Recognition: 2 theorem links
· Lean TheoremTowards Closed-loop Stability of Nonlinear Receding Horizon Games
Pith reviewed 2026-05-13 03:26 UTC · model grok-4.3
The pith
Receding horizon games for nonlinear systems achieve recursive feasibility and practical stability from the turnpike property without needing terminal ingredients.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
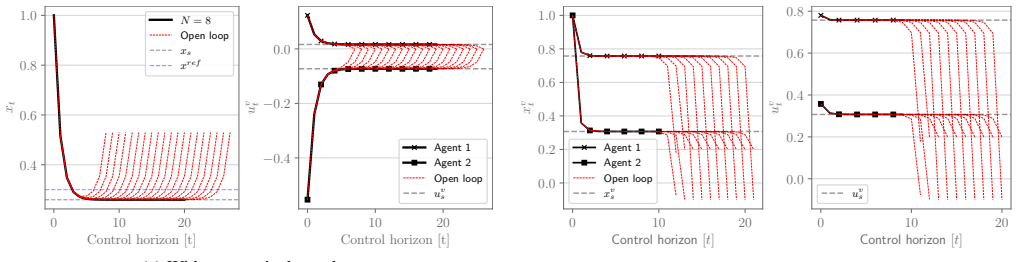
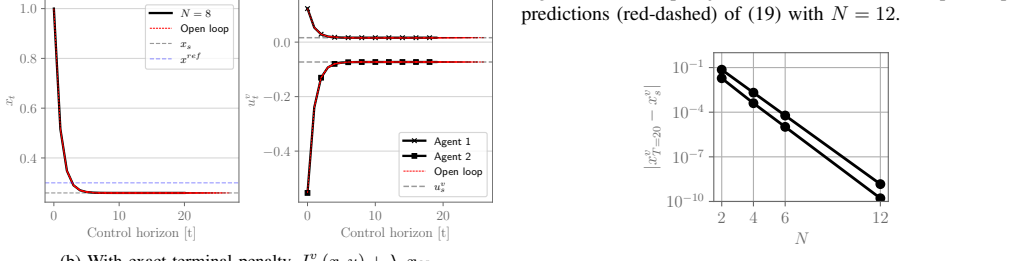
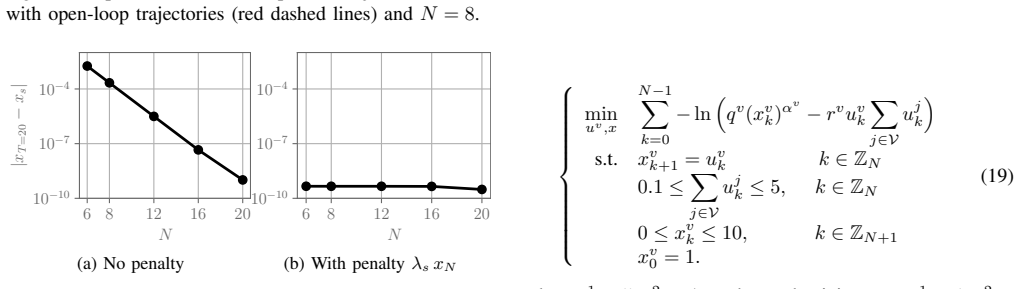
We show that recursive feasibility can be inferred from the turnpike phenomenon under mild assumptions. Moreover, we prove sufficient conditions for practical asymptotic convergence of the closed-loop trajectories, and we discuss how the gap towards practical asymptotic stability may be closed. Numerical examples illustrate that the closed-loop region of attraction around the steady-state GNE shrinks exponentially with the horizon length.
