Recognition: 2 theorem links
· Lean TheoremThink Twice, Act Once: Verifier-Guided Action Selection For Embodied Agents
Pith reviewed 2026-05-14 21:00 UTC · model grok-4.3
The pith
A test-time verifier trained on synthesized failures helps MLLM agents pick reliable actions from multiple candidates.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
VeGAS is a test-time framework that samples an ensemble of candidate actions from an MLLM-based embodied agent and uses a generative verifier, trained on LLM-synthesized failure cases, to select the most reliable action without altering the base policy, yielding up to 36 percent relative improvement over strong CoT baselines on challenging multi-object long-horizon tasks in Habitat and ALFRED.
What carries the argument
Generative verifier trained on an LLM-driven curriculum of synthesized failure cases that ranks sampled candidate actions for reliability.
If this is right
- Consistent gains on multi-object long-horizon tasks in Habitat and ALFRED environments.
- Up to 36 percent relative improvement over chain-of-thought baselines on the hardest cases.
- No need to retrain or modify the underlying MLLM policy.
- Explicit verification step addresses brittleness in out-of-distribution scenarios.
Where Pith is reading between the lines
- The same sampling-plus-verifier pattern could be applied to other decision-making settings where base models produce varied outputs.
- Synthetic failure data may lower the cost of building robust agents compared with collecting real error traces.
- Test-time verification offers a way to improve agents without scaling up the original training compute.
Load-bearing premise
A verifier trained only on automatically generated failure examples will still recognize good actions when the base model encounters truly novel real-world errors.
What would settle it
Performance on a held-out embodied benchmark with new object interactions and failure modes not present in the synthesized training data shows no gain over the CoT baseline.
Figures









read the original abstract
Building generalist embodied agents capable of solving complex real-world tasks remains a fundamental challenge in AI. Multimodal Large Language Models (MLLMs) have significantly advanced the reasoning capabilities of such agents through strong vision-language knowledge and chain-of-thought (CoT) reasoning, yet remain brittle when faced with challenging out-of-distribution scenarios. To address this, we propose Verifier-Guided Action Selection (VegAS), a test-time framework designed to improve the robustness of MLLM-based embodied agents through an explicit verification step. At inference time, rather than committing to a single decoded action, VeGAS samples an ensemble of candidate actions and uses a generative verifier to identify the most reliable choice, without modifying the underlying policy. Crucially, we find that using an MLLM off-the-shelf as a verifier yields no improvement, motivating our LLM-driven data synthesis strategy, which automatically constructs a diverse curriculum of failure cases to expose the verifier to a rich distribution of potential errors at training time. Across embodied reasoning benchmarks spanning the Habitat and ALFRED environments, VeGAS consistently improves generalization, achieving up to a 36% relative performance gain over strong CoT baselines on the most challenging multi-object, long-horizon tasks.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces Verifier-Guided Action Selection (VeGAS), a test-time framework for MLLM-based embodied agents. Rather than committing to a single CoT-decoded action, the method samples an ensemble of candidate actions and employs a generative verifier—trained exclusively on LLM-synthesized failure cases—to rank and select the most reliable action without modifying the underlying policy. Evaluations on Habitat and ALFRED benchmarks report consistent gains, with up to 36% relative improvement over strong CoT baselines on the most challenging multi-object, long-horizon tasks.
Significance. If the empirical results hold under rigorous controls, the work would offer a practical contribution to robust embodied reasoning by showing that test-time verification with synthetic curricula can mitigate OOD brittleness in MLLM agents. The separation of policy and verifier, together with the emphasis on automatically generated training data, provides a scalable template that could be adopted in other agentic settings where full retraining is costly.
major comments (2)
- [Abstract] Abstract: the headline claim of a 36% relative gain on multi-object long-horizon tasks is presented without accompanying statistical significance tests, run-to-run variance, exact baseline configurations, or ablation controls that isolate the verifier’s contribution from simple ensemble sampling effects.
- [Method] Method section (data synthesis paragraph): the central assumption that LLM-synthesized failure cases produce a verifier capable of identifying correct actions on real OOD errors is load-bearing for the generalization claim, yet no quantitative analysis or coverage metrics are supplied to show that the synthetic error distribution matches the actual failure modes observed in Habitat and ALFRED.
minor comments (2)
- [Method] The notation for the verifier scoring function should be introduced with an explicit equation rather than inline prose to improve readability.
