Recognition: unknown
PhysEditBench: A Protocol-Conditioned Benchmark for Dense Physical-Map Prediction with Image Editors
Pith reviewed 2026-05-14 20:12 UTC · model grok-4.3
The pith
General image editors can output physical maps from RGB photos but trail specialized models on depth, normals, and albedo under fixed rules.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
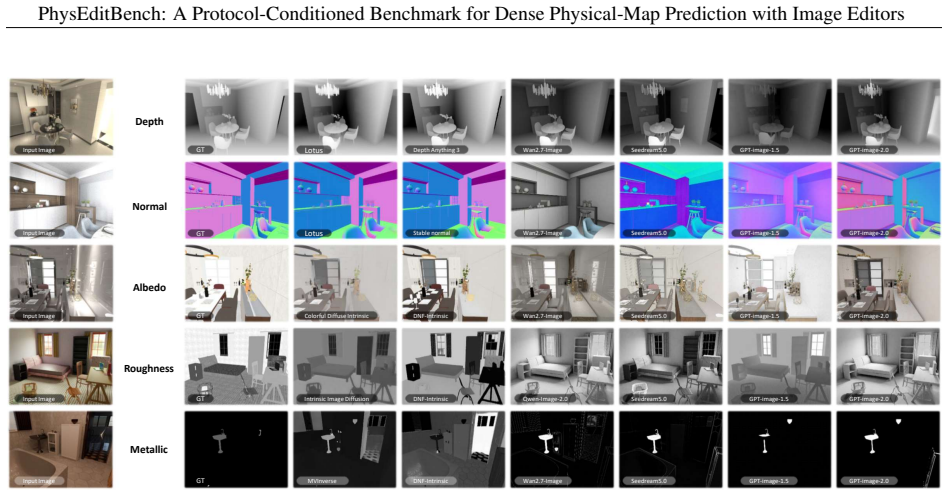
Under protocol-conditioned evaluation that fixes allowed inputs, output formats, and scoring procedures, general-purpose image editors produce lower accuracy than specialized dense-prediction models on depth, normal, and albedo maps; on roughness and metallic maps they can equal or exceed the baselines on certain scalar metrics while still exhibiting structural errors, sparsity artifacts, and lighting sensitivity.
What carries the argument
PhysEditBench, the protocol-conditioned benchmark that pairs single RGB images with ground-truth physical maps, valid-region masks, and lighting-stress subsets, and that scores every editor under a single fixed protocol per target map.
If this is right
- A single general editor could eventually handle multiple physical-property predictions if structural consistency improves under the same fixed rules.
- Material maps such as roughness remain sensitive to lighting changes even when scalar metrics look competitive.
- Curated datasets with scene-level sampling and quality masks provide a stable substrate for comparing editors against specialized models.
- Stronger editors already generate more map-like outputs, indicating that scaling or better training may close the gap on geometric targets.
Where Pith is reading between the lines
- The protocol approach could be applied to other dense-prediction tasks to make fair comparisons between general and specialized models.
- If editors improve on metallic maps generated procedurally, the same method might supply ground truth for additional hard-to-measure properties.
- Persistent lighting sensitivity suggests that future editor training should include explicit illumination variation during fine-tuning.
- Success on this benchmark would reduce the engineering cost of deploying separate networks for each physical map.
Load-bearing premise
The chosen fixed protocols represent the realistic capabilities of image editors without letting them use more effective prompting or interaction strategies.
What would settle it
Re-running the identical test images and editors but replacing the benchmark's fixed protocol with each editor's own best free-form prompting and observing whether map accuracy rises substantially above the protocol scores.