What carries the argument
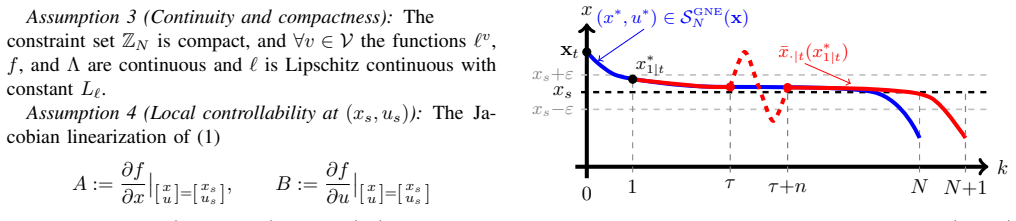
The turnpike phenomenon, where optimal trajectories remain close to the steady-state equilibrium for most of the horizon, which is used to infer recursive feasibility and stability without terminal ingredients.
If this is right
- Recursive feasibility holds without any terminal sets or costs.
- Closed-loop trajectories exhibit practical asymptotic convergence to the GNE.
- The basin of attraction decreases exponentially as the prediction horizon lengthens.
- A linear terminal penalty can ensure asymptotic rather than practical stability.
Where Pith is reading between the lines
- This approach could simplify the design of stable multi-agent control systems by avoiding the need for complex terminal constraints.
- It suggests that turnpike-based arguments might apply to other horizon-based game-theoretic control problems.
- Extending the linear penalty idea might provide a general way to bridge practical to asymptotic stability in similar settings.
Load-bearing premise
The turnpike phenomenon must hold for the nonlinear dynamics and cost functions under the given mild assumptions.
What would settle it
A numerical simulation or analytical example where the turnpike property is satisfied but the closed-loop system becomes infeasible or diverges from the GNE for some initial conditions.
Figures
read the original abstract
We analyze Receding Horizon Games without any MPC-like terminal ingredients. We show that recursive feasibility can be inferred from the turnpike phenomenon under mild assumptions. Moreover, we prove sufficient conditions for practical asymptotic convergence of the closed-loop trajectories, and we discuss how the gap towards practical asymptotic stability may be closed. We use numerical examples to show that the closed-loop region of attraction around the steady-state GNE shrinks exponentially with the horizon length, a behavior previously known only for model predictive control. Further, we apply a linear end penalty and demonstrate in numerical simulations that it suppresses the leaving arc and ensures asymptotic convergence to the steady-state GNE.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper analyzes receding horizon games for nonlinear dynamical systems without MPC-style terminal ingredients. It claims that recursive feasibility of the finite-horizon game can be inferred directly from the turnpike property under mild assumptions on the dynamics and stage costs. Sufficient conditions are derived for practical asymptotic convergence of the closed-loop trajectories to the steady-state generalized Nash equilibrium (GNE), with discussion of how the remaining gap to practical asymptotic stability can be closed. Numerical examples are used to demonstrate that the region of attraction around the steady-state GNE shrinks exponentially with the prediction horizon and that a linear end penalty suppresses the leaving arc and restores asymptotic convergence.
Significance. If the central claims hold, the work provides a terminal-ingredient-free stability framework for receding-horizon games that parallels existing MPC turnpike results, with concrete numerical evidence of exponential region-of-attraction shrinkage and the practical benefit of a linear end penalty. The explicit linkage of recursive feasibility to the turnpike phenomenon and the derivation of practical convergence conditions represent a useful extension of single-agent MPC theory to multi-agent settings.
major comments (2)
- [Abstract and main theoretical section] The central feasibility argument rests on the external turnpike property holding under the stated mild assumptions; however, the manuscript does not appear to contain an explicit verification or counter-example check that the turnpike property is indeed satisfied for the class of nonlinear dynamics and costs considered (see the abstract claim and the discussion following the main theorem).
- [Theoretical results section] The sufficient conditions for practical asymptotic convergence are stated to be proved in the manuscript, yet the provided abstract and structure do not include the explicit assumption list, error-bound derivations, or the precise statement of the convergence theorem that would allow verification of whether the practical-stability gap is rigorously characterized.
minor comments (2)
- Notation for the steady-state GNE and the leaving arc should be introduced earlier and used consistently throughout the numerical examples.