- [Experiments] Table captions would benefit from explicit statements of the number of evaluation episodes and random seeds used for each environment.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. The comments highlight important aspects of statistical rigor and validation of our data synthesis approach. We address each point below and will revise the manuscript to strengthen these elements.
read point-by-point responses
-
Referee: [Abstract] Abstract: the headline claim of a 36% relative gain on multi-object long-horizon tasks is presented without accompanying statistical significance tests, run-to-run variance, exact baseline configurations, or ablation controls that isolate the verifier’s contribution from simple ensemble sampling effects.
Authors: We agree that the abstract claim would benefit from supporting statistical details. In the revised version, we will report run-to-run variance across multiple random seeds, include statistical significance tests (e.g., paired t-tests against baselines), explicitly specify the exact baseline configurations (including prompt templates and decoding parameters), and add ablation studies that compare full VeGAS against ensemble sampling without the verifier. These results will be summarized in the abstract and detailed in the Experiments section. revision: yes
-
Referee: [Method] Method section (data synthesis paragraph): the central assumption that LLM-synthesized failure cases produce a verifier capable of identifying correct actions on real OOD errors is load-bearing for the generalization claim, yet no quantitative analysis or coverage metrics are supplied to show that the synthetic error distribution matches the actual failure modes observed in Habitat and ALFRED.
Authors: We acknowledge that quantitative validation of the synthetic error distribution against real failures would better support the generalization argument. Our empirical gains on the target benchmarks provide indirect evidence, but we did not include explicit coverage metrics or distributional comparisons in the original submission. In revision, we will expand the data synthesis section with additional analysis, including categorized examples of synthetic versus observed failures and any feasible quantitative metrics (such as error-type histograms) to characterize the match. revision: yes
Circularity Check
No circularity: empirical test-time method with external benchmark validation
full rationale
The paper describes VeGAS as a test-time sampling and verification procedure for MLLM-based agents. Performance gains (up to 36% relative) are measured directly on external embodied benchmarks (Habitat, ALFRED) rather than derived from internal equations or fitted parameters. No self-definitional loops, fitted-input predictions, or load-bearing self-citations appear in the derivation chain; the verifier training uses synthesized data but its effectiveness is evaluated out-of-distribution on held-out tasks. The approach is self-contained against external benchmarks with no reduction of claims to inputs by construction.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Off-the-shelf MLLMs are insufficient as verifiers but can be improved via targeted training on failure cases
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclearVeGAS samples an ensemble of candidate actions and uses a generative verifier to identify the most reliable choice... LLM-driven data synthesis strategy, which automatically constructs a diverse curriculum of failure cases
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclearusing an MLLM off-the-shelf as a verifier yields no improvement, motivating our LLM-driven data synthesis strategy
Reference graph
Works this paper leans on
-
[1]
Do As I Can, Not As I Say: Grounding Language in Robotic Affordances