Figures










read the original abstract
Can general-purpose image editors predict physical maps from a single RGB image? General-purpose image editors differ from standard task-specific dense-prediction models: they do not directly take an image and output a physical map. Instead, they must be guided by prompts, examples, or image-based textual cues. To this end, we introduce PhysEditBench, a novel protocol-conditioned benchmark to evaluate and standardize image editors in dense physical-map prediction that covers five targets: depth, normal, albedo, roughness, and metallic maps. For evaluation data, we build a target-dependent benchmark substrate. We use OpenRooms-FF for depth, surface normal, albedo, and roughness, InteriorVerse as an additional source for depth, normal, albedo, and a new procedurally generated source for metallic maps. We curate the data with quality checks, valid-region masks, scene-level sampling, and lighting-based stress subsets to ensure reliable and diverse evaluation. For each target, PhysEditBench defines a fixed protocol that specifies the allowed input, expected output format, and scoring procedure. Each score, therefore, reflects the performance of a model under a specified protocol, rather than its best possible performance under all prompts or interaction modes. Experimental results show that specialized models remain much stronger on depth, normal, and albedo, and stronger image editors can produce more reasonable map-like outputs. For roughness and metallic, image editors can match or outperform specialized baselines on some scalar metrics, but they still suffer from structural errors, sparsity effects, and sensitivity to lighting.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces PhysEditBench, a protocol-conditioned benchmark for evaluating general-purpose image editors on dense physical-map prediction from single RGB images across five targets: depth, surface normals, albedo, roughness, and metallic. It constructs target-specific evaluation substrates from OpenRooms-FF, InteriorVerse, and procedurally generated metallic data, applying curation steps including quality checks, valid-region masks, scene sampling, and lighting-based stress subsets. Fixed protocols per target specify allowed inputs, output formats, and scoring procedures. Experiments show specialized models outperform editors on depth, normal, and albedo; editors produce more reasonable outputs with stronger models and can match or exceed specialized baselines on scalar metrics for roughness and metallic, though they exhibit structural errors, sparsity, and lighting sensitivity.
Significance. If the benchmark protocols and results hold, the work provides a standardized, reproducible framework for assessing image editors on physical-property tasks that are conventionally addressed by task-specific models. It highlights domain-specific strengths and gaps, particularly the editors' competitiveness on scalar roughness/metallic metrics versus persistent structural shortcomings. Credit is due for the multi-source dataset curation, explicit lighting stress tests, and separation of scalar versus structural evaluation, which together enable targeted diagnosis of editor limitations.
major comments (2)
- [Abstract, §3] Abstract and evaluation protocol description: the fixed protocols are central to the claim that scores reflect performance 'under a specified protocol, rather than its best possible performance,' yet the manuscript provides only high-level specifications without the exact prompt templates, in-context example counts, or output-format constraints used for each target. This directly affects reproducibility and the interpretation of editor vs. specialized-model comparisons.
- [§4, Table 2] Results section on roughness and metallic: the claim that editors 'can match or outperform specialized baselines on some scalar metrics' is load-bearing for the overall narrative, but the manuscript does not report the precise scalar metrics (e.g., MAE, RMSE) or the number of lighting-stress samples on which this holds, nor does it quantify the structural errors (e.g., via edge F1 or spatial correlation) that are said to remain.
minor comments (2)
- [§2.2] Dataset curation paragraph: state the exact number of retained scenes per target after quality checks and the precise definition of 'valid-region masks' so that future extensions can replicate the substrate.
