Recognition: 2 theorem links
· Lean TheoremMulti-Variable Conformal Prediction: Optimizing Prediction Sets without Data Splitting
Pith reviewed 2026-05-13 03:49 UTC · model grok-4.3
The pith
Multi-variable conformal prediction unifies the design and calibration of prediction sets into one optimization that uses all data without splitting.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
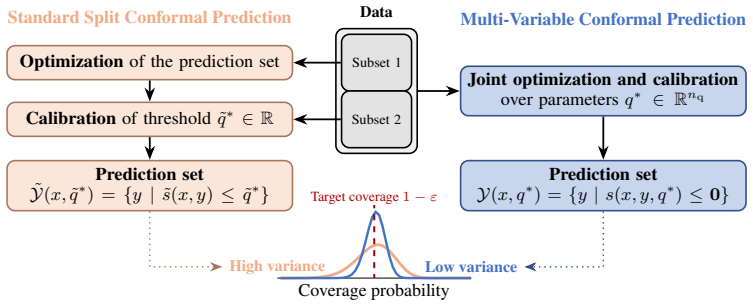
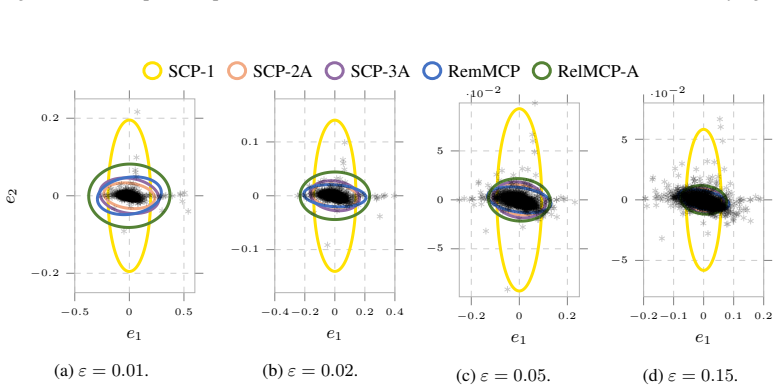
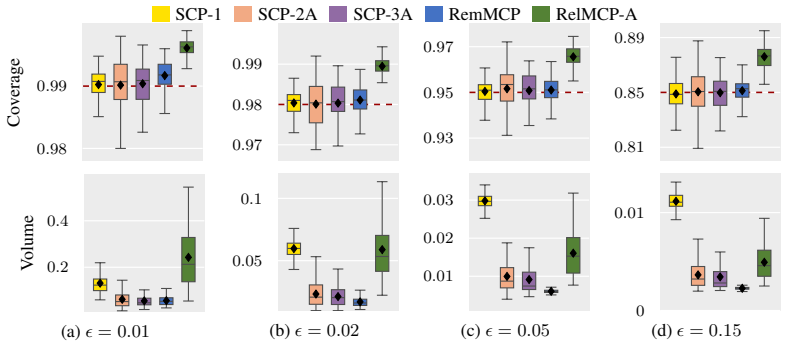
Multi-variable conformal prediction (MCP) extends conformal prediction by allowing vector-valued score functions and multiple simultaneous calibration variables. It unifies prediction set design and calibration into a single optimization problem certified by scenario theory, so that the entire dataset can be used for both steps without data splitting and without losing the finite-sample coverage guarantee. The framework is instantiated in two variants that achieve the target coverage with prediction sets that are smaller than or comparable to split-based baselines and with lower variance across calibration runs.
What carries the argument
Multi-variable conformal prediction (MCP), a joint optimization over vector-valued scores and multiple calibration variables whose solutions are certified for coverage by scenario theory.
If this is right
- Prediction set shapes can be optimized jointly with calibration instead of being fixed in advance.
- All available data contributes to both design and calibration, which reduces variance in the resulting set sizes.
- Target coverage is maintained without any data split, generalizing the guarantees of split conformal prediction.
- RemMCP solves convex cases through constraint removal; RelMCP handles non-convex score functions through relaxation at the possible cost of larger sets.
Where Pith is reading between the lines
- MCP could be especially useful in domains where labeled data is scarce, because every sample participates in both shape selection and threshold calibration.