- The numerical examples would benefit from an explicit statement of the system dimensions, cost parameters, and horizon lengths used to generate the exponential-shrinkage plots.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed review of our manuscript. We address each major comment point by point below, providing clarifications from the paper and indicating the revisions we will make to improve clarity and verifiability.
read point-by-point responses
-
Referee: [Abstract and main theoretical section] The central feasibility argument rests on the external turnpike property holding under the stated mild assumptions; however, the manuscript does not appear to contain an explicit verification or counter-example check that the turnpike property is indeed satisfied for the class of nonlinear dynamics and costs considered (see the abstract claim and the discussion following the main theorem).
Authors: We thank the referee for highlighting this point. The manuscript invokes the external turnpike property under the mild assumptions on the nonlinear dynamics and stage costs (explicitly listed as Assumption 1 in Section II), from which recursive feasibility of the finite-horizon game is inferred directly, as shown in the proof of the main feasibility result (Theorem 1). The turnpike property itself is not re-proved from first principles but is taken as holding for the considered class, consistent with standard practice in turnpike-based MPC literature. To address the concern and make the argument more self-contained, we will add a short verification remark in the revised Section III, including a brief check that the assumptions are satisfied for the dynamics and costs in our numerical examples, along with a reference to a simple counter-example scenario where the assumptions would fail. revision: yes
-
Referee: [Theoretical results section] The sufficient conditions for practical asymptotic convergence are stated to be proved in the manuscript, yet the provided abstract and structure do not include the explicit assumption list, error-bound derivations, or the precise statement of the convergence theorem that would allow verification of whether the practical-stability gap is rigorously characterized.
Authors: The sufficient conditions for practical asymptotic convergence are indeed proved in the manuscript. The full assumption list appears in Section II, the error bounds are derived in the proof of the main convergence result (Theorem 2 in Section IV, with supporting lemmas in the appendix), and the theorem explicitly characterizes the practical asymptotic convergence to the steady-state GNE while discussing the remaining gap to asymptotic stability. The abstract summarizes these contributions at a high level for brevity. We agree that greater explicitness in the abstract and main structure would aid verification. In the revision, we will expand the abstract to briefly reference the key assumptions and Theorem 2, and we will add a pointer in the introduction to the precise location of the error-bound derivations and the discussion of the practical-stability gap. revision: yes
Circularity Check
No significant circularity; derivation relies on external turnpike results
full rationale
The central claims (recursive feasibility inferred from turnpike, sufficient conditions for practical asymptotic convergence) are derived from stated mild assumptions on dynamics and costs plus the turnpike phenomenon, which is invoked from prior literature rather than defined or fitted within the paper. No self-definitional steps, fitted inputs renamed as predictions, or load-bearing self-citations that reduce the result to its own inputs appear in the provided structure or abstract. Numerical examples serve as validation, not as the source of the feasibility or stability claims. The derivation chain remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The turnpike phenomenon holds under mild assumptions on the system dynamics and cost functions
