Recognition: unknown
Min Generalized Sliced Gromov Wasserstein: A Scalable Path to Gromov Wasserstein
Pith reviewed 2026-05-14 19:40 UTC · model grok-4.3
The pith
Min-GSGW learns coupled nonlinear slicers so that monotone 1D matching induces low-cost Gromov-Wasserstein transport plans in the original spaces.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
min-GSGW minimizes the Gromov-Wasserstein objective directly in the original spaces by searching over parameters of coupled generalized slicers; the optimal monotone coupling of the resulting one-dimensional push-forwards is lifted back to a transport plan whose GW cost serves as the training signal, yielding both the plan and its objective value at reduced expense.
What carries the argument
Coupled nonlinear slicers that produce compatible one-dimensional push-forwards whose monotone coupling induces a transport plan whose GW cost is minimized in the original spaces.
If this is right
- The induced transport plans supply geometrically meaningful correspondences for tasks such as mesh matching and shape interpolation.
- Rigid-motion invariance holds automatically because the final cost is evaluated with the original distances rather than projected distances.
- An amortized network version removes the need for per-instance optimization, enabling direct application to new pairs.
- Computational cost drops because only the slicer parameters are optimized instead of a full coupling matrix.
Where Pith is reading between the lines
- The same projection-learning idea could be applied to other quadratic optimal-transport objectives that currently lack fast solvers.
- If the slicers generalize across datasets, the amortized model might support real-time registration pipelines in robotics or graphics.
- Because the method decouples projection learning from the final cost evaluation, hybrid schemes that combine it with a small number of full GW refinement steps become feasible.
Load-bearing premise
The monotone coupling chosen in the projected one-dimensional domain produces a transport plan whose cost under the original Gromov-Wasserstein objective is close to the global minimum.
What would settle it
On a rigid-motion-invariant shape-matching benchmark, the GW costs or correspondence errors produced by min-GSGW plans are substantially worse than those returned by a converged exact or Sinkhorn GW solver.
Figures



read the original abstract
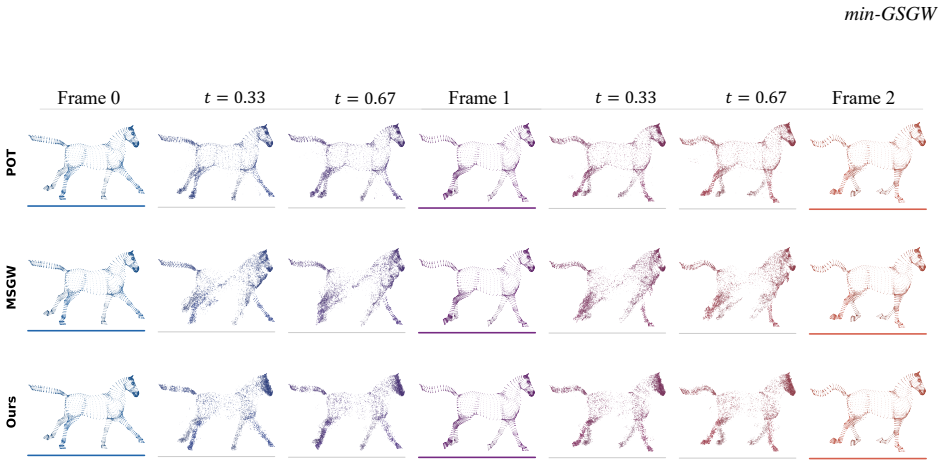
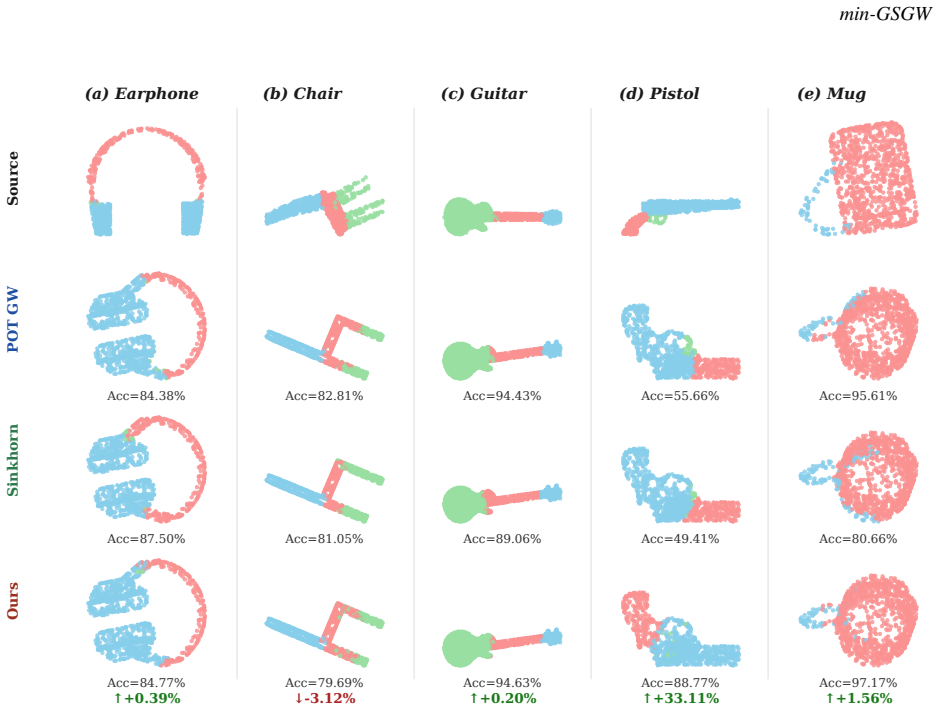
We propose min Generalized Sliced Gromov--Wasserstein (min-GSGW), a sliced formulation for the Gromov--Wasserstein (GW) problem using expressive generalized slicers. The key idea is to learn coupled nonlinear slicers that assign compatible push-forward values to both input measures, so that monotone coupling in the projected domain lifts to a transport plan evaluated against the GW objective in the original spaces. The resulting plan induces a GW objective value, and min-GSGW minimizes this cost directly in the original spaces. We further show that min-GSGW is rigid-motion invariant, a crucial property for