Michael Ahn, Anthony Brohan, Noah Brown, Yevgen Chebo- tar, Omar Cortes, Byron David, Chelsea Finn, Chuyuan Fu, Keerthana Gopalakrishnan, Karol Hausman, et al. Do as i can, not as i say: Grounding language in robotic affordances. arXiv preprint arXiv:2204.01691, 2022. 1
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[2]
Critique-out-loud re- ward models.arXiv preprint arXiv:2408.11791, 2024
Zachary Ankner, Mansheej Paul, Brandon Cui, Jonathan D Chang, and Prithviraj Ammanabrolu. Critique-out-loud re- ward models.arXiv preprint arXiv:2408.11791, 2024. 2, 3
-
[3]
Shuai Bai, Shusheng Yang, Shixi Wang, Changzhi Sun, Zheng Gong, Yu Yang, Yuhao Qian, Xiaoteng Ren, Zhiyang Wei, Zhuo Su, et al. Qwen2.5-vl: A state-of-the-art vision- language model series.arXiv preprint arXiv:2502.13923,
work page internal anchor Pith review Pith/arXiv arXiv
-
[4]
Large Language Monkeys: Scaling Inference Compute with Repeated Sampling
Bradley Brown, Jordan Juravsky, Ryan Ehrlich, Ronald Clark, Quoc V Le, Christopher R ´e, and Azalia Mirhoseini. Large language monkeys: Scaling inference compute with repeated sampling.arXiv preprint arXiv:2407.21787, 2024. 2, 6
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[5]
Training Verifiers to Solve Math Word Problems
Karl Cobbe, Vineet Kosaraju, Mohammad Bavarian, Mark Chen, Heewoo Jun, Lukasz Kaiser, Matthias Plappert, Jerry Tworek, Jacob Hilton, Reiichiro Nakano, et al. Training verifiers to solve math word problems.arXiv preprint arXiv:2110.14168, 2021. 2, 4
work page internal anchor Pith review Pith/arXiv arXiv 2021
-
[6]
RoboTHOR: An Open Simulation-to-Real Embodied AI Platform
Matt Deitke, Winson Han, Alvaro Herrasti, Aniruddha Kemb- havi, Eric Kolve, Roozbeh Mottaghi, Jordi Salvador, Dustin Schwenk, Eli VanderBilt, Matthew Wallingford, Luca Weihs, Mark Yatskar, and Ali Farhadi. RoboTHOR: An Open Simulation-to-Real Embodied AI Platform. InCVPR, 2020. 3
2020
-
[7]
Proc- THOR: Large-Scale Embodied AI Using Procedural Genera- tion
Matt Deitke, Eli VanderBilt, Alvaro Herrasti, Luca Weihs, Jordi Salvador, Kiana Ehsani, Winson Han, Eric Kolve, Ali Farhadi, Aniruddha Kembhavi, and Roozbeh Mottaghi. Proc- THOR: Large-Scale Embodied AI Using Procedural Genera- tion. InNeurIPS, 2022. Outstanding Paper Award. 3
2022
-
[8]
Task and motion planning with large language models for object rearrangement
Yan Ding, Xiaohan Zhang, Chris Paxton, and Shiqi Zhang. Task and motion planning with large language models for object rearrangement. InIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023. 1
2023
-
[9]
cat-shaped mug
Vishnu Sashank Dorbala, James F Mullen, and Dinesh Manocha. Can an embodied agent find your “cat-shaped mug”? llm-based zero-shot object navigation.IEEE Robotics and Automation Letters, 2023. 2
2023
-
[10]
Embspatial-bench: Benchmarking spatial un- derstanding for embodied tasks with large vision-language models
Mengfei Du, Binhao Wu, Zejun Li, Xuan-Jing Huang, and Zhongyu Wei. Embspatial-bench: Benchmarking spatial un- derstanding for embodied tasks with large vision-language models. InAnnual Meeting of the Association for Computa- tional Linguistics (Short Papers), 2024. 2
2024
-
[11]
Guiding pretraining in reinforcement learning with large language models
Yuqing Du, Olivia Watkins, Zihan Wang, C ´edric Colas, Trevor Darrell, Pieter Abbeel, Abhishek Gupta, and Jacob Andreas. Guiding pretraining in reinforcement learning with large language models. InInternational Conference on Ma- chine Learning (ICML), 2023. 2
2023
-
[12]
ManipulaTHOR: A Framework for Visual Object Manipulation
Kiana Ehsani, Winson Han, Alvaro Herrasti, Eli VanderBilt, Luca Weihs, Eric Kolve, Aniruddha Kembhavi, and Roozbeh Mottaghi. ManipulaTHOR: A Framework for Visual Object Manipulation. InCVPR, 2021. 3
2021
-
[13]
Learning from trials and errors: Reflective test-time planning for embodied llms, 2026
Yining Hong, Huang Huang, Manling Li, Li Fei-Fei Li, Ji- ajun Wu, and Yejin Choi. Learning from trials and errors: Reflective test-time planning for embodied llms, 2026. 3
2026
-
[14]