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/ArrowOfTime.lean; Cost/FunctionalEquation.lean; economic MPC modulesStrict dissipativity ⇒ turnpike (Thm. 1); reality_from_one_distinction forcing J-cost stability echoesWe show that recursive feasibility can be inferred from the turnpike phenomenon under mild assumptions... strict dissipativity... storage function Λ... W(x):=V*_N(x)+Λ(x)... practical asymptotic convergence
-
IndisputableMonolith/Cost/FunctionalEquation.leanJ-cost dissipativity and turnpike forcing matchesturnpike property... Λ(f(x*_k,u*_k))−Λ(x*_k)≤−α_ℓ(‖x*_k−xs,u*_k−us‖)+s(x*_k,u*_k)
Reference graph
Works this paper leans on
-
[1]
Reced- ing horizon games for modeling competitive supply chains,
S. Hall, L. Guerrini, F. D ¨orfler, and D. Liao-McPherson, “Reced- ing horizon games for modeling competitive supply chains,”IFAC- PapersOnLine, vol. 58, no. 18, pp. 8–14, 2024
work page 2024
-
[2]
A differential game approach to formation control,
D. Gu, “A differential game approach to formation control,”IEEE Trans. Control Syst. Technol., vol. 16, no. 1, pp. 85–93, Jan. 2008
work page 2008
-
[3]
A noncooperative game approach to au- tonomous racing,
A. Liniger and J. Lygeros, “A noncooperative game approach to au- tonomous racing,”IEEE Transactions on Control Systems Technology, vol. 28, no. 3, pp. 884–897, May 2020
work page 2020
-
[4]
Game- theoretic planning for self-driving cars in multivehicle competitive scenarios,
M. Wang, Z. Wang, J. Talbot, J. C. Gerdes, and M. Schwager, “Game- theoretic planning for self-driving cars in multivehicle competitive scenarios,”IEEE Transactions on Robotics, pp. 1–13, 2021
work page 2021
-
[5]
Algames: a fast augmented lagrangian solver for constrained dynamic games,
S. Le Cleac’h, M. Schwager, and Z. Manchester, “Algames: a fast augmented lagrangian solver for constrained dynamic games,” Autonomous Robots, vol. 46, no. 1, pp. 201–215, 2022. [Online]. Available: https://doi.org/10.1007/s10514-021-10024-7
-
[6]
N. Mignoni, R. Carli, and M. Dotoli, “Distributed noncooperative mpc for energy scheduling of charging and trading electric vehicles in energy communities,”IEEE Transactions on Control Systems Tech- nology, 2023
work page 2023
-
[7]
Distributed coordina- tion of price-responsive electric loads: A receding horizon approach,
A. D. Paola, F. Fele, D. Angeli, and G. Strbac, “Distributed coordina- tion of price-responsive electric loads: A receding horizon approach,” in2018 IEEE Conference on Decision and Control (CDC). IEEE, dec 2018
work page 2018
-
[8]
Receding horizon games with coupling constraints for demand-side manage- ment,
S. Hall, G. Belgioioso, D. Liao-McPherson, and F. D ¨orfler, “Receding horizon games with coupling constraints for demand-side manage- ment,” in2022 IEEE 61st Conference on Decision and Control (CDC), 2022, pp. 3795–3800
work page 2022
-
[9]
Generalized nash equilibrium problems,
F. Facchinei and C. Kanzow, “Generalized nash equilibrium problems,” Annals of Operations Research, vol. 175, no. 1, pp. 177–211, Nov. 2009
work page 2009
-
[10]
Nash equilibria: the variational approach,
F. Facchinei and J. Pang, “Nash equilibria: the variational approach,” inConvex Optimization in Signal Processing and Communications, D. P. Palomar and Y . C. Eldar, Eds. Cambridge University Press, dec 2009, ch. 12, pp. 443–493
work page 2009
-
[11]
On the variational equilibrium as a refinement of the generalized Nash equilibrium,
A. A. Kulkarni and U. V . Shanbhag, “On the variational equilibrium as a refinement of the generalized Nash equilibrium,”Automatica, vol. 48, no. 1, pp. 45–55, 2012