geometric matching and shape analysis tasks. Our contributions are threefold: 1) we introduce generalized slicers into the sliced GW framework, 2) we construct a slicing-based efficient GW transport plan; and 3) we develop an amortized variant that replaces per-instance optimization with a learned slicer for unseen input pairs. We perform experiments on animal mesh matching, horse mesh interpolation, and ShapeNet part transfer. Results show that min-GSGW produces meaningful geometric correspondences and GW objective values at substantially lower computational cost than existing GW solvers.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes min Generalized Sliced Gromov-Wasserstein (min-GSGW), which learns coupled nonlinear slicers to project input measures, applies monotone 1D coupling in the projected domain, and lifts the resulting plan to evaluate and minimize the Gromov-Wasserstein objective directly in the original spaces. It further establishes rigid-motion invariance and presents an amortized variant that replaces per-pair optimization with a learned slicer. Experiments on animal mesh matching, horse mesh interpolation, and ShapeNet part transfer are reported to demonstrate meaningful correspondences at substantially lower cost than existing GW solvers.
Significance. If the lifted plans reliably achieve GW costs close to the global optimum, the approach would supply a practical, scalable route to GW distances and transport plans for large geometric datasets, addressing a key computational bottleneck in shape analysis and geometric machine learning.
major comments (3)
- [Abstract / lifting construction] Abstract and the section describing the lifting procedure: the statement that the monotone 1D coupling 'lifts to a transport plan evaluated against the GW objective in the original spaces' and that min-GSGW 'minimizes this cost directly' is load-bearing for the central efficiency claim, yet no explicit construction of the lift, no derivation that the induced cost equals the GW cost of the lifted plan, and no approximation bound relative to the true GW optimum are supplied.
- [Experiments] Experimental section (animal mesh matching and ShapeNet results): while lower wall-clock time is shown, the reported GW objective values are not compared quantitatively to those obtained from exact or high-accuracy GW solvers on the same instances (e.g., relative gap or rank correlation); without such controls the claim that the plans are 'meaningful' and constitute a 'scalable path' cannot be assessed.
- [Invariance proof] Section on rigid-motion invariance: the invariance property is asserted for the learned slicers, but the argument must be stated explicitly (including how the nonlinear slicer family interacts with isometries) because invariance alone does not address the approximation gap to the true GW optimum.
minor comments (2)
- [Amortized variant] The amortized variant is introduced in the contributions but its training objective and inference procedure are not contrasted clearly with the per-instance optimization; a short algorithmic box would improve readability.
