Recognition: no theorem link
A Lower Bound on the Self-intersections of Fold Singularities
Pith reviewed 2026-05-14 02:18 UTC · model grok-4.3
The pith
A sharp lower bound exists on the number of self-intersections of fold singularities for maps from oriented surfaces to the plane.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
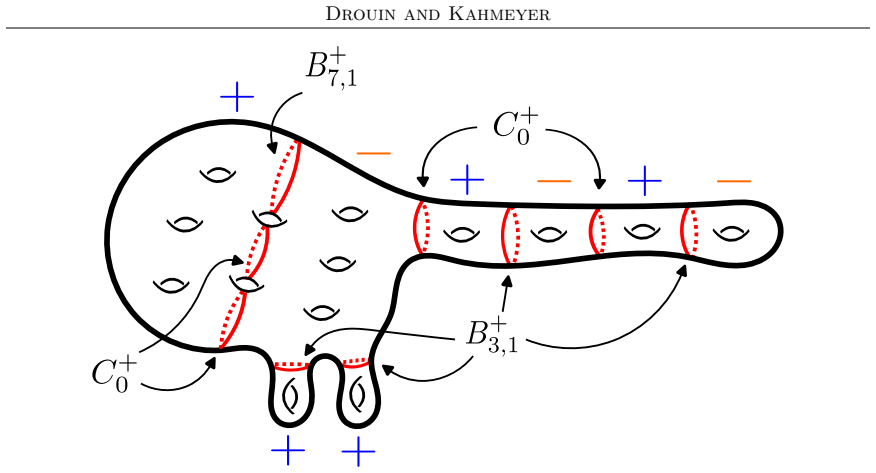
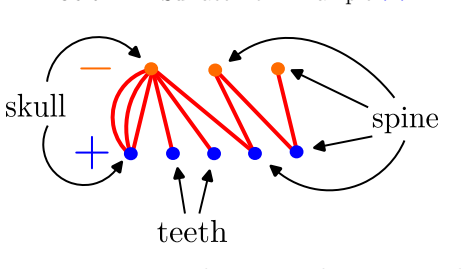
We construct a sharp lower bound on the number of self-intersections of such fold singularities. This is done by first establishing a sharp lower bound on the number of self-intersections of the boundary of a surface immersed in R^2. We then construct a sharp lower bound for the number of self-intersections of the singular set of a simple stable fold map of a surface to R^2 by viewing the connected components of the singular set as the boundary components of smaller surface components, and invoking the previously constructed lower bound for the number of self-intersections of an immersed boundary.
What carries the argument
Reduction of each connected component of the fold singular set to the boundary of a smaller immersed surface piece.
If this is right
- The bound is achieved by some explicit maps, so it cannot be improved.
- The same technique applies to any map whose singular set can be decomposed into closed curves treated as immersed boundaries.
- It supplies a numerical invariant that distinguishes certain stable maps from others.
- The result quantifies a topological obstruction that every such fold map must satisfy.
Where Pith is reading between the lines
- The method could be tested on explicit fold maps of the sphere or torus to see whether equality holds.
- Similar reductions might produce bounds for maps with cusp singularities as well.
- The bound may relate to Euler characteristic or other classical invariants of the source surface.
Load-bearing premise
The map is a simple stable fold map so that singular-set components can be treated directly as boundaries of smaller surface pieces.
What would settle it
A simple stable fold map whose singular curves self-intersect fewer times than the bound predicts would disprove the claim.
Figures









read the original abstract
For an oriented surface $S$, the singular set of a fold map $f:S\rightarrow \mathbb{R}^2$ is a collection of smooth curves, also known as fold singularities. We construct a sharp lower bound on the number of self-intersections of such fold singularities. This is done by first establishing a sharp lower bound on the number of self-intersections of the boundary of a surface immersed in $\mathbb{R}^2$. We then construct a sharp lower bound for the number of self-intersections of the singular set of a simple stable fold map of a surface to $\mathbb{R}^2$ by viewing the connected components of the singular set as the boundary components of smaller surface components, and invoking the previously constructed lower bound for the number of self-intersections of an immersed boundary.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript claims to construct a sharp lower bound on the number of self-intersections of fold singularities for a simple stable fold map f from an oriented surface S to R^2. The proof proceeds in two steps: first establishing a sharp lower bound on self-intersections of the boundary of an immersed surface in R^2, then applying this bound to the singular set of f by treating each connected component of the singular set as the boundary of a smaller surface component in the domain.