Esca: Contextualizing embodied agents via scene-graph generation.arXiv preprint arXiv:2510.15963,
Jiani Huang, Amish Sethi, Matthew Kuo, Mayank Keoliya, Neelay Velingker, JungHo Jung, Ser-Nam Lim, Ziyang Li, and Mayur Naik. Esca: Contextualizing embodied agents via scene-graph generation.arXiv preprint arXiv:2510.15963,
-
[15]
Language models as zero-shot planners: Extracting actionable knowledge for embodied agents
Wenlong Huang, Pieter Abbeel, Deepak Pathak, and Igor Mor- datch. Language models as zero-shot planners: Extracting actionable knowledge for embodied agents. InInternational conference on machine learning, pages 9118–9147. PMLR,
-
[16]
Housekeep: Tidying virtual households using commonsense reasoning
Yash Kant, Arun Ramachandran, Sriram Yenamandra, Igor Gilitschenski, Dhruv Batra, Andrew Szot, and Harsh Agrawal. Housekeep: Tidying virtual households using commonsense reasoning. InEuropean Conference on Computer Vision, pages 355–373. Springer, 2022. 3
2022
-
[17]
AI2-THOR: An Interactive 3D Environment for Visual AI
Eric Kolve, Roozbeh Mottaghi, Winson Han, Eli VanderBilt, Luca Weihs, Alvaro Herrasti, Matt Deitke, Kiana Ehsani, Daniel Gordon, Yuke Zhu, et al. Ai2-thor: An interactive 3d environment for visual ai.arXiv preprint arXiv:1712.05474,
work page internal anchor Pith review Pith/arXiv arXiv
-
[18]
Jacky Kwok, Christopher Agia, Rohan Sinha, Matt Fout- ter, Shulu Li, Ion Stoica, Azalia Mirhoseini, and Marco Pavone. Robomonkey: Scaling test-time sampling and ver- ification for vision-language-action models.arXiv preprint arXiv:2506.17811, 2025. 3
-
[19]
Behavior-1k: A benchmark for embodied ai with 1,000 ev- eryday activities and realistic simulation
Chengshu Li, Ruohan Zhang, Josiah Wong, Cem Gokmen, Sanjana Srivastava, Roberto Mart ´ın-Mart´ın, Chen Wang, Gabrael Levine, Michael Lingelbach, Jiankai Sun, et al. Behavior-1k: A benchmark for embodied ai with 1,000 ev- eryday activities and realistic simulation. InConference on Robot Learning, pages 80–93. PMLR, 2023. 3
2023
-
[20]
Embodied agent interface: Bench- marking llms for embodied decision making.Advances in Neural Information Processing Systems (NeurIPS), 2024
Manling Li, Shiyu Zhao, Qineng Wang, Kangrui Wang, Yu Zhou, Sanjana Srivastava, Cem Gokmen, Tony Lee, Erran Li Li, Ruohan Zhang, et al. Embodied agent interface: Bench- marking llms for embodied decision making.Advances in Neural Information Processing Systems (NeurIPS), 2024. 2
2024
-
[21]
Pre-trained language models for interactive decision-making.Advances in Neural Information Processing Systems, 35:31199–31212, 2022
Shuang Li, Xavier Puig, Chris Paxton, Yilun Du, Clinton Wang, Linxi Fan, Tao Chen, De-An Huang, Ekin Aky ¨urek, Anima Anandkumar, et al. Pre-trained language models for interactive decision-making.Advances in Neural Information Processing Systems, 35:31199–31212, 2022. 2
2022
-
[22]
Llm-enhanced scene graph learning for household rearrangement
Wenhao Li, Zhiyuan Yu, Qijin She, Zhinan Yu, Yuqing Lan, Chenyang Zhu, Ruizhen Hu, and Kai Xu. Llm-enhanced scene graph learning for household rearrangement. InSIG- GRAPH Asia 2024, 2024. 1
2024
-
[23]
Gonzalez, Ion Stoica, and Tuo Zhao
Zhuohan Li, Eric Jin, Xiang Li, Haotian Luo, Minjia Zhang, Mohammad Shoeybi, Tianyu Du, Shouhan Wang, Jimeng Sun, Shoumeng Yan, Zeming Yu, Xin He, Yiming Wang, Michael Wiseman, Amr Ahmed, Mu Li, Ce Zhang, Joseph E. Gonzalez, Ion Stoica, and Tuo Zhao. vllm: Easy, fast, and cheap llm inference. InProceedings of Neural Information Processing Systems (NeurIPS...
2023
-
[24]
Navcot: Boosting llm-based vision-and-language navigation via learning disentangled reasoning.IEEE Trans- actions on Pattern Analysis and Machine Intelligence, 2025
Bingqian Lin, Yunshuang Nie, Ziming Wei, Jiaqi Chen, Shikui Ma, Jianhua Han, Hang Xu, Xiaojun Chang, and Xiao- dan Liang. Navcot: Boosting llm-based vision-and-language navigation via learning disentangled reasoning.IEEE Trans- actions on Pattern Analysis and Machine Intelligence, 2025. 2
