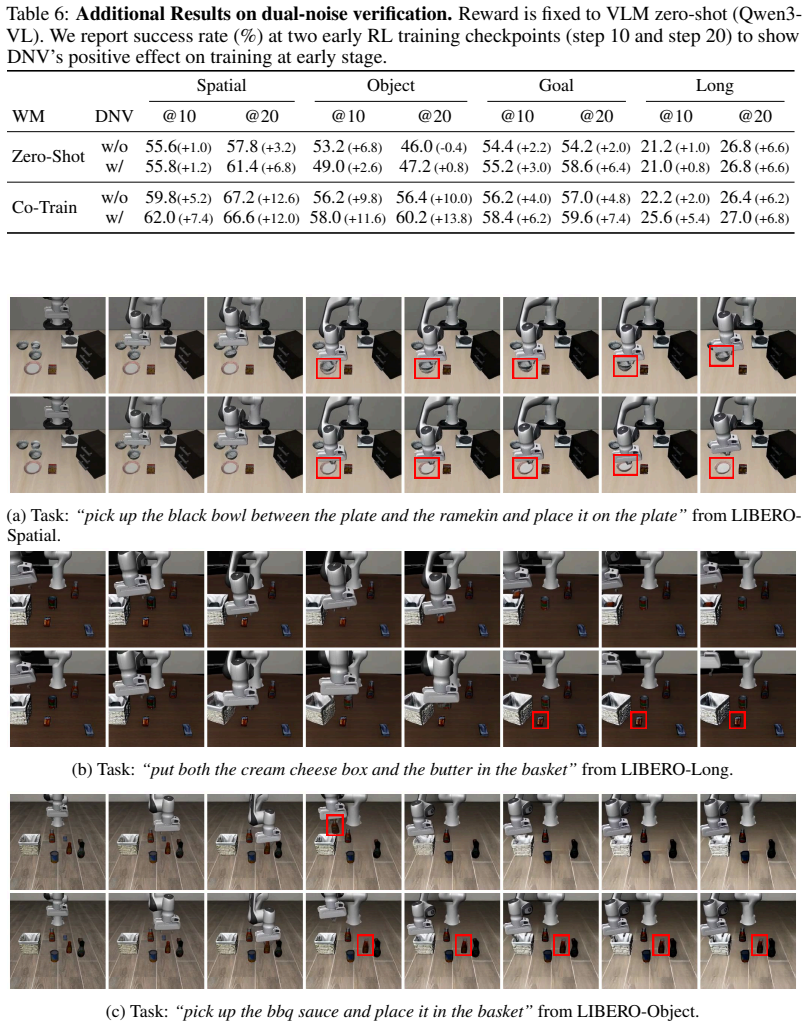
The RAW-Dream paradigm, which disentangles world model pre-training from any task and uses an off-the-shelf VLM for reward generation along with dual-noise verification to filter hallucinations.
If this is right
- VLAs can be adapted to arbitrary new tasks using only imagined trajectories from the general world model.
- Task-specific fine-tuning of world and reward models becomes unnecessary, improving scalability.
- Performance gains are observed across simulated and real-world environments.
- Generalized physical priors effectively replace task-dependent training data.
Where Pith is reading between the lines
- This approach might extend to more complex multi-step tasks where real data collection is especially expensive.
- Combining it with better world models could further reduce the impact of hallucinations.
- It opens the door to continuous online adaptation of VLAs as new tasks emerge without retraining infrastructure.
Load-bearing premise
That a world model pre-trained solely on diverse task-free behaviors will capture sufficiently accurate and transferable physical priors to support reliable zero-shot inference and reward generation via an off-the-shelf VLM on unseen tasks.
What would settle it
A test showing no performance improvement or failure to adapt on a new task with dynamics not well-represented in the task-free pre-training data would indicate the priors are insufficient.