Significance. If the reduction step is valid, the result would supply a new quantitative constraint on the topology of fold curves in stable maps from surfaces to the plane. The explicit claim of sharpness is a strength, as it suggests the bound is attained for some maps, which would make the estimate useful for classification problems in singularity theory.
major comments (1)
- [Abstract and the two-step construction] Abstract, application step: the direct transfer of the immersed-boundary lower bound to fold singularities is load-bearing for the central claim but rests on an unverified assumption. By definition a fold singularity satisfies rank(df)=1 along the entire singular curve, so the restriction of f to any closed region whose boundary is a singular component fails to be an immersion at the boundary points. Standard results on immersed surfaces with boundary require injectivity of df on the full tangent space including the boundary; if the immersed-boundary bound uses this non-degeneracy (via local embedding, curvature estimates, or Gauss-Bonnet), the application does not follow without additional argument or a modified proof that accounts for the rank-1 degeneracy.
minor comments (1)
- The manuscript should include at least one explicit example of a fold map attaining equality in the bound, together with a verification that the singular set achieves the predicted number of self-intersections.
Simulated Author's Rebuttal
We thank the referee for their careful reading and for pinpointing a subtlety in the reduction from fold singularities to immersed boundaries. We agree that the manuscript would benefit from explicit verification that the rank-1 degeneracy does not invalidate the bound, and we will supply the missing argument in revision.
read point-by-point responses
-
Referee: Abstract, application step: the direct transfer of the immersed-boundary lower bound to fold singularities is load-bearing for the central claim but rests on an unverified assumption. By definition a fold singularity satisfies rank(df)=1 along the entire singular curve, so the restriction of f to any closed region whose boundary is a singular component fails to be an immersion at the boundary points. Standard results on immersed surfaces with boundary require injectivity of df on the full tangent space including the boundary; if the immersed-boundary bound uses this non-degeneracy (via local embedding, curvature estimates, or Gauss-Bonnet), the application does not follow without additional argument or a modified proof that accounts for the rank-1 degeneracy.
Authors: We acknowledge the referee's observation that the restriction of f to a closed region bounded by a fold component is not an immersion of a manifold with boundary, since rank(df)=1 on the boundary. Nevertheless, the proof of the immersed-boundary lower bound depends only on two properties that survive the degeneracy: (i) the map is an immersion on the interior of the region (regular points of f), and (ii) the boundary curve itself is immersed in R^2 (the tangential derivative along the singular curve is nonzero, as the kernel of df is transverse to the curve). Curvature estimates and the Gauss-Bonnet argument in the first part of the paper are applied to the interior and to the immersed boundary curve; they do not require full-rank df on the boundary tangent space. We will revise the manuscript by inserting a short lemma after the immersed-boundary theorem that confirms these two properties hold for the image of each fold-bounded component under a stable fold map, thereby justifying the direct invocation of the bound. No change to the numerical statement or sharpness claim is required. revision: yes
Circularity Check
Derivation chain is self-contained with independent immersed-boundary bound
full rationale
The paper first derives a sharp lower bound on self-intersections for boundaries of surfaces immersed in R² as an independent step. It then applies this bound to fold singularities by treating singular-set components as boundaries of smaller surface components in the domain. No step reduces the final claim to its inputs by construction, no fitted parameters are renamed as predictions, and no self-citation chain or ansatz smuggling is present. The immersed-boundary result supplies independent content that is not logically forced by the fold application.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The singular set of a fold map consists of smooth curves that can be treated as boundaries of smaller surface components.
- domain assumption A sharp lower bound exists for self-intersections of the boundary of an immersed surface in R^2.