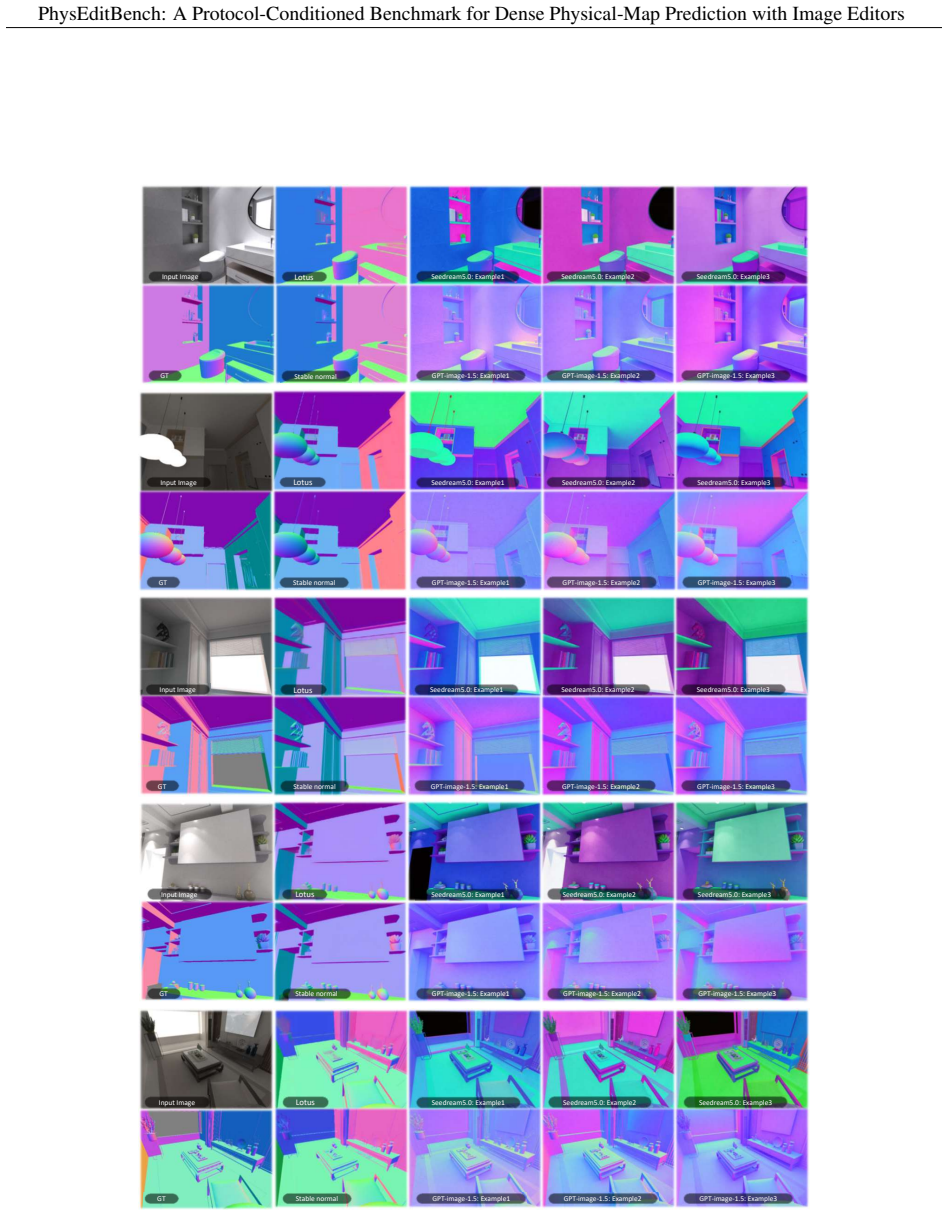
- [Figure 4] Figure captions and legends: ensure every qualitative example explicitly annotates which protocol (including any example-image count) was applied to each editor output.
Simulated Author's Rebuttal
We thank the referee for their constructive feedback and positive assessment of PhysEditBench. We address each major comment below and will incorporate the suggested clarifications in the revised manuscript.
read point-by-point responses
-
Referee: [Abstract, §3] Abstract and evaluation protocol description: the fixed protocols are central to the claim that scores reflect performance 'under a specified protocol, rather than its best possible performance,' yet the manuscript provides only high-level specifications without the exact prompt templates, in-context example counts, or output-format constraints used for each target. This directly affects reproducibility and the interpretation of editor vs. specialized-model comparisons.
Authors: We agree that the exact prompt templates, in-context example counts, and output-format constraints are necessary for full reproducibility. In the revised version we will expand the protocol description in §3 (and add a dedicated appendix) with the complete prompt templates, example counts, and output-format constraints for each of the five targets. These details will also be released with the benchmark code and data. revision: yes
-
Referee: [§4, Table 2] Results section on roughness and metallic: the claim that editors 'can match or outperform specialized baselines on some scalar metrics' is load-bearing for the overall narrative, but the manuscript does not report the precise scalar metrics (e.g., MAE, RMSE) or the number of lighting-stress samples on which this holds, nor does it quantify the structural errors (e.g., via edge F1 or spatial correlation) that are said to remain.