2025
-
[25]
arXiv preprint arXiv:2411.04679 , year=
Jie Liu, Pan Zhou, Yingjun Du, Ah-Hwee Tan, Cees GM Snoek, Jan-Jakob Sonke, and Efstratios Gavves. Capo: Coop- erative plan optimization for efficient embodied multi-agent cooperation.arXiv preprint arXiv:2411.04679, 2024. 2
-
[26]
Thinkbot: Embodied instruction following with thought chain reasoning
Guanxing Lu, Ziwei Wang, Changliu Liu, Jiwen Lu, and Yansong Tang. Thinkbot: Embodied instruction following with thought chain reasoning. InInternational Conference on Learning Representations (ICLR), 2025. 2
2025
-
[27]
Habitat: A Platform for Embodied AI Research
Manolis Savva*, Abhishek Kadian*, Oleksandr Maksymets*, Yili Zhao, Erik Wijmans, Bhavana Jain, Julian Straub, Jia Liu, Vladlen Koltun, Jitendra Malik, Devi Parikh, and Dhruv Batra. Habitat: A Platform for Embodied AI Research. InIEEE/CVF International Conference on Computer Vision (ICCV), 2019. 3
2019
-
[28]
Embodiedgpt: Vision-language pre-training via embodied chain of thought.Advances in Neural Information Processing Systems (NeurIPS), 2023
Yao Mu, Qinglong Zhang, Mengkang Hu, Wenhai Wang, Mingyu Ding, Jun Jin, Bin Wang, Jifeng Dai, Yu Qiao, and Ping Luo. Embodiedgpt: Vision-language pre-training via embodied chain of thought.Advances in Neural Information Processing Systems (NeurIPS), 2023. 2, 4
2023
-
[29]
Teach: Task-driven embodied agents that chat
Aishwarya Padmakumar, Jesse Thomason, Ayush Shrivastava, Patrick Lange, Anjali Narayan-Chen, Spandana Gella, Robin- son Piramuthu, Gokhan Tur, and Dilek Hakkani-Tur. Teach: Task-driven embodied agents that chat. InProceedings of the AAAI Conference on Artificial Intelligence, pages 2017–2025,
2017
-
[30]
Habitat 3.0: A co-habitat for humans, avatars, and robots
Xavier Puig, Eric Undersander, Andrew Szot, Mikael Dallaire Cote, Tsung-Yen Yang, Ruslan Partsey, Ruta Desai, Alexan- der Clegg, Michal Hlavac, So Yeon Min, et al. Habitat 3.0: A co-habitat for humans, avatars, and robots. InInternational Conference on Learning Representations (ICLR), 2024. 3
2024
-
[31]
Open-nav: Explor- ing zero-shot vision-and-language navigation in continuous environment with open-source llms
Yanyuan Qiao, Wenqi Lyu, Hui Wang, Zixu Wang, Zerui Li, Yuan Zhang, Mingkui Tan, and Qi Wu. Open-nav: Explor- ing zero-shot vision-and-language navigation in continuous environment with open-source llms. InIEEE International Conference on Robotics and Automation (ICRA), 2025. 1, 2
2025
-
[32]
Open-ended instructable embodied agents with memory-augmented large language models
Gabriel Sarch, Yue Wu, Michael Tarr, and Katerina Fragki- adaki. Open-ended instructable embodied agents with memory-augmented large language models. InACL Confer- ence on Empirical Methods in Natural Language Processing (EMNLP), 2023. 1, 2
2023
-
[33]
Velma: Verbalization embodiment of llm agents for vision and language navigation in street view
Raphael Schumann, Wanrong Zhu, Weixi Feng, Tsu-Jui Fu, Stefan Riezler, and William Yang Wang. Velma: Verbalization embodiment of llm agents for vision and language navigation in street view. InAAAI Conference on Artificial Intelligence,
-
[34]
Alfred: A benchmark for interpreting grounded instructions for everyday tasks
Mohit Shridhar, Jesse Thomason, Daniel Gordon, Yonatan Bisk, Winson Han, Roozbeh Mottaghi, Luke Zettlemoyer, and Dieter Fox. Alfred: A benchmark for interpreting grounded instructions for everyday tasks. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 10740–10749, 2020. 2, 3, 5, 1
2020
-
[35]
Alfworld: Aligning text and embodied environments for interactive learning
Mohit Shridhar, Xingdi Yuan, Marc-Alexandre Cote, Yonatan Bisk, Adam Trischler, and Matthew Hausknecht. Alfworld: Aligning text and embodied environments for interactive learning. InInternational Conference on Learning Repre- sentations (ICLR), 2021. 3
2021
-
[36]
Progprompt: Generating situated robot task plans using large language models
