Recognition: 2 theorem links
· Lean TheoremDecentralized Frequency-Domain Conditions for D-Stability with Application to DC Microgrids
Pith reviewed 2026-05-14 17:58 UTC · model grok-4.3
The pith
Decentralized local frequency-domain criteria guarantee D-stability in networked linear systems and enable broadcastable parameter synthesis for DC microgrids.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
We prove that D-stability is guaranteed via local frequency-domain criteria without requiring shared subsystem models or inter-subsystem communication.
Load-bearing premise
The target region D can be mapped to an auxiliary left-half plane such that positive functions exist to certify the resulting complex-coefficient dynamics; this mapping and function construction must hold for the specific network topology.
Figures



read the original abstract
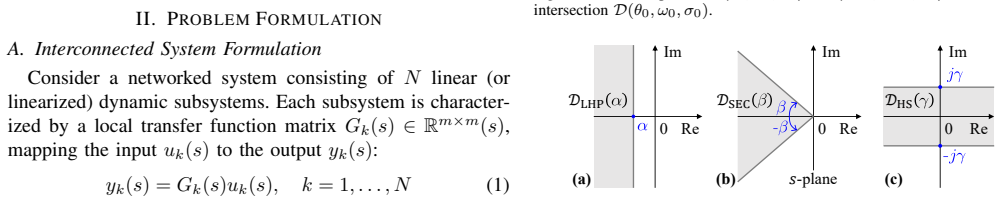
This paper proposes a decentralized method for regional pole placement, or $\mathcal{D}$-stability, in linearized networked systems. Existing LMI-based methods are hindered by confidentiality concerns regarding proprietary subsystem models and the absence of communication infrastructures. To overcome these barriers, we map the target region $\mathcal{D}$ of pole placement to an auxiliary left-half plane and introduce positive functions to handle the resulting complex-coefficient dynamics. We prove that $\mathcal{D}$-stability is guaranteed via local frequency-domain criteria without requiring shared subsystem models or inter-subsystem communication. This method is then tailored to DC microgrids, where a loop transformation is utilized to reallocate the burden of stability certification, deriving a broadcastable grid code for decentralized parameter synthesis. Numerical examples verify the efficacy of the proposed method.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a decentralized frequency-domain method for D-stability (regional pole placement) in linearized networked systems. It maps the target region D to an auxiliary left-half plane, introduces positive functions to certify stability of the resulting complex-coefficient dynamics, and proves that local frequency-domain criteria suffice without shared subsystem models or communication. The approach is specialized to DC microgrids via a loop transformation that yields a broadcastable grid code for decentralized parameter synthesis, with numerical examples verifying performance.
Significance. If the central claims hold, the work offers a practical alternative to centralized LMI methods for systems where model confidentiality and lack of communication are constraints, such as DC microgrids. The derivation of a broadcastable grid code and the frequency-domain decentralization are notable strengths for implementation. The approach is general for networked linear systems and could enable scalable stability certification in power electronics and similar domains.
major comments (2)
- [Section 3 (mapping and positive-function construction)] The central proof relies on the existence and construction of positive functions that certify stability for the complex-coefficient dynamics after the D-to-LHP mapping. The manuscript does not provide explicit constructions, error bounds, or verification steps for these functions in the general case (see the derivation following the mapping step and the statement of the local criteria). This is load-bearing for the claim that D-stability is guaranteed via local criteria alone.
- [Section 5 (DC microgrid specialization)] In the DC microgrid application, the loop transformation reallocates the stability burden, but the resulting broadcastable grid code's dependence on the specific network topology and the handling of complex coefficients in the frequency-domain test are not fully detailed with respect to robustness margins or parameter ranges.
minor comments (2)
- [Section 2] Notation for the positive functions and the auxiliary LHP mapping could be clarified with a dedicated table or diagram to improve readability for readers unfamiliar with the complex-coefficient extension.
- [Section 6] The numerical examples would benefit from explicit comparison metrics (e.g., pole locations before/after synthesis) against a centralized LMI baseline to quantify the decentralization benefit.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on our manuscript. We address each major comment point by point below and indicate the planned revisions.
read point-by-point responses
-
Referee: [Section 3 (mapping and positive-function construction)] The central proof relies on the existence and construction of positive functions that certify stability for the complex-coefficient dynamics after the D-to-LHP mapping. The manuscript does not provide explicit constructions, error bounds, or verification steps for these functions in the general case (see the derivation following the mapping step and the statement of the local criteria). This is load-bearing for the claim that D-stability is guaranteed via local criteria alone.