Authors: We acknowledge that the current presentation of scalar results and structural-error quantification is insufficient. In the revision we will update Table 2 and the §4 text to report the exact MAE and RMSE values, the precise number of lighting-stress samples, and additional structural metrics (edge F1 and spatial correlation) for roughness and metallic. This will make the comparison with specialized baselines fully transparent. revision: yes
Circularity Check
No significant circularity
full rationale
This is an empirical benchmark paper that defines fixed protocols for evaluating image editors on external datasets (OpenRooms-FF, InteriorVerse, procedural metallic maps) with explicit curation steps and quality checks. No derivations, equations, fitted parameters, or self-citation chains are present that reduce any claim to its own inputs by construction. All performance claims are qualified against the stated protocols and external ground truth, satisfying the self-contained benchmark criterion.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Curated datasets from OpenRooms-FF, InteriorVerse, and the procedural metallic source provide accurate and representative ground truth for physical maps.
- domain assumption Fixed protocols reflect realistic usage of image editors without introducing bias from prompt variation.
Reference graph
Works this paper leans on
-
[1]
Gwangbin Bae and Andrew J. Davison. Rethinking inductive biases for surface normal estimation. InProceed- ings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2024
2024
-
[2]
Tim Brooks, Aleksander Holynski, and Alexei A. Efros. Instructpix2pix: Learning to follow image editing instructions. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2023
2023
-
[3]
Seedream 5.0 lite.https://seed.bytedance.com/en/seedream5_0_lite, 2026
ByteDance Seed. Seedream 5.0 lite.https://seed.bytedance.com/en/seedream5_0_lite, 2026. Ac- cessed: 2026-05-06
2026
-
[4]
Colorful diffuse intrinsic image decomposition in the wild.ACM Transactions on Graphics, 43(6), 2024
Chris Careaga and Ya ˘gız Aksoy. Colorful diffuse intrinsic image decomposition in the wild.ACM Transactions on Graphics, 43(6), 2024. doi: 10.1145/3687984
-
[5]
Intrinsicanything: Learning diffusion priors for inverse rendering under unknown illumination
Xi Chen, Sida Peng, Dongchen Yang, Yuan Liu, Bowen Pan, Chengfei Lv, and Xiaowei Zhou. Intrinsicanything: Learning diffusion priors for inverse rendering under unknown illumination. InEuropean Conference on Com- puter Vision, 2024
2024
-
[6]
Mair: Multi- view attention inverse rendering with 3d spatially-varying lighting estimation
JunYong Choi, SeokYeong Lee, Haesol Park, Seung-Won Jung, Ig-Jae Kim, and Junghyun Cho. Mair: Multi- view attention inverse rendering with 3d spatially-varying lighting estimation. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2023. Introduces the OpenRooms Forward Facing (OpenRooms FF) dataset
2023
-
[7]
Valentin Gabeur, Shangbang Long, Songyou Peng, Paul V oigtlaender, Shuyang Sun, Yanan Bao, Karen Truong, Zhicheng Wang, Wenlei Zhou, Jonathan T. Barron, Kyle Genova, Nithish Kannen, Sherry Ben, Yandong Li, Mandy Guo, Suhas Yogin, Yiming Gu, Huizhong Chen, Oliver Wang, Saining Xie, Howard Zhou, Kaiming He, Thomas Funkhouser, Jean-Baptiste Alayrac, and Radu...