Ishika Singh, Valts Blukis, Arsalan Mousavian, Ankit Goyal, Danfei Xu, Jonathan Tremblay, Dieter Fox, Jesse Thomason, and Animesh Garg. Progprompt: Generating situated robot task plans using large language models. InIEEE International Conference on Robotics and Automation (ICRA), 2023. 1, 2
2023
-
[37]
When to solve, when to verify: Compute-optimal problem solving and generative verification for llm reasoning
Nishad Singhi, Hritik Bansal, Arian Hosseini, Aditya Grover, Kai-Wei Chang, Marcus Rohrbach, and Anna Rohrbach. When to solve, when to verify: Compute-optimal problem solving and generative verification for llm reasoning. InCon- ference on Language Modelling (COLM), 2025. 3, 6
2025
-
[38]
Scaling LLM Test-Time Compute Optimally can be More Effective than Scaling Model Parameters
Charlie Snell, Jaehoon Lee, Kelvin Xu, and Aviral Ku- mar. Scaling llm test-time compute optimally can be more effective than scaling model parameters.arXiv preprint arXiv:2408.03314, 2024. 2
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[39]
Llm-planner: Few-shot grounded planning for embodied agents with large language models
Chan Hee Song, Jiaman Wu, Clayton Washington, Brian M Sadler, Wei-Lun Chao, and Yu Su. Llm-planner: Few-shot grounded planning for embodied agents with large language models. InIEEE/CVF International Conference on Computer Vision (ICCV), 2023. 1, 2
2023
-
[40]
Adaplanner: Adaptive planning from feedback with language models.Advances in Neural Information Pro- cessing Systems (NeurIPS), 2023
Haotian Sun, Yuchen Zhuang, Lingkai Kong, Bo Dai, and Chao Zhang. Adaplanner: Adaptive planning from feedback with language models.Advances in Neural Information Pro- cessing Systems (NeurIPS), 2023. 2
2023
-
[41]
Linzhuang Sun, Hao Liang, Jingxuan Wei, Bihui Yu, Tian- peng Li, Fan Yang, Zenan Zhou, and Wentao Zhang. Mm- verify: Enhancing multimodal reasoning with chain-of- thought verification.arXiv preprint arXiv:2502.13383, 2025. 3
-
[42]
Emma-x: An embodied multimodal action model with grounded chain of thought and look-ahead spatial reasoning
Qi Sun, Pengfei Hong, Tej Deep Pala, Vernon Toh, U-Xuan Tan, Deepanway Ghosal, and Soujanya Poria. Emma-x: An embodied multimodal action model with grounded chain of thought and look-ahead spatial reasoning. InAnnual Meeting of the Association for Computational Linguistics (ACL), 2025. 2
2025
-
[43]
Habitat 2.0: Training home assistants to rearrange their habitat
Andrew Szot, Alex Clegg, Eric Undersander, Erik Wijmans, Yili Zhao, John Turner, Noah Maestre, Mustafa Mukadam, Devendra Chaplot, Oleksandr Maksymets, Aaron Gokaslan, Vladimir V ondrus, Sameer Dharur, Franziska Meier, Wojciech Galuba, Angel Chang, Zsolt Kira, Vladlen Koltun, Jitendra Malik, Manolis Savva, and Dhruv Batra. Habitat 2.0: Training home assist...
2021
-
[44]
Large language models as generalizable policies for embodied tasks
Andrew Szot, Max Schwarzer, Harsh Agrawal, Bogdan Ma- zoure, Rin Metcalf, Walter Talbott, Natalie Mackraz, R Devon Hjelm, and Alexander T Toshev. Large language models as generalizable policies for embodied tasks. InInternational Conference on Learning Representations (ICLR), 2023. 1, 2, 3, 5, 6
2023
-
[45]
Grounding multi- modal large language models in actions.Advances in Neural Information Processing Systems, 37:20198–20224, 2024
Andrew Szot, Bogdan Mazoure, Harsh Agrawal, R Devon Hjelm, Zsolt Kira, and Alexander Toshev. Grounding multi- modal large language models in actions.Advances in Neural Information Processing Systems, 37:20198–20224, 2024. 1, 3, 5, 6
2024
-
[46]
Gemma Team, Aishwarya Kamath, Johan Ferret, Shreya Pathak, Nino Vieillard, Ramona Merhej, Sarah Perrin, Ta- tiana Matejovicova, Alexandre Ram´e, Morgane Rivi`ere, Louis Rouillard, Thomas Mesnard, Geoffrey Cideron, Jean bastien Grill, Sabela Ramos, Edouard Yvinec, Michelle Casbon, Eti- enne Pot, Ivo Penchev, Ga¨el Liu, Francesco Visin, Kathleen Kenealy, Lu...