- [Preliminaries] Notation for the generalized slicers and the push-forward measures should be introduced once with a single consistent symbol set rather than re-defined inline in multiple places.
Simulated Author's Rebuttal
We thank the referee for their detailed and constructive comments on our manuscript. We provide point-by-point responses to the major comments below, indicating where revisions will be made.
read point-by-point responses
-
Referee: [Abstract / lifting construction] Abstract and the section describing the lifting procedure: the statement that the monotone 1D coupling 'lifts to a transport plan evaluated against the GW objective in the original spaces' and that min-GSGW 'minimizes this cost directly' is load-bearing for the central efficiency claim, yet no explicit construction of the lift, no derivation that the induced cost equals the GW cost of the lifted plan, and no approximation bound relative to the true GW optimum are supplied.
Authors: We appreciate the referee's emphasis on this foundational aspect. In the revised version, we will provide an explicit construction of the lifting procedure from the 1D coupling to the original space transport plan, including the mathematical derivation that the GW cost is correctly computed on the lifted plan. Regarding the approximation bound to the true GW optimum, we note that establishing such a bound is non-trivial and not currently available; we will instead emphasize the empirical evidence and the method's practical utility. revision: partial
-
Referee: [Experiments] Experimental section (animal mesh matching and ShapeNet results): while lower wall-clock time is shown, the reported GW objective values are not compared quantitatively to those obtained from exact or high-accuracy GW solvers on the same instances (e.g., relative gap or rank correlation); without such controls the claim that the plans are 'meaningful' and constitute a 'scalable path' cannot be assessed.
Authors: We agree that additional quantitative validation against exact or high-accuracy solvers would strengthen the experimental claims. Since exact GW solvers scale poorly to the dataset sizes in our experiments, we will include new experiments on smaller instances where exact computation is feasible, reporting relative gaps and comparisons to other approximate GW methods to better assess the quality of the obtained transport plans. revision: yes
-
Referee: [Invariance proof] Section on rigid-motion invariance: the invariance property is asserted for the learned slicers, but the argument must be stated explicitly (including how the nonlinear slicer family interacts with isometries) because invariance alone does not address the approximation gap to the true GW optimum.
Authors: We will revise the section to include a detailed and explicit proof of rigid-motion invariance. The proof will demonstrate how the family of nonlinear slicers interacts with isometries to ensure the min-GSGW distance remains unchanged under simultaneous rigid transformations of both measures. revision: yes
- Establishing a theoretical approximation bound to the global optimum of the Gromov-Wasserstein distance.
Circularity Check
No circularity: minimization operates directly on GW objective of induced plans
full rationale
The paper defines min-GSGW explicitly as learning coupled nonlinear slicers, inducing a transport plan via 1D monotone coupling, then minimizing the GW cost of that plan evaluated in the original spaces. This is a parameterized optimization over a restricted class of plans, with the objective computed directly rather than by algebraic identity or fitted-parameter renaming. No equation reduces the reported GW value to an input by construction, no self-citation is load-bearing for the core claim, and no ansatz or uniqueness theorem is smuggled in. The approximation gap to true GW is a separate empirical question, not a circularity issue.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
On assignment problems related to gromov–wasserstein distances on the real line.SIAM Journal on Imaging Sciences, 16(2):1028–1032, 2023
Robert Beinert, Cosmas Heiss, and Gabriele Steidl. On assignment problems related to gromov–wasserstein distances on the real line.SIAM Journal on Imaging Sciences, 16(2):1028–1032, 2023
2023
-
[2]
ShapeNet: An Information-Rich 3D Model Repository
Angel X. Chang, Thomas Funkhouser, Leonidas Guibas, Pat Hanrahan, Qixing Huang, Zimo Li, Silvio Savarese, Manolis Savva, Shuran Song, Hao Su, Jianxiong Xiao, Li Yi, and Fisher Yu. ShapeNet: An Information-Rich 3D Model Repository. Technical Report arXiv:1512.03012 [cs.GR], Stanford University — Princeton University — Toyota Technological Institute at Chic...
