Recognition: 2 theorem links
· Lean TheoremPhantom Force: Injecting Adversarial Tactile Perceptions into Embodied Intelligence via EMI
Pith reviewed 2026-05-14 18:17 UTC · model grok-4.3
The pith
Electromagnetic interference can create phantom forces in robot fingertip sensors by amplifying perceived magnitudes over nine times and deviating directions by 65 degrees.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
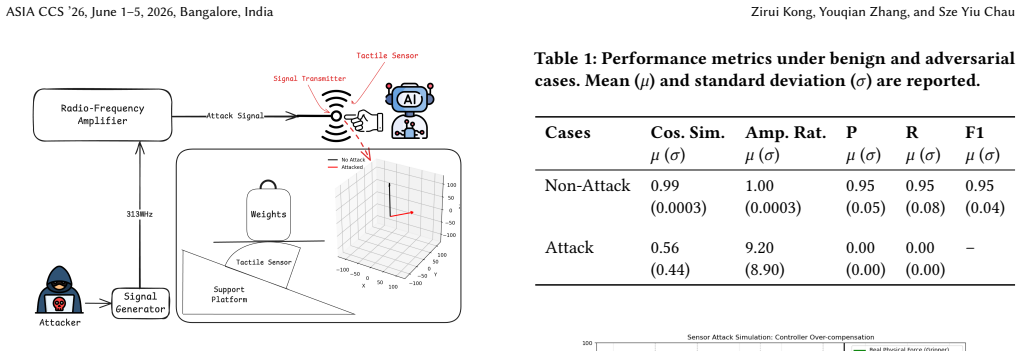
Targeted electromagnetic interference applied to Hall-effect fingertip sensors induces strong phantom forces. This amplifies the perceived force magnitude by over 9× and deviates the inferred force direction by 65°. The resulting perturbations paralyze learning-based tactile classification models, seriously affecting robot movement and enabling an attacker to coerce a robot hand into crushing fragile objects or dropping dangerous payloads.
What carries the argument
Targeted EMI signal injection into Hall-effect fingertip sensors that creates phantom forces to mislead the robot's force perception.
If this is right
- Learning-based tactile classification models become paralyzed under the induced perturbations.
- Robot movement is seriously affected by the false tactile data.
- Attackers can coerce robot hands to crush fragile objects.
- Attackers can cause robots to drop dangerous payloads.
Where Pith is reading between the lines
- This vulnerability could extend to other sensor types used in robotics beyond Hall-effect devices.
- Defenses might include adding EMI shielding to sensors or monitoring for sudden inconsistencies in force readings.
- Similar injection attacks could be tested on other embodied systems such as autonomous vehicles with tactile components.
Load-bearing premise
That the electromagnetic interference can be delivered in a targeted, practical manner on real robot hardware without triggering other detectable effects or existing mitigations.
What would settle it
A controlled experiment applying the EMI signal to a physical Hall-effect sensor on a robot hand and verifying if the reported force magnitude increases by over 9 times and direction shifts by 65 degrees compared to baseline measurements.
Figures


read the original abstract
Embodied intelligent robots rely on tactile sensors to interact with the physical world safely. While the security of visual perception systems has been studied (e.g., adversarial samples), the integrity of the tactile sensory channel remains unexplored. This work explores a vulnerability in Hall-effect fingertip sensors, showing their susceptibility to intentional Electromagnetic Interference (EMI). We demonstrate that a targeted signal injection can induce strong ``phantom forces'', amplifying perceived force magnitude by over \textbf{9$\times$} and deviating the inferred force direction by \textbf{65$^\circ$}. Such perturbations can paralyze learning-based tactile classification models, seriously affecting robot movement. An attacker could exploit this vulnerability to coerce a robot hand into crushing fragile objects or dropping dangerous payloads.
Editorial analysis
A structured set of objections, weighed in public.
Circularity Check
No significant circularity; results from direct experimental observation
full rationale
The paper's central claims (9× force amplification and 65° directional deviation) are presented as outcomes of hardware experiments injecting EMI into Hall-effect fingertip sensors. No mathematical derivation chain, parameter fitting, self-definitional equations, or load-bearing self-citations appear in the abstract or described content. The work is empirical rather than deductive, with no reduction of predictions to fitted inputs or renamed ansatzes. This is the common case of a self-contained experimental report whose validity rests on replicable measurements, not internal construction.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Hall-effect fingertip sensors respond to external electromagnetic fields in a manner that produces measurable force misreadings
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
a targeted signal injection can induce strong ``phantom forces'', amplifying perceived force magnitude by over 9× and deviating the inferred force direction by 65°
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
high-frequency emitter centered at 313 MHz... continuous-wave tone... near-field probe
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
NVIDIA. [n. d.].Isaac Sim. https://github.com/isaac-sim/IsaacSim
-
[2]
2006.How the Body Shapes the Way We Think: A New View of Intelligence
Rolf Pfeifer and Josh Bongard. 2006.How the Body Shapes the Way We Think: A New View of Intelligence. The MIT Press. doi:10.7551/mitpress/3585.001.0001
-
[3]
Yuchuang Tong, Haotian Liu, and Zhengtao Zhang. 2024. Advancements in Humanoid Robots: A Comprehensive Review and Future Prospects.IEEE/CAA Journal of Automatica Sinica11, 2 (February 2024), 301–328. doi:10.1109/JAS.2023. 124140
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.