Recognition: 1 theorem link
· Lean TheoremManipulation Planning for Construction Activities with Repetitive Tasks
Pith reviewed 2026-05-14 19:19 UTC · model grok-4.3
The pith
Robots generalize from one VR demonstration to build walls of arbitrary length by modeling motions as constant screw sequences.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
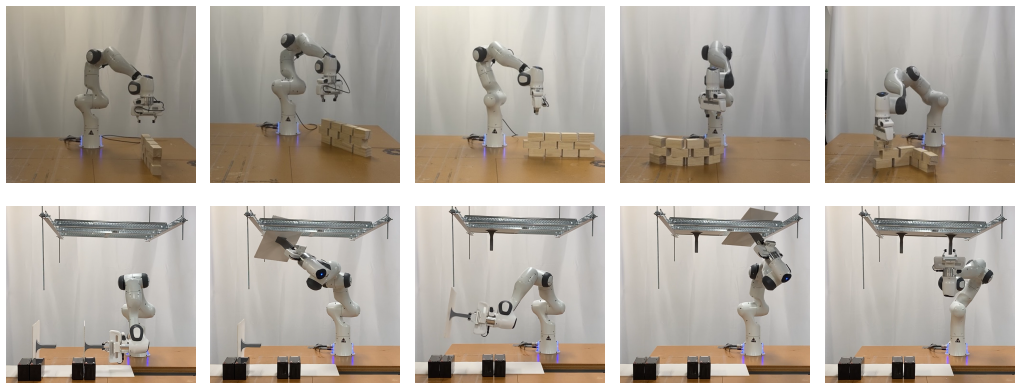
The central claim is that manipulation skills for repetitive construction activities can be acquired from a single VR demonstration by approximating the motion as a sequence of constant screw motions, generating the corresponding sequence of task instances, and computing the joint-space motion plan for each instance with Screw Linear Interpolation and Resolved Motion Rate Control, allowing a 7-DoF robot to perform arbitrarily long and precise activities such as building walls of any layout or installing multiple ceiling tiles.
What carries the argument
Approximation of demonstrated trajectories as sequences of constant screw motions, followed by ScLERP interpolation and RMRC control to produce repeatable joint plans.
If this is right
- Arbitrarily long brick walls of any layout can be constructed from a single pick-and-place demonstration.
- Multiple ceiling tiles can be installed from a single tile-installation demonstration.
- The same one-demonstration pipeline works for both simulation and real 7-DoF hardware execution.
- Precision is preserved across many repetitions without additional demonstrations or error-correction steps.
Where Pith is reading between the lines
- The approach could be tested on other repetitive assembly sequences such as stacking or fastening if their paths admit a screw-motion description.
- Capturing demonstrations in VR opens the possibility that non-experts could teach construction robots by performing the task once in a virtual setting.
- If small approximation errors do appear in very long sequences, an outer loop that measures actual brick positions and adjusts subsequent plans could be added.
- The method assumes the environment remains static and known; dynamic changes such as shifting materials would require additional sensing not addressed in the current framework.
Load-bearing premise
The demonstrated motion can be represented accurately enough as a sequence of constant screw motions that repeating those segments does not accumulate errors beyond the precision needed for the construction task.
What would settle it
Execute the generated plan for a wall of fifty bricks on the physical robot and check whether the final bricks remain within the positional tolerance required for stable stacking; deviation beyond tolerance would falsify the claim.
Figures



read the original abstract
In this paper, we study the problem of manipulation skill acquisition for performing construction activities consisting of repetitive tasks (e.g., building a wall or installing ceiling tiles). Our approach involves setting up a simulated construction activity in a Virtual Reality (VR) environment, where the user can provide demonstrations of the object manipulation skills needed to perform the construction activity. We then exploit the screw geometry of motion to approximate the demonstrated motion as a sequence of constant screw motions. For performing the construction activity, we generate the sequence of manipulation task instances and then compute the joint space motion plan corresponding to each instance using Screw Linear Interpolation (ScLERP) and Resolved Motion Rate Control (RMRC). We evaluate our framework by executing two representative construction tasks: constructing brick walls and installing multiple ceiling tiles. Each task is performed using only a single demonstration, a pick-and-place action for the bricks, and a single ceiling tile installation. Our experiments with a 7-DoF robot in both simulation and hardware demonstrate that the approach generalizes robustly to arbitrarily long construction activities that involve repetitive motions and demand precision, even when provided with just one demonstration. For instance, we can construct walls of arbitrary layout and length by leveraging a single demonstration of placing one brick on top of another.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a framework for acquiring and generalizing manipulation skills for repetitive construction tasks (e.g., brick wall building and ceiling tile installation). A single VR demonstration is approximated as a sequence of constant screw motions; ScLERP and RMRC are then used to generate joint-space plans for arbitrarily many task instances. Experiments with a 7-DoF robot in simulation and hardware are reported to show robust generalization to walls of arbitrary layout and length from one pick-and-place demonstration.