- The same joint-optimization pattern might transfer to other uncertainty-quantification settings that currently rely on separate calibration stages.
- Numerical gains observed on ellipsoidal and multi-modal sets suggest the approach may scale to higher-dimensional or structured prediction problems where fixed shapes are inefficient.
Load-bearing premise
Scenario theory still supplies finite-sample coverage guarantees when the score function is vector-valued and several calibration variables are optimized together.
What would settle it
An empirical coverage rate that falls below the nominal level in repeated finite-sample trials on a distribution where the joint optimization produces sets that are too tight.
Figures




read the original abstract
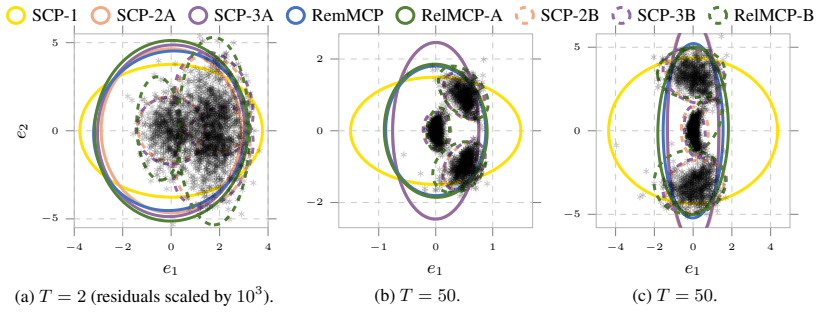
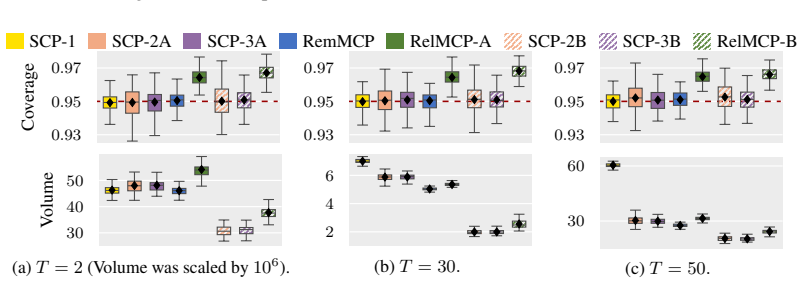
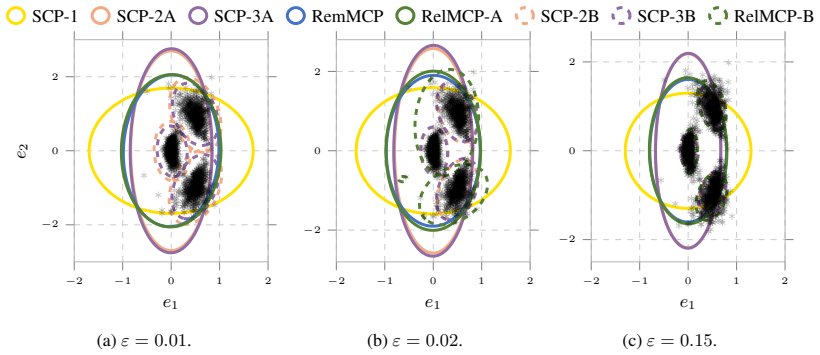
Conformal prediction constructs prediction sets with finite-sample coverage guarantees, but its calibration stage is structurally constrained to a scalar score function and a single threshold variable - forcing shapes of prediction sets to be fixed before calibration, typically through data splitting. We introduce multi-variable conformal prediction (MCP), a framework that extends conformal prediction to vector-valued score functions with multiple simultaneous calibration variables. Building on scenario theory as a principled framework for certifying data-driven decisions, MCP unifies prediction set design and calibration into a single optimization problem, eliminating data splitting without sacrificing coverage guarantees. We propose two computationally efficient variants: RemMCP, grounded in constrained optimization with constraint removal, which admits a clean generalization of split conformal prediction; and RelMCP, based on iterative optimization with constraint relaxation, which supports non-convex score functions at the cost of possibly greater conservatism. Through numerical experiments on ellipsoidal and multi-modal prediction sets, we demonstrate that RemMCP and RelMCP consistently meet the target coverage with prediction set sizes smaller than or comparable to those of baselines with data split, while considerably reducing variance across calibration runs - a direct consequence of using all available data for shape optimization and calibration simultaneously.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces multi-variable conformal prediction (MCP), a framework that extends conformal prediction to vector-valued score functions and multiple simultaneous calibration variables. It unifies prediction set shape design and calibration into a single optimization problem using scenario theory, eliminating data splitting while claiming to preserve finite-sample coverage guarantees. Two variants are proposed: RemMCP (constraint removal for convex cases, generalizing split conformal) and RelMCP (relaxation for non-convex scores). Experiments on ellipsoidal and multi-modal sets show target coverage is met with smaller or comparable set sizes and reduced variance compared to split baselines.