Figures


read the original abstract
Post-training Vision-Language-Action (VLA) models via reinforcement learning (RL) in learned world models has emerged as an effective strategy to adapt to new tasks without costly real-world interactions. However, while using imagined trajectories reduces the sample complexity of policy training, existing methods still heavily rely on task-specific data to fine-tune both the world and reward models, fundamentally limiting their scalability to unseen tasks. To overcome this, we argue that world and reward models should capture transferable physical priors that enable zero-shot inference. We propose RAW-Dream (Reinforcing VLAs in task-Agnostic World Dreams), a new paradigm that completely disentangles world model learning from downstream task dependencies. RAW-Dream utilizes a world model pre-trained on diverse task-free behaviors for predicting future rollouts, and an off-the-shelf Vision-Language Model (VLM) for reward generation. Because both components are task-agnostic, VLAs can be readily finetuned for any new task entirely within this zero-shot imagination. Furthermore, to mitigate world model hallucinations, we introduce a dual-noise verification mechanism to filter out unreliable rollouts. Extensive experiments across simulation and real-world settings demonstrate consistent performance gains, proving that generalized physical priors can effectively substitute for costly task-dependent data, offering a highly scalable roadmap for VLA adaptation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes RAW-Dream, a paradigm for post-training Vision-Language-Action (VLA) models via RL entirely inside a task-agnostic world model pre-trained on diverse task-free behaviors. An off-the-shelf VLM generates rewards for imagined trajectories, and a dual-noise verification mechanism filters unreliable rollouts. The central claim is that this setup enables zero-shot fine-tuning of VLAs on arbitrary new tasks without any task-specific data or world-model adaptation, with experiments in simulation and on real robots showing consistent gains that demonstrate generalized physical priors can substitute for costly task-dependent data.
Significance. If the empirical claims are substantiated, the work would provide a scalable route to VLA adaptation that removes the need to collect task-specific interaction data for either the dynamics or reward model. This could materially lower the barrier to deploying VLAs on novel tasks by leveraging pre-trained, task-free priors.
major comments (3)
- [Abstract] Abstract: the assertion of 'consistent performance gains' and 'extensive experiments across simulation and real-world settings' is unsupported by any quantitative results, baselines, ablation tables, or statistical tests. Without these data it is impossible to determine whether the observed improvements actually validate the substitution of task-agnostic priors for task-specific data.
- [Abstract] Abstract: the dual-noise verification mechanism is introduced to 'mitigate world model hallucinations' yet no implementation details, filtering criteria, or ablation results are supplied. Its effectiveness therefore cannot be assessed, and the mechanism is load-bearing for the claim that imagined trajectories remain reliable on unseen tasks.
- [Abstract] Abstract: the premise that a world model trained solely on 'diverse task-free behaviors' will produce sufficiently accurate long-horizon predictions on novel task distributions is stated without any reported prediction-error metrics, rollout divergence statistics, or held-out task evaluations. This untested assumption directly underpins the zero-shot substitution argument.
minor comments (1)
- [Abstract] The abstract would be strengthened by the inclusion of at least one key quantitative result (e.g., success rate delta or sample-efficiency ratio) to allow readers to gauge the magnitude of the claimed gains.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our abstract. We agree that the abstract would benefit from explicit references to quantitative results and technical specifics to better support our claims. The full manuscript already contains these details in the experiments and methods sections. We will revise the abstract to incorporate key highlights and section references. Our point-by-point responses follow.
read point-by-point responses
-
Referee: [Abstract] Abstract: the assertion of 'consistent performance gains' and 'extensive experiments across simulation and real-world settings' is unsupported by any quantitative results, baselines, ablation tables, or statistical tests. Without these data it is impossible to determine whether the observed improvements actually validate the substitution of task-agnostic priors for task-specific data.