Authors: The manuscript establishes existence of the positive functions via the D-to-LHP mapping and derives the local criteria from that assumption. We acknowledge that explicit constructions, error bounds, and verification steps for the general case are not provided. In the revision we will add a dedicated subsection detailing constructive procedures for these functions, including verification steps and error bounds to support the local criteria. revision: yes
-
Referee: [Section 5 (DC microgrid specialization)] In the DC microgrid application, the loop transformation reallocates the stability burden, but the resulting broadcastable grid code's dependence on the specific network topology and the handling of complex coefficients in the frequency-domain test are not fully detailed with respect to robustness margins or parameter ranges.
Authors: The loop transformation is constructed precisely so that the resulting grid code depends only on local parameters and can be broadcast without topology-specific information. Complex coefficients are incorporated directly into the positive-function frequency-domain test. We agree that robustness margins and explicit parameter ranges merit further elaboration; we will expand Section 5 with sensitivity analysis to topology variations and concrete bounds on the admissible parameter sets. revision: yes
Circularity Check
Derivation self-contained; no circular reductions identified
full rationale
The paper maps the target D-region to an auxiliary LHP, constructs positive functions for the resulting complex-coefficient system, and derives local frequency-domain criteria from these steps. No equation or claim reduces by construction to a fitted parameter, self-referential definition, or load-bearing self-citation. The decentralization result follows directly from the mapping and positive-function certification without re-using the target stability property as an input. The approach is presented as a general proof for linearized networked systems, with the DC-microgrid application obtained via an explicit loop transformation; both steps are independent of the final stability certificate.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Any target region D can be mapped to an auxiliary left-half plane while preserving the stability certification problem
- ad hoc to paper Positive functions exist that certify stability for the complex-coefficient dynamics obtained after the mapping
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We map the target region D of pole placement to an auxiliary left-half plane and introduce positive functions to handle the resulting complex-coefficient dynamics. We prove that D-stability is guaranteed via local frequency-domain criteria
-
IndisputableMonolith/Foundation/BranchSelection.leanbranch_selection unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
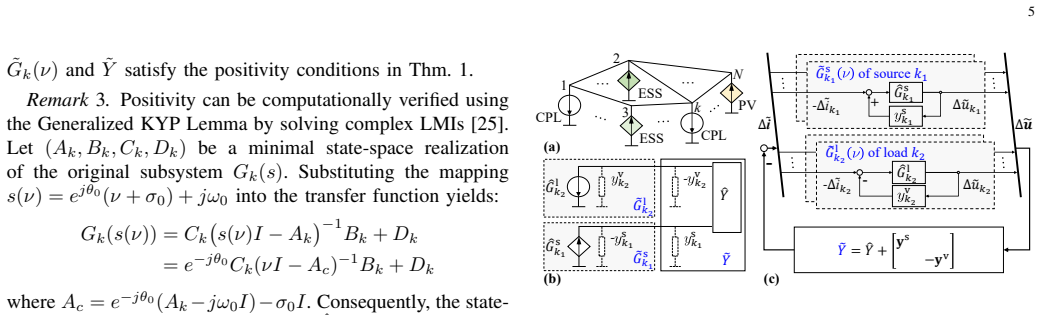
the modified entities G̃k(ν) and Ỹ satisfy the positivity conditions in Thm. 1
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Hybrid oscillation damping and inertia management for distributed energy resources,
C. Feng, L. Huang, X. He, Y . Wang, F. D ¨orfler, and C. Kang, “Hybrid oscillation damping and inertia management for distributed energy resources,”IEEE Transactions on Power Systems, vol. 40, no. 6, pp. 5041–5056, 2025
2025
-
[2]
H ∞ design with pole placement constraints: an lmi approach,
M. Chilali and P. Gahinet, “H ∞ design with pole placement constraints: an lmi approach,”IEEE Transactions on Automatic Control, vol. 41, no. 3, pp. 358–367, 1996
1996
-
[3]
Robust pole placement in lmi regions,
M. Chilali, P. Gahinet, and P. Apkarian, “Robust pole placement in lmi regions,”IEEE transactions on Automatic Control, vol. 44, no. 12, pp. 2257–2270, 1999