Significance. If the coverage guarantees are rigorously established, the result would be significant for conformal prediction by removing the data-splitting requirement and enabling joint optimization of flexible set shapes. This could yield more efficient and stable prediction sets in practice, with direct benefits for applications needing non-standard geometries. The use of scenario theory for certification is a principled strength, and the empirical variance reduction is a clear practical advantage when all data is used jointly.
major comments (3)
- [§3] §3 (MCP framework) and the scenario-theory application: the central claim that finite-sample coverage is preserved (at least as strong as split conformal) when jointly optimizing shape parameters and multiple thresholds over the full dataset with vector-valued scores requires an explicit re-derivation. Standard scenario theory bounds depend on the number of support constraints and Helly dimension after solving the sampled convex program; the manuscript invokes the theory directly without showing that the multi-variable structure and joint optimization leave the violation probability bound unchanged or recover the exact 1-α exchangeability guarantee.
- [§3.1] RemMCP definition and generalization claim (likely §3.1): the constraint-removal procedure is presented as a clean generalization of split conformal, but it is unclear whether removing constraints after joint optimization over the entire calibration set preserves the exact marginal coverage without introducing data-dependent bias in the support count. A concrete example or lemma showing equivalence to the standard split case under scalar scores would strengthen this.
- [§3.2] RelMCP and non-convex case (likely §3.2): the relaxation approach is said to support non-convex scores at the cost of greater conservatism, yet no explicit high-probability bound or comparison to the exact guarantee is provided. If the central 'without sacrificing coverage' assertion is to hold for both variants, the manuscript must clarify whether RelMCP delivers the same finite-sample guarantee or only an approximate one.
minor comments (3)
- [§2] Notation for vector-valued scores and the multi-variable threshold vector should be introduced earlier and used consistently (e.g., clarify the dimension of the score function in the optimization problem statement).
- [§5] The experimental section would benefit from reporting the exact fraction of data used in split baselines and including statistical significance tests or confidence intervals on the variance reduction claim.
- A short appendix with the full scenario-theory derivation for the MCP setting would make the coverage argument self-contained and easier to verify.
Simulated Author's Rebuttal
We thank the referee for the careful and constructive review of our manuscript. We address each major comment point by point below, providing clarifications and committing to specific revisions that strengthen the theoretical presentation without altering the core claims.
read point-by-point responses
-
Referee: [§3] §3 (MCP framework) and the scenario-theory application: the central claim that finite-sample coverage is preserved (at least as strong as split conformal) when jointly optimizing shape parameters and multiple thresholds over the full dataset with vector-valued scores requires an explicit re-derivation. Standard scenario theory bounds depend on the number of support constraints and Helly dimension after solving the sampled convex program; the manuscript invokes the theory directly without showing that the multi-variable structure and joint optimization leave the violation probability bound unchanged or recover the exact 1-α exchangeability guarantee.
Authors: We agree that an explicit re-derivation would improve clarity and rigor. In the revised manuscript we will add a dedicated paragraph in §3 that re-derives the coverage bound for the multi-variable setting. The argument proceeds by noting that the joint optimization remains a convex program in the decision variables (shape parameters together with the vector of thresholds); the number of support constraints is therefore still controlled by the Helly dimension of the feasible set, and the standard scenario-theory violation probability bound applies unchanged. Consequently the finite-sample guarantee is at least as strong as that of split conformal prediction under exchangeability. We will also state explicitly that the 1-α marginal coverage is recovered exactly when the score function is scalar. revision: yes
-
Referee: [§3.1] RemMCP definition and generalization claim (likely §3.1): the constraint-removal procedure is presented as a clean generalization of split conformal, but it is unclear whether removing constraints after joint optimization over the entire calibration set preserves the exact marginal coverage without introducing data-dependent bias in the support count. A concrete example or lemma showing equivalence to the standard split case under scalar scores would strengthen this.