2025
-
[47]
Self-Consistency Improves Chain of Thought Reasoning in Language Models
Xuezhi Wang, Jason Wei, Dale Schuurmans, Quoc Le, Ed Chi, Sharan Narang, Aakanksha Chowdhery, and Denny Zhou. Self-consistency improves chain of thought reasoning in lan- guage models.arXiv preprint arXiv:2203.11171, 2022. 2, 6
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[48]
Chain-of- thought prompting elicits reasoning in large language mod- els.Advances in Neural Information Processing Systems (NeurIPS), 2022
Jason Wei, Xuezhi Wang, Dale Schuurmans, Maarten Bosma, Fei Xia, Ed Chi, Quoc V Le, Denny Zhou, et al. Chain-of- thought prompting elicits reasoning in large language mod- els.Advances in Neural Information Processing Systems (NeurIPS), 2022. 2, 4
2022
-
[49]
Efficient rein- forcement learning with large language model priors
Xue Yan, Yan Song, Xidong Feng, Mengyue Yang, Haifeng Zhang, Haitham Bou Ammar, and Jun Wang. Efficient rein- forcement learning with large language model priors. InIn- ternational Conference on Learning Representations (ICLR),
-
[50]
Embodiedbench: Comprehensive benchmarking multi-modal large language models for vision-driven embodied agents
Rui Yang, Hanyang Chen, Junyu Zhang, Mark Zhao, Cheng Qian, Kangrui Wang, Qineng Wang, Teja Venkat Koripella, Marziyeh Movahedi, Manling Li, et al. Embodiedbench: Comprehensive benchmarking multi-modal large language models for vision-driven embodied agents. InInternational Conference on Machine Learning (ICML), 2025. 1, 2, 3, 5, 6, 7, 8
2025
-
[51]
Embodied multi-modal agent trained by an llm from a parallel textworld
Yijun Yang, Tianyi Zhou, Kanxue Li, Dapeng Tao, Lusong Li, Li Shen, Xiaodong He, Jing Jiang, and Yuhui Shi. Embodied multi-modal agent trained by an llm from a parallel textworld. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 26275–26285, 2024. 1
2024
-
[52]
Ovm, outcome- supervised value models for planning in mathematical rea- soning
Fei Yu, Anningzhe Gao, and Benyou Wang. Ovm, outcome- supervised value models for planning in mathematical rea- soning. InFindings of the Association for Computational Linguistics: NAACL 2024, pages 858–875, 2024. 2, 4
2024
-
[53]
Robotic control via embod- ied chain-of-thought reasoning
Michał Zawalski, William Chen, Karl Pertsch, Oier Mees, Chelsea Finn, and Sergey Levine. Robotic control via embod- ied chain-of-thought reasoning. In8th Annual Conference on Robot Learning, 2024. 2, 4, 3
2024
-
[54]
Fine-tuning large vision-language models as decision- making agents via reinforcement learning.Advances in neural information processing systems, 37:110935–110971, 2024
Simon Zhai, Hao Bai, Zipeng Lin, Jiayi Pan, Peter Tong, Yifei Zhou, Alane Suhr, Saining Xie, Yann LeCun, Yi Ma, et al. Fine-tuning large vision-language models as decision- making agents via reinforcement learning.Advances in neural information processing systems, 37:110935–110971, 2024. 1, 2
2024
-
[55]
Generative verifiers: Reward modeling as next-token prediction
Lunjun Zhang, Arian Hosseini, Hritik Bansal, Mehran Kazemi, Aviral Kumar, and Rishabh Agarwal. Generative verifiers: Reward modeling as next-token prediction. InIn- ternational Conference on Learning Representations (ICLR),
-
[56]
Llamafac- tory: Unified efficient fine-tuning of 100+ language models
Yaowei Zheng, Richong Zhang, Junhao Zhang, Yanhan Ye, Zheyan Luo, Zhangchi Feng, and Yongqiang Ma. Llamafac- tory: Unified efficient fine-tuning of 100+ language models. InProceedings of the 62nd Annual Meeting of the Association for Computational Linguistics (Volume 3: System Demonstra- tions), Bangkok, Thailand, 2024. Association for Computa- tional Lin...
2024
-
[57]
Collaborative tree search for enhancing embodied multi-agent collaboration
Lizheng Zu, Lin Lin, Song Fu, Na Zhao, and Pan Zhou. Collaborative tree search for enhancing embodied multi-agent collaboration. InProceedings of the Computer Vision and Pattern Recognition Conference, pages 29513–29522, 2025. 2 Think Twice, Act Once: Verifier-Guided Action Selection For Embodied Agents Supplementary Material First, we provide additional ...
2025
-
[58]
Details about Benchmarks 8.1. LangR The LangR benchmark [ 44], built on the Habitat 2.0 [ 43] simulator, is designed to evaluate the generalization capability of embodied agents in household rearrangement scenarios. Agents receive high-level instructions and must execute tasks that involve manipulating objects (pick, open, place), searching for target ite...
-
[59]
Full finetuning is applied while keeping the vision encoder and projection module fixed
Training Details We train both the policy and verifier using the LLaMAFactory framework [56]. Full finetuning is applied while keeping the vision encoder and projection module fixed. All training runs are conducted on 8×NVIDIA L40 GPUs. Training data is formatted as multi turn dialogues us- ing thesharegptformat provided byLLaMAFactory. The inputs to the ...