work page 2012
-
[12]
Demand-side management via distributed energy generation and storage optimization,
I. Atzeni, L. G. Ord ´o˜nez, G. Scutari, D. P. Palomar, and J. R. Fonol- losa, “Demand-side management via distributed energy generation and storage optimization,”IEEE Transactions on Smart Grid, vol. 4, no. 2, pp. 866–876, Jun. 2013
work page 2013
-
[13]
Optimal selection and tracking of generalized nash equilibria in monotone games,
E. Benenati, W. Ananduta, and S. Grammatico, “Optimal selection and tracking of generalized nash equilibria in monotone games,”IEEE Transactions on Automatic Control, vol. 68, no. 12, pp. 7644–7659, 2023
work page 2023
-
[14]
Dissipative dynamical systems part i: General theory,
J. Willems, “Dissipative dynamical systems part i: General theory,” Archive for Rational Mechanics and Analysis, vol. 45, no. 5, pp. 321– 351, 1972
work page 1972
-
[15]
L. McKenzie, “Turnpike theory,”Econometrica: Journal of the Econo- metric Society, vol. 44, no. 5, pp. 841–865, 1976
work page 1976
-
[16]
Turnpike properties in optimal control: An overview of discrete-time and continuous-time results,
T. Faulwasser and L. Gr ¨une, “Turnpike properties in optimal control: An overview of discrete-time and continuous-time results,”Handbook of numerical analysis, vol. 23, pp. 367–400, 2022
work page 2022
-
[17]
Economic receding horizon control without terminal con- straints,
L. Gr ¨une, “Economic receding horizon control without terminal con- straints,”Automatica, vol. 49, no. 3, pp. 725–734, mar 2013
work page 2013
-
[18]
A Lyapunov Function for Economic Optimizing Model Predictive Control,
M. Diehl, R. Amrit, and J. B. Rawlings, “A Lyapunov Function for Economic Optimizing Model Predictive Control,”IEEE Transactions on Automatic Control, vol. 56, no. 3, pp. 703–707, Mar. 2011
work page 2011
-
[19]
On average performance and stability of economic model predictive control,
D. Angeli, R. Amrit, and J. B. Rawlings, “On average performance and stability of economic model predictive control,”IEEE Transactions on Automatic Control, vol. 57, no. 7, pp. 1615–1626, 2012
work page 2012
-
[20]
Economic nonlinear model predictive control,
T. Faulwasser, L. Gr ¨une, M. A. M ¨ulleret al., “Economic nonlinear model predictive control,”Foundations and Trends® in Systems and Control, vol. 5, no. 1, pp. 1–98, 2018
work page 2018
-
[21]
On the relation between strict dissipa- tivity and turnpike properties,
L. Gr ¨une and M. A. M ¨uller, “On the relation between strict dissipa- tivity and turnpike properties,”Systems & Control Letters, vol. 90, pp. 45–53, Apr. 2016
work page 2016
-
[22]
On turnpike and dissipativity properties of continuous-time optimal control problems,
T. Faulwasser, M. Korda, C. Jones, and D. Bonvin, “On turnpike and dissipativity properties of continuous-time optimal control problems,” Automatica, vol. 81, pp. 297–304, 2017
work page 2017
-
[23]
Turnpike properties of capital accumula- tion games,
C. Fershtman and E. Muller, “Turnpike properties of capital accumula- tion games,”Journal of Economic Theory, vol. 38, no. 1, pp. 167–177, Feb. 1986
work page 1986
-
[24]
D. Carlson and A. Haurie,A Turnpike Theory for Infinite Horizon Open-Loop Differential Games with Decoupled Controls. Birkh ¨auser Boston, 1995, pp. 353–376
work page 1995
-
[25]
A turnpike theory for infinite-horizon open-loop competitive processes,
——, “A turnpike theory for infinite-horizon open-loop competitive processes,”SIAM Journal on Control and Optimization, vol. 34, no. 4, pp. 1405–1419, Jul. 1996
work page 1996
-
[26]
D. A. Carlson and A. B. Haurie,Infinite Horizon Dynamic Games with Coupled State Constraints. Birkh ¨auser Boston, 2000, pp. 195–212
work page 2000
-
[27]
X. Li, F. Wu, and X. Zhang, “Turnpike properties for zero-sum stochastic linear quadratic differential games of markovian regime switching system,” Sep. 2025