1999
-
[4]
Multiobjective output-feedback control via lmi optimization,
C. Scherer, P. Gahinet, and M. Chilali, “Multiobjective output-feedback control via lmi optimization,”IEEE Transactions on automatic control, vol. 42, no. 7, pp. 896–911, 1997
1997
-
[5]
An improved lmi condition for robust d- stability of uncertain polytopic systems,
V . J. Leite and P. L. Peres, “An improved lmi condition for robust d- stability of uncertain polytopic systems,”IEEE Transactions on Auto- matic Control, vol. 48, no. 3, pp. 500–504, 2003
2003
-
[6]
Robust H ∞ load-frequency control for interconnected power systems with d-stability constraints via lmi approach,
A. Kanchanaharuthai and P. Ngamsom, “Robust H ∞ load-frequency control for interconnected power systems with d-stability constraints via lmi approach,” inProceedings of the 2005, American Control Conference, 2005.IEEE, 2005, pp. 4387–4392
2005
-
[7]
D-stability and d-stabilization of linear discrete time-delay systems with polytopic uncertainties,
W.-J. Mao and J. Chu, “D-stability and d-stabilization of linear discrete time-delay systems with polytopic uncertainties,”Automatica, vol. 45, no. 3, pp. 842–846, 2009
2009
-
[8]
Duan and H.-H
G.-R. Duan and H.-H. Yu,LMIs in control systems: analysis, design and applications. CRC press, 2013
2013
-
[9]
Regional eigenvalue assignment in cooperative linear output regulation,
A. T. Koru, S. B. Sarsılmaz, T. Yucelen, J. A. Muse, F. L. Lewis, and B. Ac ¸ıkmes ¸e, “Regional eigenvalue assignment in cooperative linear output regulation,”IEEE Transactions on Automatic Control, vol. 68, no. 7, pp. 4265–4272, 2022
2022
-
[10]
Privacy engineering for the smart micro-grid,
R. Pal, P. Hui, and V . Prasanna, “Privacy engineering for the smart micro-grid,”IEEE Transactions on Knowledge and Data Engineering, vol. 31, no. 5, pp. 965–980, 2018
2018
-
[11]
Data-driven-based privacy- preserving distributed resilient control for hybrid ac/dc microgrids,
H. Gao, S. Fan, B. Cai, and B. Wang, “Data-driven-based privacy- preserving distributed resilient control for hybrid ac/dc microgrids,” IEEE Transactions on Industrial Electronics, 2025
2025
-
[12]
On relationships among passivity, positive realness, and dissipativity in linear systems,
N. Kottenstette, M. J. McCourt, M. Xia, V . Gupta, and P. J. Antsaklis, “On relationships among passivity, positive realness, and dissipativity in linear systems,”Automatica, vol. 50, no. 4, pp. 1003–1016, 2014
2014
-
[13]
H. K. Khalil,Nonlinear Systems, 3rd ed. Englewood Cliffs, NJ, USA: Prentice-Hall, 2002
2002
-
[14]
Brogliato, R
B. Brogliato, R. Lozano, B. Maschke, and O. Egeland,Dissipative Sys- tems Analysis and Control: Theory and Applications, 3rd ed. Springer Cham, 2020
2020
-
[15]
Passivity-based decentralized criteria for small-signal stability of power systems with converter-interfaced gener- ation,
K. Dey and A. Kulkarni, “Passivity-based decentralized criteria for small-signal stability of power systems with converter-interfaced gener- ation,”IEEE Transactions on Power Systems, vol. 38, no. 3, pp. 2820– 2833, 2022
2022
-
[16]
Power oscillations damping in dc microgrids,
M. Hamzeh, M. Ghafouri, H. Karimi, K. Sheshyekani, and J. M. Guer- rero, “Power oscillations damping in dc microgrids,”IEEE Transactions on Energy Conversion, vol. 31, no. 3, pp. 970–980, 2016
2016
-
[17]
Dc mi- crogrids—part i: A review of control strategies and stabilization tech- niques,
T. Dragi ˇcevi´c, X. Lu, J. C. Vasquez, and J. M. Guerrero, “Dc mi- crogrids—part i: A review of control strategies and stabilization tech- niques,”IEEE Transactions on power electronics, vol. 31, no. 7, pp. 4876–4891, 2015
2015
-
[18]
Distributed stability conditions for power systems with heterogeneous nonlinear bus dynamics,