Reference graph
Works this paper leans on
-
[1]
On singularities of folding type.Mathematics of the USSR-Izvestiya, 4(5):1119–1134, Oct 1970
Ya M Eliashberg. On singularities of folding type.Mathematics of the USSR-Izvestiya, 4(5):1119–1134, Oct 1970
work page 1970
-
[2]
Singularities, expanders and topology of maps
Mikhail Gromov. Singularities, expanders and topology of maps. part 1: Homology ver- sus volume in the spaces of cycles.Geometric and Functional Analysis, 19(3):743–841, Nov 2009
work page 2009
-
[3]
Minimal number of self-intersections of the boundary of an immersed surface in the plane, 2009
Larry Guth. Minimal number of self-intersections of the boundary of an immersed surface in the plane, 2009
work page 2009
-
[4]
Andr´ e Haefliger. Quelques remarques sur les applications diff´ erentiables d’une surface dans le plan.Annales de l’institut Fourier, 10:47–60, 1960
work page 1960
-
[5]
Stable maps of surfaces into the plane.Topology and its Applications, 107(3):307–316, Nov 2000
Tam´ as K´ alm´ an. Stable maps of surfaces into the plane.Topology and its Applications, 107(3):307–316, Nov 2000
work page 2000
-
[6]
The University Press of Virginia Charlottesville, 1965
John Willard Milnor.Topology from the differentiable viewpoint. The University Press of Virginia Charlottesville, 1965
work page 1965
-
[7]
Plane curves and contact geometry, 2005
Lenhard Ng. Plane curves and contact geometry, 2005
work page 2005
-
[8]
On surfaces and their contours.Manuscripta Mathematica, 72(1):223–249, Dec 1991
Roberto Pignoni. On surfaces and their contours.Manuscripta Mathematica, 72(1):223–249, Dec 1991
work page 1991
-
[9]
Andrey Ryabichev. Eliashberg’s h-principle and generic maps of surfaces with pre- scribed singular locus.Topology and its Applications, 276:107168, May 2020
work page 2020
-
[10]
Maps of manifolds of the same dimension with prescribed thom- boardman singularities, 2023
Andrey Ryabichev. Maps of manifolds of the same dimension with prescribed thom- boardman singularities, 2023. 27 Drouin and Kahmeyer
work page 2023
-
[11]
Simple stable maps of 3-manifolds into surfaces.Topology, 35(3):671–698, Jul 1996
Osamu Saeki. Simple stable maps of 3-manifolds into surfaces.Topology, 35(3):671–698, Jul 1996
work page 1996
-
[12]
On the topology of simple fold maps.Tokyo Journal of Mathematics, 17(1), Jun 1994
Kazuhiro Sakuma. On the topology of simple fold maps.Tokyo Journal of Mathematics, 17(1), Jun 1994
work page 1994
-
[13]
On regular closed curves in the plane.Compositio Mathematica, 4:276–284, 1937
Hassler Whitney. On regular closed curves in the plane.Compositio Mathematica, 4:276–284, 1937
work page 1937
-
[14]
Minoru Yamamoto. Immersions of surfaces with boundary into the plane.Pacific Journal of Mathematics, 212(2):371–376, Dec 2003
work page 2003
-
[15]
Minoru Yamamoto. The number of singular set components of fold maps between oriented surfaces.Houston Journal of Mathematics, 35(4):1051–1069, 2009
work page 2009
-
[16]
Takahiro Yamamoto. Number of singularities of stable maps on surfaces.Pacific Journal of Mathematics, 280(2):489–510, Jan 2016
work page 2016
-
[17]
Topology of stable maps of surfaces with boundary into the plane
Takahiro Yamamoto. Topology of stable maps of surfaces with boundary into the plane. Bulletin of the Brazilian Mathematical Society, New Series, 53(4):1291–1304, Jul 2022. Florida Polytechnic University Email address:jdrouin@floridapoly.edu Missouri V alley College Email address:kahmeyerl@moval.edu 28
work page 2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.