work page internal anchor Pith review Pith/arXiv arXiv 2015
-
[3]
Differentiable generalized sliced wasserstein plans
Laetitia Chapel, Romain Tavenard, and Samuel Vaiter. Differentiable generalized sliced wasserstein plans. InThe Thirty-ninth Annual Conference on Neural Information Processing Systems, 2026
2026
-
[4]
Semidefinite relaxations of the gromov- wasserstein distance
Junyu Chen, Binh Nguyen, Shang Hui Koh, and Yong Sheng Soh. Semidefinite relaxations of the gromov- wasserstein distance. InThe Thirty-eighth Annual Conference on Neural Information Processing Systems, 2024
2024
-
[5]
Quantized gromov-wasserstein, 2021
Samir Chowdhury, David Miller, and Tom Needham. Quantized gromov-wasserstein, 2021
2021
-
[6]
Sinkhorn distances: Lightspeed computation of optimal transport
Marco Cuturi. Sinkhorn distances: Lightspeed computation of optimal transport. In C.J. Burges, L. Bottou, M. Welling, Z. Ghahramani, and K.Q. Weinberger, editors,Advances in Neural Information Processing Systems, volume 26. Curran Associates, Inc., 2013
2013
-
[7]
On the existence of monge maps for the gro- mov–wasserstein problem.Foundations of Computational Mathematics, 25(2):463–510, February 2024
Théo Dumont, Théo Lacombe, and François-Xavier Vialard. On the existence of monge maps for the gro- mov–wasserstein problem.Foundations of Computational Mathematics, 25(2):463–510, February 2024
2024
-
[8]
Alaya, Aurélie Boisbunon, Stanislas Chambon, Laetitia Chapel, Adrien Corenflos, Kilian Fatras, Nemo Fournier, Léo Gautheron, Nathalie T.H
Rémi Flamary, Nicolas Courty, Alexandre Gramfort, Mokhtar Z. Alaya, Aurélie Boisbunon, Stanislas Chambon, Laetitia Chapel, Adrien Corenflos, Kilian Fatras, Nemo Fournier, Léo Gautheron, Nathalie T.H. Gayraud, Hicham Janati, Alain Rakotomamonjy, Ievgen Redko, Antoine Rolet, Antony Schutz, Vivien Seguy, Danica J. Sutherland, Romain Tavenard, Alexander Tong,...
2021
-
[9]
Revisiting Frank-Wolfe: Projection-free sparse convex optimization
Martin Jaggi. Revisiting Frank-Wolfe: Projection-free sparse convex optimization. In Sanjoy Dasgupta and David McAllester, editors,Proceedings of the 30th International Conference on Machine Learning, volume 28 of Proceedings of Machine Learning Research, pages 427–435, Atlanta, Georgia, USA, 17–19 Jun 2013. PMLR
2013
-
[10]
Sampled gromov wasserstein.Machine Learning, 110(8):2151–2186, 2021
Tanguy Kerdoncuff, Rémi Emonet, and Marc Sebban. Sampled gromov wasserstein.Machine Learning, 110(8):2151–2186, 2021
2021
-
[11]
Efficient transferable optimal transport via min-sliced transport plans, 2025
Xinran Liu, Elaheh Akbari, Rocio Diaz Martin, Navid NaderiAlizadeh, and Soheil Kolouri. Efficient transferable optimal transport via min-sliced transport plans, 2025
2025
-
[12]
Expected sliced transport plans
Xinran Liu, Rocio Diaz Martin, Yikun Bai, Ashkan Shahbazi, Matthew Thorpe, Akram Aldroubi, and Soheil Kolouri. Expected sliced transport plans. In Y . Yue, A. Garg, N. Peng, F. Sha, and R. Yu, editors,International Conference on Learning Representations, volume 2025, pages 60948–60971, 2025
2025
-
[13]
Fast optimal transport through sliced generalized wasserstein geodesics
Guillaume Mahey, Laetitia Chapel, Gilles Gasso, Clément Bonet, and Nicolas Courty. Fast optimal transport through sliced generalized wasserstein geodesics. In A. Oh, T. Naumann, A. Globerson, K. Saenko, M. Hardt, and S. Levine, editors,Advances in Neural Information Processing Systems, volume 36, pages 35350–35385. Curran Associates, Inc., 2023
2023
-
[14]
Gromov-monge quasi-metrics and distance distributions.arXiv, 2018, 2018
Facundo Mémoli and Tom Needham. Gromov-monge quasi-metrics and distance distributions.arXiv, 2018, 2018
2018
-
[15]
Gromov-wasserstein distances and the metric approach to object matching.Foundations of Computational Mathematics, 11(4):417–487, 2011