Authors: We acknowledge that the current presentation leaves this equivalence implicit. In the revision we will insert a short lemma (new Lemma 3.1) proving that, when the score function is scalar and no shape parameters are optimized, the RemMCP constraint-removal step is algebraically identical to selecting the (1-α)-quantile of the scalar scores on the full calibration set. Because the points remain exchangeable, the support count is unbiased and the exact marginal coverage guarantee is recovered. We will also add a one-dimensional numerical example that reproduces the classical split-conformal threshold exactly. revision: yes
-
Referee: [§3.2] RelMCP and non-convex case (likely §3.2): the relaxation approach is said to support non-convex scores at the cost of greater conservatism, yet no explicit high-probability bound or comparison to the exact guarantee is provided. If the central 'without sacrificing coverage' assertion is to hold for both variants, the manuscript must clarify whether RelMCP delivers the same finite-sample guarantee or only an approximate one.
Authors: We thank the referee for requesting this clarification. The manuscript already notes that RelMCP incurs 'possibly greater conservatism'; we will make the distinction explicit in the revised §3.2 by stating that RelMCP yields a conservative high-probability coverage bound obtained from the relaxed program, which may exceed the nominal 1-α level. The exact finite-sample guarantee of scenario theory applies only to the convex RemMCP case. We will add a short comparison paragraph and report the empirical excess coverage observed for RelMCP in the experiments. revision: yes
Circularity Check
MCP extends scenario theory to multi-variable optimization without reducing claims to self-defined inputs or fitted predictions
full rationale
The paper's central contribution is a new multi-variable optimization framework (MCP) that unifies prediction set design and calibration. It explicitly builds on existing scenario theory (with one author overlap) but introduces novel structures like RemMCP and RelMCP for vector-valued scores and joint optimization. No equations or steps in the abstract or description reduce the coverage guarantees or size improvements by construction to previously fitted parameters, self-citations, or renamed known results. The derivation remains self-contained as an extension with claimed finite-sample properties, warranting only a minor self-citation score rather than load-bearing circularity.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/ArithmeticFromLogic; CostJcost uniqueness / washburn_uniqueness_aczel unclearTheorem 1... E[η(q*)] ≥ 1−ε... η(q*) ∼ Beta(n_cal − n_q(ρ+1)+1, n_q(ρ+1))
Reference graph
Works this paper leans on
-
[1]
Jaulin, L. AND Kieffer, M. AND Didrit, O. , publisher =. Applied Interval Analysis , year =
-
[2]
International Journal of Control , volume =
Christophe Combastel and Ali Zolghadri , title =. International Journal of Control , volume =
-
[3]
Chabane, S. Ben and Maniu, C. Stoica and Alamo, T. and Camacho, E.F. and Dumur, D. , booktitle=. Improved set-membership estimation approach based on zonotopes and ellipsoids , year=
-
[4]
Probabilistic reachability and safety for controlled discrete time stochastic hybrid systems , journal =. 2008 , author =
work page 2008
- [5]
-
[6]
Reachable Set Over-Approximation for Nonlinear Systems Using Piecewise Barrier Tubes
Kong, Hui and Bartocci, Ezio and Henzinger, Thomas A. Reachable Set Over-Approximation for Nonlinear Systems Using Piecewise Barrier Tubes. International Conference on Computer Aided Verification. 2018
work page 2018
-
[7]
Approximate Reachability Analysis of Piecewise-Linear Dynamical Systems
Asarin, Eugene and Bournez, Olivier and Dang, Thao and Maler, Oded. Approximate Reachability Analysis of Piecewise-Linear Dynamical Systems. Hybrid Systems: Computation and Control. 2000
work page 2000
-
[8]
Reachability analysis of linear systems using support functions , journal =. 2010 , author =
work page 2010
-
[9]
Linear Encodings for Polytope Containment Problems , year=
Sadraddini, Sadra and Tedrake, Russ , booktitle=. Linear Encodings for Polytope Containment Problems , year=
-
[10]
Reachability Analysis for Cyber-Physical Systems: A re We There Yet?