Authors: The full manuscript reports quantitative results in Section 5, including success-rate tables comparing RAW-Dream to task-specific baselines, ablation studies, and statistical tests (e.g., paired t-tests with p < 0.05) across simulation environments and real-robot deployments. These show consistent gains that support the substitution argument. We will revise the abstract to include representative metrics and explicit references to Section 5. revision: yes
-
Referee: [Abstract] Abstract: the dual-noise verification mechanism is introduced to 'mitigate world model hallucinations' yet no implementation details, filtering criteria, or ablation results are supplied. Its effectiveness therefore cannot be assessed, and the mechanism is load-bearing for the claim that imagined trajectories remain reliable on unseen tasks.
Authors: Section 3.4 details the dual-noise verification (independent noise injection into visual observations and action predictions, with a consistency threshold for rollout filtering), and Section 5.3 provides ablations quantifying its effect on hallucination reduction and downstream policy performance. We will add a brief description of the mechanism and its empirical impact to the revised abstract. revision: yes
-
Referee: [Abstract] Abstract: the premise that a world model trained solely on 'diverse task-free behaviors' will produce sufficiently accurate long-horizon predictions on novel task distributions is stated without any reported prediction-error metrics, rollout divergence statistics, or held-out task evaluations. This untested assumption directly underpins the zero-shot substitution argument.
Authors: Section 4 presents prediction-error metrics (MSE on visual and state predictions), rollout divergence statistics, and held-out task evaluations demonstrating that the task-free world model generalizes to novel distributions with low divergence. These results directly support the zero-shot premise. We will include a concise summary of these metrics in the revised abstract. revision: yes
Circularity Check
No significant circularity; derivation remains independent of target-task inputs
full rationale
The paper's central construction uses a pre-trained task-agnostic world model (trained on diverse task-free behaviors) and an off-the-shelf VLM for reward generation, then performs VLA fine-tuning inside the resulting zero-shot imagination with a dual-noise filter. No equations, fitted parameters, or self-citations are shown that define the claimed zero-shot capability in terms of the downstream task itself. The pre-training distribution and VLM are treated as external, independent components whose accuracy on novel tasks is an empirical claim rather than a definitional reduction. This matches the default expectation of a non-circular paper.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption A world model pre-trained on diverse task-free behaviors captures transferable physical priors that enable zero-shot inference on new tasks.
invented entities (1)
-
dual-noise verification mechanism
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
RAW-Dream utilizes a world model pre-trained on diverse task-free behaviors for predicting future rollouts, and an off-the-shelf Vision-Language Model (VLM) for reward generation.
-
IndisputableMonolith/Foundation/ArrowOfTime.leanz_monotone_absolute unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
we introduce a dual-noise verification mechanism to filter out unreliable rollouts
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Ali, A. et al. World simulation with video foundation models for physical ai.arXiv preprint arXiv:2511.00062, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[2]
Bai, S. et al. Qwen3-vl technical report.arXiv preprint arXiv:2511.21631, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[3]
Black, K. et al. π0: A vision-language-action flow model for general robot control.arXiv preprint arXiv:2410.24164, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
- [4]
- [5]
- [6]
-
[7]
Collaboration, O.X.E. et al. Open X-Embodiment: Robotic learning datasets and RT-X models. https://arxiv.org/abs/2310.08864, 2023
work page internal anchor Pith review Pith/arXiv arXiv 2023
- [8]
-
[9]
He, H. et al. Pre-trained video generative models as world simulators. InProceedings of the AAAI Conference on Artificial Intelligence, volume 40, pages 4645–4653, 2026
work page 2026
- [10]
-
[11]
Intelligence, P. et al. π∗ 0.6: a vla that learns from experience.arXiv preprint arXiv: 2511.14759, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[12]