P. Yang, F. Liu, Z. Wang, and C. Shen, “Distributed stability conditions for power systems with heterogeneous nonlinear bus dynamics,”IEEE Transactions on Power Systems, vol. 35, no. 3, pp. 2313–2324, 2019
2019
-
[19]
Passivity and decentralized stability conditions for grid-forming converters,
X. He and F. D ¨orfler, “Passivity and decentralized stability conditions for grid-forming converters,”IEEE Transactions on Power Systems, vol. 39, no. 3, pp. 5447–5450, 2024
2024
-
[20]
Decentralized stability analysis for dc microgrids with heterogeneous dynamics,
Z. Sun, S. Jiang, J. Zhang, X. He, and H. Geng, “Decentralized stability analysis for dc microgrids with heterogeneous dynamics,”IEEE Transactions on Smart Grid, vol. 17, no. 3, pp. 1756–1769, 2026
2026
-
[21]
Compositional grid codes with guarantee on both stability and dynamic performance,
X. Peng, C. Fu, Z. Li, X. Ru, Z. Wang, and F. Liu, “Compositional grid codes with guarantee on both stability and dynamic performance,”IEEE Transactions on Power Systems, 2026
2026
-
[22]
Synthesis of a finite two-terminal network whose driving- point impedance is a prescribed function of frequency,
O. Brune, “Synthesis of a finite two-terminal network whose driving- point impedance is a prescribed function of frequency,” Ph.D. disserta- tion, Massachusetts Institute of Technology, 1931
1931
-
[23]
B. D. Anderson and S. V ongpanitlerd,Network analysis and synthesis: a modern systems theory approach. Courier Corporation, 2013
2013
-
[24]
Classical network theory,
V . Belevitch, “Classical network theory,”Holden-day, vol. 7, 1968
1968
-
[25]
Generalized kyp lemma: Unified frequency domain inequalities with design applications,
T. Iwasaki, S. Hara,et al., “Generalized kyp lemma: Unified frequency domain inequalities with design applications,”IEEE Transactions on Automatic Control, vol. 50, no. 1, pp. 41–59, 2005
2005
-
[26]
Positive damping region: A graphic tool for passivization analysis with passivity index,
X. Peng, X. Ru, Z. Li, J. Zhang, X. Chen, and F. Liu, “Positive damping region: A graphic tool for passivization analysis with passivity index,” arXiv preprint arXiv:2601.10475, 2026
-
[27]
Region of attraction estimation for large-scale dc microgrids with low computations,
Z. Wu, H. Han, Z. Liu, L. Huang, M. Su, X. Zhang, and P. Wang, “Region of attraction estimation for large-scale dc microgrids with low computations,”IEEE Transactions on Smart Grid, 2024
2024
-
[28]
Mode switching-induced instability of multi-source feed dc microgrid,
S. Jiang, Z. Sun, J. Zhang, and H. Geng, “Mode switching-induced instability of multi-source feed dc microgrid,”IEEE Transactions on Smart Grid, 2025
2025
-
[29]
State-space variation induced instability during mode switching in multi-source dc microgrid,
S. Jiang, Z. Sun, J. Zhang, and H. Geng, “State-space variation induced instability during mode switching in multi-source dc microgrid,”IEEE Transactions on Smart Grid, 2025
2025
-
[30]
A comprehensive study on the existence and stability of equilibria of dc- distribution networks with constant power loads,
Z. Liu, M. Su, Y . Sun, X. Zhang, X. Liang, and M. Zheng, “A comprehensive study on the existence and stability of equilibria of dc- distribution networks with constant power loads,”IEEE Transactions on Automatic Control, vol. 67, no. 4, pp. 1988–1995, 2021
1988
-
[31]
Benchmark systems for small-signal stability analysis and control,
C. Canizares, T. Fernandes, E. Geraldi, L. Gerin-Lajoie, M. Gibbard, J. Kersulis, R. Kuiava, M. Lima, F. Demarco, N. Martins,et al., “Benchmark systems for small-signal stability analysis and control,” 2015
2015
-
[32]
Marden,Geometry of polynomials
M. Marden,Geometry of polynomials. American Mathematical Soc., 1949, no. 3
1949
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.