Chen, Xin and Sankaranarayanan, Sriram. Reachability Analysis for Cyber-Physical Systems: A re We There Yet?. NASA Formal Methods. 2022
work page 2022
-
[11]
Marruedo, Daniel L. and Bravo, José M. and Alamo, Teodoro and Camacho, Eduardo F. , booktitle=. Robust. 2002 , volume=
work page 2002
-
[12]
Computation and application of
Berz, Martin AND Hoffstätter, Georg , journal =. Computation and application of
-
[13]
Mitchell, Ian M. and Bayen, Alexandre M. and Tomlin, Claire J. , journal=. A time-dependent. 2005 , volume=
work page 2005
-
[14]
Villegas Pico, Hugo N. and Aliprantis, Dionysios C. , journal=. Voltage Ride-Through Capability Verification of Wind Turbines With Fully-Rated Converters Using Reachability Analysis , year=
-
[15]
and Budzis, Jacob and Bolyachevets, Andriy , booktitle =
Mitchell, Ian M. and Budzis, Jacob and Bolyachevets, Andriy , booktitle =. Invariant, Viability and Discriminating Kernel under-Approximation via Zonotope Scaling , year =
-
[16]
Reachability of uncertain linear systems using zonotopes , year =
Antoine Girard , booktitle =. Reachability of uncertain linear systems using zonotopes , year =
-
[17]
Rigorously Computed Orbits of Dynamical Systems without the Wrapping Effect , year =
K\". Rigorously Computed Orbits of Dynamical Systems without the Wrapping Effect , year =. Computing , pages =
-
[18]
A. Girard and C. Efficient Computation of Reachable Sets of Linear Time-Invariant Systems with Inputs , year =. ACM International Conference on Hybrid Systems: Computation and Control , pages =
-
[19]
Prajna, Stephen and Jadbabaie, Ali and Pappas, George J. , journal=. A Framework for Worst-Case and Stochastic Safety Verification Using Barrier Certificates , year=
-
[20]
On Contraction Analysis for Non-linear Systems , journal =. 1998 , author =
work page 1998
-
[21]
Allen, Ross E. and Clark, Ashley A. and Starek, Joseph A. and Pavone, Marco , booktitle=. A machine learning approach for real-time reachability analysis , year=
-
[22]
Active Learning for Estimating Reachable Sets for Systems With Unknown Dynamics , volume =
Chakrabarty, Ankush and Danielson, Claus and Di Cairano, Stefano and Raghunathan, Arvind , year =. Active Learning for Estimating Reachable Sets for Systems With Unknown Dynamics , volume =
-
[23]
Data-Driven Reachability Analysis from Noisy Data , year=
Alanwar, Amr and Koch, Anne and Allgöwer, Frank and Johansson, Karl Henrik , journal=. Data-Driven Reachability Analysis from Noisy Data , year=
-
[24]
Data-Driven Reachability with Scenario Optimization and the Holdout Method , year=
Dietrich, Elizabeth and Devonport, Rosalyn and Tu, Stephen and Arcak, Murat , booktitle=. Data-Driven Reachability with Scenario Optimization and the Holdout Method , year=
-
[25]
Data-Driven Reachability Analysis with Christoffel Functions , year=
Devonport, Alex and Yang, Forest and El Ghaoui, Laurent and Arcak, Murat , booktitle=. Data-Driven Reachability Analysis with Christoffel Functions , year=
-
[26]
Symposium on Conformal and Probabilistic Prediction with Applications , pages =
Data-driven Reachability using Christoffel Functions and Conformal Prediction , author =. Symposium on Conformal and Probabilistic Prediction with Applications , pages =
-
[27]
Hashemi, Navid and Qin, Xin and Lindemann, Lars and Deshmukh, Jyotirmoy V. , booktitle=. Data-Driven Reachability Analysis of Stochastic Dynamical Systems with Conformal Inference , year=
-
[28]
Data-driven and model-based verification via. Automatica , volume =. 2017 , author =
work page 2017
-
[29]
Data-Driven Reachability Analysis for Nonlinear Systems , year=