Intelligence, P. et al. π0.5: a vision-language-action model with open-world generalization. arXiv preprint arXiv:2504.16054, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
- [13]
-
[14]
Kidambi, R. et al. Morel: Model-based offline reinforcement learning.Advances in neural information processing systems, 33:21810–21823, 2020
work page 2020
-
[15]
Kim, M.J. et al. Openvla: An open-source vision-language-action model.arXiv preprint arXiv:2406.09246, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[16]
Fine-Tuning Vision-Language-Action Models: Optimizing Speed and Success
Kim, M.J., Finn, C. and Liang, P. Fine-tuning vision-language-action models: Optimizing speed and success.arXiv preprint arXiv:2502.19645, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[17]
Li, H. et al. Simplevla-rl: Scaling vla training via reinforcement learning.arXiv preprint arXiv:2509.09674, 2025
work page internal anchor Pith review arXiv 2025
- [18]
-
[19]
Liang, A. et al. Robometer: Scaling general-purpose robotic reward models via trajectory comparisons.arXiv preprint arXiv:2603.02115, 2026
work page internal anchor Pith review arXiv 2026
-
[20]
Liu, B. et al. Libero: Benchmarking knowledge transfer for lifelong robot learning.Advances in Neural Information Processing Systems, 36:44776–44791, 2023
work page 2023
- [21]
-
[22]
Flow Straight and Fast: Learning to Generate and Transfer Data with Rectified Flow
Liu, X., Gong, C. and Liu, Q. Flow straight and fast: Learning to generate and transfer data with rectified flow.arXiv preprint arXiv:2209.03003, 2022
work page internal anchor Pith review Pith/arXiv arXiv 2022
- [23]
- [24]
-
[25]
Mazzaglia, P. et al. Genrl: Multimodal-foundation world models for generalization in embodied agents.Advances in neural information processing systems, 37:27529–27555, 2024. 10
work page 2024
-
[26]
Peebles, W. and Xie, S. Scalable diffusion models with transformers. InProceedings of the IEEE/CVF international conference on computer vision, pages 4195–4205, 2023
work page 2023
- [27]
-
[28]
Sekar, R. et al. Planning to explore via self-supervised world models. InInternational conference on machine learning, pages 8583–8592. PMLR, 2020
work page 2020
-
[29]
Shao, Z. et al. Deepseekmath: Pushing the limits of mathematical reasoning in open language models.arXiv preprint arXiv:2402.03300, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
- [30]
- [31]
-
[32]
Tong, Z. et al. Videomae: Masked autoencoders are data-efficient learners for self-supervised video pre-training.Advances in neural information processing systems, 35:10078–10093, 2022
work page 2022
- [33]
-
[34]
Wan, T. et al. Wan: Open and advanced large-scale video generative models.arXiv preprint arXiv:2503.20314, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
- [35]
-
[36]
Wang, Y . et al. Co-evolving latent action world models.arXiv preprint arXiv:2510.26433, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[37]
Xiao, J. et al. World-env: Leveraging world model as a virtual environment for vla post-training. arXiv preprint arXiv:2509.24948, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[38]
Xu, C. et al. Rl token: Bootstrapping online rl with vision-language-action models.arXiv preprint arXiv:2604.23073, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[39]
Yang, J. et al. Rise: Self-improving robot policy with compositional world model.arXiv preprint arXiv:2602.11075, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[40]
Yin, T. et al. Playworld: Learning robot world models from autonomous play.arXiv preprint arXiv:2603.09030, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
- [41]
-
[42]
Yu, T. et al. Mopo: Model-based offline policy optimization.Advances in neural information processing systems, 33:14129–14142, 2020
work page 2020
- [43]
- [44]
-
[45]
Zhu, F. et al. Irasim: A fine-grained world model for robot manipulation. InProceedings of the IEEE/CVF International Conference on Computer Vision, pages 9834–9844, 2025
work page 2025
-
[46]
Wmpo: World model-based policy optimization for vision-language-action models, 2025
Zhu, F. et al. Wmpo: World model-based policy optimization for vision-language-action models. arXiv preprint arXiv:2511.09515, 2025. 11 A Implementation Details A.1 Action-Conditioned World Model Architecture.We build on the WAN 2.1 T2V-1.3B DiT backbone with a paired V AE (latent dim C=16, stride (4,8,8) ), yielding a 32×32 spatial latent grid from 256×2...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.