-
[60]
{instruction}
Prompts 10.1. Prompt for CoT data generation Prompt to Generate Synthetic Chain-of-Thought (adapted and modified from [53]) 1You’re an expert reinforcement learning researcher. You’ve trained a policy for controlling a robot with an arm to move around and perform tasks in a household environment. 2The robot successfully completed a task specified by the i...
-
[61]
possible actions are: pick(object), place_on_recep(receptacle), navigate(receptacle), open_fridge(), close_fridge(), open_cabinet(cabinet)
-
[62]
Possible objects are: ball, clamp, hammer, screwdriver, padlock, scissors, block, drill, spatula, knife, spoon, plate, sponse, cleanser, plum, pear, peach, apple, lemon, can, box, banana, strawberry, lego, rubrik’s cube, book, bowl, cup, mug, orange, lid, toy airplane, wrench
-
[63]
I choose action XYZ because
When exploring, select from possible receptacles: [cabinet, drawer 7, cabinet drawer 6, fridge, chair, black table, brown table, TV stand, sink, right counter, left counter] 16 17## Your objective 18 19I want you to annotate the given trajectory with reasoning. That is, for each step, I need to know not only which action should be chosen, 20but importantl...
-
[64]
5 6verification:
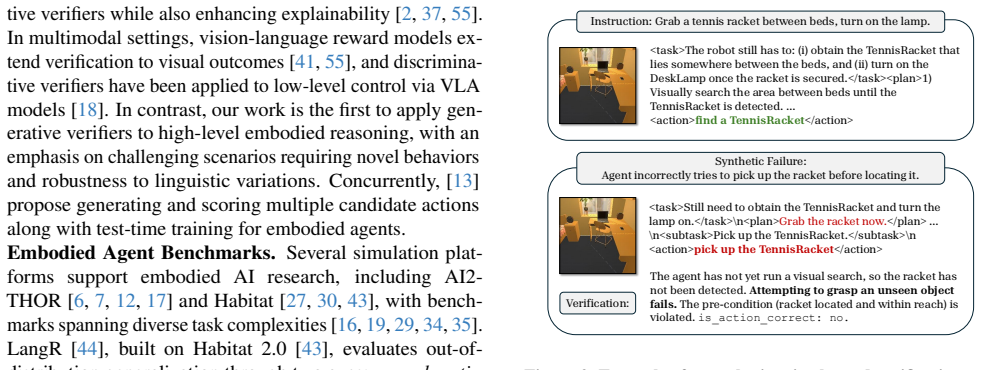
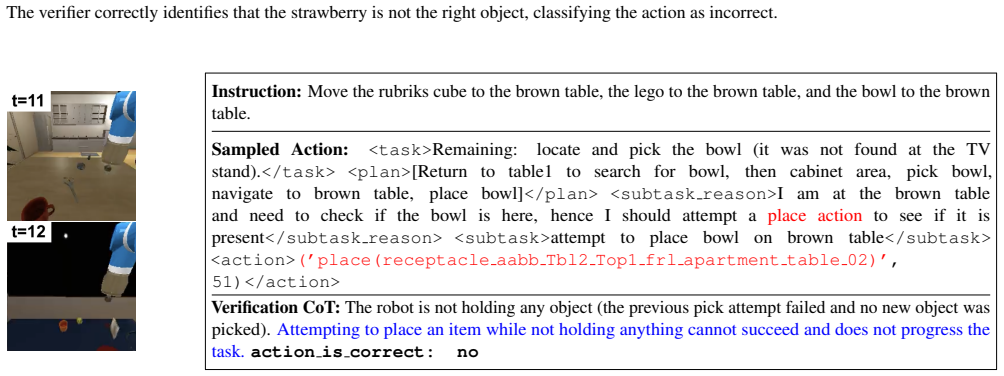
Examples of Synthetic Incorrect Actions Here, we show some examples of trajectories with synthetic mistakes generated by the LLM to train the verifier. 11.1. LangR Example 1 (LangR): The agent erroneously picks up the bowl even though the instruction specifies a cleaner. 1Instruction: Shift a cleanser and place it into the specified black table. 2 3 4acti...
-
[65]
purple fruit
Additional Qualitative Examples of Verification During Inference 12.1. LangR Instruction:Procure a purple fruit and deliver it to the left counter. Sampled Action: <task>Find and pick up the purple fruit and then deliver it to the left counter.</task> <plan>[Search TV stand, search sofa, search table2, pick fruit, navigate to left counter, place fruit]</p...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.