-
[8]
Accepted by CVPR 2026
2026
-
[9]
Introducing gemini 2.5 flash image, google’s state-of-the-art image generation and editing model.https://developers.googleblog.com/en/introducing-gemini-2-5-flash-image/, 2025
Google. Introducing gemini 2.5 flash image, google’s state-of-the-art image generation and editing model.https://developers.googleblog.com/en/introducing-gemini-2-5-flash-image/, 2025. Accessed: 2026-05-06
2025
-
[10]
epbr: Extended pbr materials in image synthesis.arXiv preprint arXiv:2504.17062, 2025
Yu Guo, Zhiqiang Lao, Xiyun Song, Yubin Zhou, Zongfang Lin, and Heather Yu. epbr: Extended pbr materials in image synthesis.arXiv preprint arXiv:2504.17062, 2025
-
[11]
Lotus: Diffusion-based visual foundation model for high-quality dense prediction
Jing He, Haodong Li, Wei Yin, Yixun Liang, Leheng Li, Kaiqiang Zhou, Hongbo Zhang, Bingbing Liu, and Ying- Cong Chen. Lotus: Diffusion-based visual foundation model for high-quality dense prediction. InInternational Conference on Learning Representations (ICLR), 2025
2025
-
[12]
Intrinsic image diffusion for indoor single-view material estimation
Peter Kocsis, Vincent Sitzmann, and Matthias Nieß ner. Intrinsic image diffusion for indoor single-view material estimation. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2024
2024
-
[13]
Zhengqin Li, Ting-Wei Yu, Shen Sang, Sarah Wang, Meng Song, Yuhan Liu, Yu-Ying Yeh, Rui Zhu, Nitesh Bharadwaj Gundavarapu, Jia Shi, Sai Bi, Hong-Xing Yu, Zexiang Xu, Kalyan Sunkavalli, Miloš Hašan, Ravi Ramamoorthi, and Manmohan Chandraker. Openrooms: An open framework for photorealistic indoor scene datasets. InProceedings of the IEEE/CVF Conference on C...
-
[14]
What’s in the image? a deep-dive into the vision of vision language models
Chih-Hao Lin, Jia-Bin Huang, Zhengqin Li, Zhao Dong, Christian Richardt, Tuotuo Li, Michael Zollhöfer, Jo- hannes Kopf, Shenlong Wang, and Changil Kim. Iris: Inverse rendering of indoor scenes from low dynamic range images. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 465–474, 2025. doi: 10.1109/CVPR527...
-
[15]
Chen, Zhenyu Li, Guang Shi, Jiashi Feng, and Bingyi Kang
Haotong Lin, Sili Chen, Junhao Liew, Donny Y . Chen, Zhenyu Li, Guang Shi, Jiashi Feng, and Bingyi Kang. Depth anything 3: Recovering the visual space from any views, 2025. URLhttps://arxiv.org/abs/2511. 10647
2025
-
[16]
Hengyu Liu, Chenxin Li, Zhengxin Li, Yipeng Wu, Wuyang Li, Zhiqin Yang, Zhenyuan Zhang, Yunlong Lin, Sirui Han, and Brandon Y . Feng. Ir3d-bench: Evaluating vision-language model scene understanding as agentic inverse rendering. InAdvances in Neural Information Processing Systems, Track on Datasets and Benchmarks, 2025
2025
-
[17]
Wan-image: Pushing the boundaries of generative visual intelligence, 2026
Chaojie Mao, Chen-Wei Xie, Chongyang Zhong, Haoyou Deng, Jiaxing Zhao, Jie Xiao, Jinbo Xing, Jingfeng Zhang, Jingren Zhou, Jingyi Zhang, et al. Wan-image: Pushing the boundaries of generative visual intelligence, 2026
2026
-
[18]
Gpt image 1.5 model.https://developers.openai.com/api/docs/models/gpt-image-1.5,
OpenAI. Gpt image 1.5 model.https://developers.openai.com/api/docs/models/gpt-image-1.5,
-
[19]
Accessed: 2026-05-06
2026
-
[20]
Gpt image 2 model.https://developers.openai.com/api/docs/models/gpt-image-2, 2026
OpenAI. Gpt image 2 model.https://developers.openai.com/api/docs/models/gpt-image-2, 2026. Accessed: 2026-05-06
2026
-
[21]
Qwen-image-2.0: Professional infographics, exquisite text rendering, and unified generation + editing.https://qwen.ai/blog?id=qwen-image-2.0, 2026
Qwen Team. Qwen-image-2.0: Professional infographics, exquisite text rendering, and unified generation + editing.https://qwen.ai/blog?id=qwen-image-2.0, 2026. Accessed: 2026-05-06
2026
-
[22]
Infinite photorealistic worlds using procedural generation
Alexander Raistrick, Lahav Lipson, Zeyu Ma, Lingjie Mei, Mingzhe Wang, Yiming Zuo, Karhan Kayan, Hongyu Wen, Beining Han, Yihan Wang, Alejandro Newell, Hei Law, Ankit Goyal, Kaiyu Yang, and Jia Deng. Infinite photorealistic worlds using procedural generation. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages...