Facundo Mémoli. Gromov-wasserstein distances and the metric approach to object matching.Foundations of Computational Mathematics, 11(4):417–487, 2011
2011
-
[16]
Max-min sliced gromov-wasserstein, 2026
Wen-Xin Pan, Isabel Haasler, and Hei Victor Cheng. Max-min sliced gromov-wasserstein, 2026
2026
-
[17]
Gromov-wasserstein averaging of kernel and distance matrices
Gabriel Peyré, Marco Cuturi, and Justin Solomon. Gromov-wasserstein averaging of kernel and distance matrices. In Maria Florina Balcan and Kilian Q. Weinberger, editors,Proceedings of The 33rd International Conference on Machine Learning, volume 48 ofProceedings of Machine Learning Research, pages 2664–2672, New York, New York, USA, 20–22 Jun 2016. PMLR
2016
-
[18]
Mark Rowland, Jiri Hron, Alexander G. de G. Matthews, and Zoubin Ghahramani. Orthogonal estimation of wasserstein distances. InInternational Conference on Artificial Intelligence and Statistics, volume 89 of Proceedings of Machine Learning Research, pages 186–195, 2019. 10 min-GSGW
2019
-
[19]
Linear-time gromov Wasserstein distances using low rank couplings and costs
Meyer Scetbon, Gabriel Peyré, and Marco Cuturi. Linear-time gromov Wasserstein distances using low rank couplings and costs. In Kamalika Chaudhuri, Stefanie Jegelka, Le Song, Csaba Szepesvari, Gang Niu, and Sivan Sabato, editors,Proceedings of the 39th International Conference on Machine Learning, volume 162 of Proceedings of Machine Learning Research, pa...
2022
-
[20]
Kim, and Suvrit Sra
Justin Solomon, Gabriel Peyré, Vladimir G. Kim, and Suvrit Sra. Entropic metric alignment for correspondence problems.ACM Trans. Graph., 35(4), July 2016
2016
-
[21]
Bednarczyk, Igor T
Łukasz Struski, Michał B. Bednarczyk, Igor T. Podolak, and Jacek Tabor. Lapsum - one method to differentiate them all: Ranking, sorting and top-k selection. InThe International Conference on Machine Learning (ICML) 2025, 2025
2025
-
[22]
Sumner and Jovan Popovi ´c
Robert W. Sumner and Jovan Popovi ´c. Deformation transfer for triangle meshes.ACM Trans. Graph., 23(3):399–405, August 2004
2004
-
[23]
Optimal transport for structured data with application on graphs
Vayer Titouan, Nicolas Courty, Romain Tavenard, Chapel Laetitia, and Rémi Flamary. Optimal transport for structured data with application on graphs. In Kamalika Chaudhuri and Ruslan Salakhutdinov, editors,Proceedings of the 36th International Conference on Machine Learning, volume 97 ofProceedings of Machine Learning Research, pages 6275–6284, Long Beach,...
2019
-
[24]
Sliced gromov-wasserstein
Vayer Titouan, Rémi Flamary, Nicolas Courty, Romain Tavenard, and Laetitia Chapel. Sliced gromov-wasserstein. In H. Wallach, H. Larochelle, A. Beygelzimer, F. d'Alché-Buc, E. Fox, and R. Garnett, editors,Advances in Neural Information Processing Systems, volume 32. Curran Associates, Inc., 2019
2019
-
[25]
Scalable gromov-wasserstein learning for graph partitioning and matching
Hongteng Xu, Dixin Luo, and Lawrence Carin. Scalable gromov-wasserstein learning for graph partitioning and matching. In H. Wallach, H. Larochelle, A. Beygelzimer, F. d'Alché-Buc, E. Fox, and R. Garnett, editors, Advances in Neural Information Processing Systems, volume 32. Curran Associates, Inc., 2019
2019
-
[26]
Duality and sample complexity for the gromov-wasserstein distance
Zhengxin Zhang, Ziv Goldfeld, Youssef Mroueh, and Bharath Sriperumbudur. Duality and sample complexity for the gromov-wasserstein distance. InNeurIPS 2023 Workshop Optimal Transport and Machine Learning, 2023. 11 min-GSGW A Ablation Study We ablate two orthogonal design choices ofmin-GSGW: whether the slicer family islinearornonlinear, and whether slicers...
2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.