work page 2025
-
[28]
Turnpike properties in linear quadratic gaussian n-player differential games,
A. Cohen and J. Jian, “Turnpike properties in linear quadratic gaussian n-player differential games,” Jul. 2025
work page 2025
-
[29]
Long time behavior and turnpike solu- tions in mildly non-monotone mean field games,
M. Cirant and A. Porretta, “Long time behavior and turnpike solu- tions in mildly non-monotone mean field games,”ESAIM: Control, Optimisation and Calculus of Variations, vol. 27, p. 86, 2021
work page 2021
-
[30]
Leveraging the turnpike effect for mean field games numerics,
R. A. Carmona and C. Zeng, “Leveraging the turnpike effect for mean field games numerics,”IEEE Open Journal of Control Systems, vol. 3, pp. 389–404, 2024
work page 2024
-
[31]
Long time behaviour of mean field games with fractional diffusion,
O. Ersland, E. R. Jakobsen, and A. Porretta, “Long time behaviour of mean field games with fractional diffusion,” May 2025
work page 2025
-
[32]
F. A. Fedorov, “Studying the well-posedness of the boundary value problem for a system of riccati type equations based on the concept of mean field games,”Moscow University Computational Mathematics and Cybernetics, vol. 49, no. 2, pp. 150–164, Jun. 2025
work page 2025
-
[33]
S. Hall, F. D ¨orfler, and T. Faulwasser, “System-theoretic analysis of dynamic generalized nash equilibrium problems – turnpikes and dissipativity,” Oct. 2025
work page 2025
-
[34]
Stability certificates for receding horizon games,
S. Hall, G. Belgioioso, F. D ¨orfler, and D. Liao-McPherson, “Stability certificates for receding horizon games,”IEEE Transactions on Auto- matic Control, pp. 1–8, 2025
work page 2025
-
[35]
Linear-quadratic dynamic games as receding-horizon variational inequalities,
E. Benenati and S. Grammatico, “Linear-quadratic dynamic games as receding-horizon variational inequalities,”IEEE Transactions on Automatic Control, pp. 1–16, 2025
work page 2025
-
[36]
A compendium of comparison function results,
C. Kellett, “A compendium of comparison function results,”Mathe- matics of Control, Signals, and Systems, vol. 26, no. 3, pp. 339–374, 2014
work page 2014
-
[37]
S. Hall, F. D ¨orfler, H. H. Nax, and S. Bolognani, “The limits of “fairness” of the variational generalized nash equilibrium,” in2025 IEEE 64th Conference on Decision and Control (CDC), 2025, pp. 5354–5360
work page 2025
-
[38]
S. Hall and A. Bemporad, “Solving multiparametric generalized nash equilibrium problems and explicit game-theoretic model predictive control,” 2025
work page 2025
-
[39]
On the design of economic NMPC based on approximate turnpike properties,
T. Faulwasser and D. Bonvin, “On the design of economic NMPC based on approximate turnpike properties,” inProc. of 54th IEEE Conference on Decision and Control, Osaka, Japan, December 15-18 2015, pp. 4964 – 4970
work page 2015
-
[40]
D. Liao-McPherson, M. Huang, and I. Kolmanovsky, “A regularized and smoothed fischer–burmeister method for quadratic programming with applications to model predictive control,”IEEE Transactions on Automatic Control, vol. 64, no. 7, pp. 2937–2944, Jul. 2019
work page 2019
-
[41]
Asymptotic stability and transient optimality of economic MPC without terminal conditions,
L. Gr ¨une and M. Stieler, “Asymptotic stability and transient optimality of economic MPC without terminal conditions,”Journal of Process Control, vol. 24, no. 8, pp. 1187–1196, aug 2014
work page 2014
-
[42]
NashOpt-a Python library for computing generalized Nash equilibria,
A. Bemporad, “NashOpt: A Python library for computing generalized Nash equilibria and game design,”arXiv preprint 2512.23636, 2025, https://github.com/bemporad/nashopt
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.