2023
-
[23]
Infinigen indoors: Photorealistic indoor scenes using procedural generation
Alexander Raistrick, Lingjie Mei, Karhan Kayan, David Yan, Yiming Zuo, Beining Han, Hongyu Wen, Meenal Parakh, Stamatis Alexandropoulos, Lahav Lipson, Zeyu Ma, and Jia Deng. Infinigen indoors: Photorealistic indoor scenes using procedural generation. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 21783–21...
2024
-
[24]
Susskind
Mike Roberts, Jason Ramapuram, Anurag Ranjan, Atulit Kumar, Miguel Angel Bautista, Nathan Paczan, Russ Webb, and Joshua M. Susskind. Hypersim: A photorealistic synthetic dataset for holistic indoor scene under- standing. InProceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), 2021
2021
-
[25]
Emu edit: Precise image editing via recognition and generation tasks
Shelly Sheynin, Adam Polyak, Uriel Singer, Yuval Kirstain, Amit Zohar, Oron Ashual, Devi Parikh, and Yaniv Taigman. Emu edit: Precise image editing via recognition and generation tasks. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2024
2024
-
[26]
Materialist: Physically Based Editing Using Single-Image Inverse Rendering
Lezhong Wang, Duc Minh Tran, Ruiqi Cui, Thomson TG, Anders Bjorholm Dahl, Siavash Arjomand Bigdeli, Jeppe Revall Frisvad, and Manmohan Chandraker. Materialist: Physically based editing using single-image inverse rendering, 2025. URLhttps://arxiv.org/abs/2501.03717
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[27]
Boosting 3d object generation through pbr materials, 2024
Yao Wang et al. Boosting 3d object generation through pbr materials, 2024. URLhttps://arxiv.org/abs/ 2411.16080
-
[28]
Xiangzuo Wu, Chengwei Ren, Jun Zhou, Xiu Li, and Yuan Liu. MVInverse: Feed-forward multi-view inverse rendering in seconds.arXiv preprint arXiv:2512.21003, 2025
-
[29]
Chongjie Ye, Lingteng Qiu, Xiaodong Gu, Qi Zuo, Yushuang Wu, Zilong Dong, Liefeng Bo, Yuliang Xiu, and Xiaoguang Han. Stablenormal: Reducing diffusion variance for stable and sharp normal.ACM Transactions on Graphics (TOG), 43(6):1–18, 2024. doi: 10.1145/3687971
-
[30]
Rgb↔x: Image decomposition and synthesis using material- and lighting-aware diffusion models
Zheng Zeng, Valentin Deschaintre, Iliyan Georgiev, Yannick Hold-Geoffroy, Yiwei Hu, Fujun Luan, Ling-Qi Yan, and Miloš Hašan. Rgb↔x: Image decomposition and synthesis using material- and lighting-aware diffusion models. InACM SIGGRAPH 2024 Conference Papers, 2024. doi: 10.1145/3641519.3657445
-
[31]
Magicbrush: A manually annotated dataset for instruction-guided image editing
Kai Zhang, Lingbo Mo, Wenhu Chen, Huan Sun, and Yu Su. Magicbrush: A manually annotated dataset for instruction-guided image editing. InAdvances in Neural Information Processing Systems, 2023
2023
-
[32]
Dnf-intrinsic: Deterministic noise-free diffusion for indoor inverse rendering
Rongjia Zheng, Qing Zhang, Chengjiang Long, and Wei-Shi Zheng. Dnf-intrinsic: Deterministic noise-free diffusion for indoor inverse rendering. InProceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), 2025
2025
-
[33]
Learning-based inverse rendering of complex indoor scenes with differentiable monte carlo raytracing
Jingsen Zhu, Fujun Luan, Yuchi Huo, Zihao Lin, Zhihua Zhong, Dianbing Xi, Rui Wang, Hujun Bao, Jiaxiang Zheng, and Rui Tang. Learning-based inverse rendering of complex indoor scenes with differentiable monte carlo raytracing. InSIGGRAPH Asia 2022 Conference Papers, 2022. doi: 10.1145/3550469.3555407. 10 PhysEditBench: A Protocol-Conditioned Benchmark for...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.