Park, Hyunsang and Vijay, Vishnu and Hwang, Inseok , journal=. Data-Driven Reachability Analysis for Nonlinear Systems , year=
-
[30]
Active Learning for Estimating Reachable Sets for Systems With Unknown Dynamics , year=
Chakrabarty, Ankush and Danielson, Claus and Cairano, Stefano Di and Raghunathan, Arvind , journal=. Active Learning for Estimating Reachable Sets for Systems With Unknown Dynamics , year=
-
[31]
Data-Driven Reachable Set Computation using Adaptive
Devonport, Alex and Arcak, Murat , booktitle=. Data-Driven Reachable Set Computation using Adaptive. 2020 , pages=
work page 2020
-
[32]
Ramapuram Matavalam, Amarsagar Reddy and Vaidya, Umesh and Ajjarapu, Venkataramana , booktitle=. Data-Driven Approach for Uncertainty Propagation and Reachability Analysis in Dynamical Systems , year=
-
[33]
and Goubault, Eric and Putot, Sylvie and Topcu, Ufuk , booktitle=
Djeumou, Franck and Vinod, Abraham P. and Goubault, Eric and Putot, Sylvie and Topcu, Ufuk , booktitle=. On-The-Fly Control of Unknown Smooth Systems from Limited Data , year=
-
[34]
Conference on Learning for Dynamics and Control , pages=
Nonconvex scenario optimization for data-driven reachability , author=. Conference on Learning for Dynamics and Control , pages=
-
[35]
Guaranteed Nonlinear Parameter Estimation for Continuous-time Dynamical Models , booktitle =. 2006 , author =
work page 2006
-
[36]
Alamo, T. and Bravo, J.M. and Camacho, E.F. , booktitle=. Guaranteed state estimation by zonotopes , year=
- [37]
-
[38]
Kurzhanskiy, Alexander B. and Varaiya, Pravin. Ellipsoidal Techniques for Reachability Analysis. Hybrid Systems: Computation and Control. 2000
work page 2000
-
[39]
Mo, S. H. and Norton, J. P. , title =. Mathematics and Computers in Simulation , pages =. 1990 , publisher =
work page 1990
-
[40]
Interval Parameter Estimation under Model Uncertainty , journal =. 2005 , author =
work page 2005
-
[41]
International Journal of Adaptive Control and Signal Processing , volume =
Kieffer, Michel and Walter, Eric , title =. International Journal of Adaptive Control and Signal Processing , volume =
-
[42]
Rauh, Andreas and Kersten, Julia and Aschemann, Harald , year =. Interval methods and contractor-based branch-and-bound procedures for verified parameter identification of quasi-linear cooperative system models , volume =
-
[43]
Mahato, Nisha Rani and Jaulin, Luc and Chakraverty, S. and Dezert, Jean. Validated Enclosure of Uncertain Nonlinear Equations Using SIVIA Monte Carlo. Recent Trends in Wave Mechanics and Vibrations. 2020
work page 2020
-
[44]
Polyak, Boris T. and Nazin, Sergey A. and Durieu, C\'. Ellipsoidal Parameter or State Estimation under Model Uncertainty , year =. Automatica , pages =
-
[45]
Feasible Parameter Set Approximation for Linear Models with Bounded Uncertain Regressors , year=
Casini, Marco and Garulli, Andrea and Vicino, Antonio , journal=. Feasible Parameter Set Approximation for Linear Models with Bounded Uncertain Regressors , year=
-
[46]
Novara, C. and Milanese, M. , booktitle=. Set membership identification of nonlinear systems , year=
-
[47]
Bravo, J.M. and Alamo, T. and Camacho, E.F. , journal=. Bounded error identification of systems with time-varying parameters , year=
-
[48]
Estimation of parameter bounds from bounded-error data:
Walter, Eric and Piet-Lahanier, H\'. Estimation of parameter bounds from bounded-error data:. Mathematics and Computers in Simulation , pages =. 1990 , volume =
work page 1990
-
[49]
Canale, M. and Fagiano, L. and Signorile, M. C. , title =. Asian Journal of Control , volume =
-
[50]
Conference on Learning for Dynamics and Control , pages =
Data-Driven Reachability Analysis Using Matrix Zonotopes , author =. Conference on Learning for Dynamics and Control , pages =. 2021 , volume =
work page 2021
-
[51]
Data-Driven Computation of Robust Control Invariant Sets With Concurrent Model Selection , year=
Chen, Yuxiao and Ozay, Necmiye , journal=. Data-Driven Computation of Robust Control Invariant Sets With Concurrent Model Selection , year=
- [52]
-
[53]
Peter Overschee and Bart Moor , title =
- [54]
-
[55]
Tokunbo Ogunfunmi , title =
-
[56]
Roland Tóth , title =
-
[57]
Rolf Isermann and Marco Münchhof , title =
- [58]
-
[59]
Anish Deb and Srimanti Roychoudhury and Gautam Sarkar , title =
-
[60]
Numerical Identification of Linear Dynamic Systems from Normal Operating Records , booktitle =. 1965 , author =
work page 1965
- [61]
-
[62]
Automatisierungstechnik , year =
Effective construction of linear state-variable models from input/output functions , author =. Automatisierungstechnik , year =
-
[63]
Advances in System Identification:
Guého, Damien and Singla, Puneet and Majji, Manoranjan and Juang, Jer-Nan , booktitle=. Advances in System Identification:. 2021 , volume=
work page 2021
-
[64]
Nonlinear System Identification:
Schoukens, Johan and Ljung, Lennart , journal=. Nonlinear System Identification:. 2019 , volume=
work page 2019
- [65]
-
[66]
Lin, Tsair-Chuan and Wong, Kainam Thomas , title =. Signal Process. , month =. 2016 , publisher =
work page 2016
-
[67]
Voros, J. , journal=. Iterative algorithm for parameter identification of. 1999 , volume=
work page 1999
-
[68]
Gray-box identification of block-oriented nonlinear models , journal =. 2000 , author =
work page 2000
-
[69]
Mirri, D. and Luculano, G. and Filicori, F. and Pasini, G. and Vannini, G. and Gabriella, G.P. , journal=. A modified. 2002 , volume=
work page 2002
-
[70]
Glentis, G.-O.A. and Koukoulas, P. and Kalouptsidis, N. , journal=. Efficient algorithms for. 1999 , volume=
work page 1999
-
[71]
An identification algorithm for polynomial
Luigi Piroddi and William Spinelli , journal=. An identification algorithm for polynomial. 2003 , volume=
work page 2003
-
[72]
S. Chen, S. A. Billings and W. Luo , title =. International Journal of Control , volume =. 1989 , publisher =
work page 1989
-
[73]
Modeling and Identification of Nonlinear Systems:
Adeniran, Ahmed Adebowale and El Ferik, Sami , journal=. Modeling and Identification of Nonlinear Systems:. 2017 , volume=
work page 2017
-
[74]
Yassin and Mohd Nasir Taib and Ramli Adnan , year=
Ihsan M. Yassin and Mohd Nasir Taib and Ramli Adnan , year=. Recent Advancements & Methodologies in System Identification:. Scientific Research Journal , volume =
-
[75]
Nonlinear Black-Box Modeling in System Identification:
Sj\". Nonlinear Black-Box Modeling in System Identification:. Automatica , pages =. 1995 , volume =
work page 1995
- [76]
-
[77]
Hong, X. and Mitchell, R. J. and Chen, S. and Harris, C. J. and Li, K. and Irwin, G. W. , title =. International Journal of Systems Science , pages =. 2008 , volume =
work page 2008
-
[78]
Journal of Optimization Theory and Application , volume=
Minh Phan and Lucas Horta and Jer-Nan Juang and Richard Longman , title =. Journal of Optimization Theory and Application , volume=. 1993 , pages =
work page 1993
-
[79]
Juang, Jer-Nan and Pappa, Richard , year =. An Eigensystem Realization Algorithm for Modal Parameter Identification and Model Reduction , volume =
-
[80]
GPTIPS 2 : A n Open-Source Software Platform for Symbolic Data Mining
Searson, Dominic P. GPTIPS 2 : A n Open-Source Software Platform for Symbolic Data Mining. Handbook of Genetic Programming Applications. 2015
work page 2015
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.