Significance. If the screw-motion approximation errors remain bounded under repetition, the approach would offer a practical route to one-shot skill transfer for precision construction robotics, reducing the need for repeated demonstrations. The use of standard screw theory and interpolation is technically straightforward, but the absence of quantitative error bounds or drift measurements leaves the central robustness claim only partially supported.
major comments (2)
- [Abstract] Abstract: the claim that the method 'generalizes robustly to arbitrarily long construction activities' and 'demand precision' is not accompanied by any bound on screw-approximation residual, measured positional drift after N repetitions, or hardware error statistics versus repetition count. Without these, the assertion that a single demonstration suffices for walls of arbitrary length cannot be evaluated.
- [Evaluation] Evaluation description: no quantitative metrics (e.g., end-effector RMSE, stacking success rate, or cumulative drift) are supplied for the multi-repetition trials, nor are baseline planners or alternative motion representations compared. This leaves the hardware success statements qualitative and prevents assessment of whether residuals compound beyond construction tolerances.
minor comments (1)
- The manuscript would benefit from an explicit statement of the construction tolerances assumed (e.g., allowable brick misalignment in mm) so that readers can judge whether the reported trials meet them.
Simulated Author's Rebuttal
We thank the referee for the detailed review and constructive suggestions. We address the concerns about the lack of quantitative error analysis and metrics in the evaluation section. We will revise the manuscript to include these quantitative assessments to better support our claims of robust generalization.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim that the method 'generalizes robustly to arbitrarily long construction activities' and 'demand precision' is not accompanied by any bound on screw-approximation residual, measured positional drift after N repetitions, or hardware error statistics versus repetition count. Without these, the assertion that a single demonstration suffices for walls of arbitrary length cannot be evaluated.
Authors: We agree that explicit quantitative bounds would strengthen the abstract's claims. In the revised manuscript, we will add specific bounds on the screw-approximation residual derived from our experiments, along with measured positional drift after multiple repetitions. Hardware error statistics versus repetition count will be included to demonstrate that drift remains within construction tolerances. This will support the assertion that a single demonstration suffices for arbitrary lengths. revision: yes
-
Referee: [Evaluation] Evaluation description: no quantitative metrics (e.g., end-effector RMSE, stacking success rate, or cumulative drift) are supplied for the multi-repetition trials, nor are baseline planners or alternative motion representations compared. This leaves the hardware success statements qualitative and prevents assessment of whether residuals compound beyond construction tolerances.
Authors: We acknowledge the absence of these quantitative metrics in the current version. In the revision, we will provide end-effector RMSE values, stacking success rates, and cumulative drift measurements for multi-repetition trials. Additionally, we will compare against baseline planners such as linear interpolation in joint space and alternative representations like DMPs to show the advantages of the screw-based approach. This will allow readers to assess if residuals compound beyond tolerances. revision: yes
Circularity Check
No load-bearing circularity; relies on standard screw theory and interpolation without self-referential reduction
full rationale
The paper decomposes a single VR demonstration into a sequence of constant screw motions using established screw geometry, then applies ScLERP interpolation and RMRC to generate joint-space plans for repeated instances. This is an application of prior techniques rather than a derivation that reduces the claimed generalization (arbitrarily long repetitive construction) to a fitted parameter or self-citation by construction. No equations equate target performance metrics to inputs from the same demonstration data, and the central claims rest on empirical hardware/simulation results rather than a closed mathematical loop. Minor self-citation of screw-theory foundations is present but not load-bearing for the repetition claim.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Demonstrated motions can be approximated as sequences of constant screw motions without loss of necessary task precision
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/AlexanderDuality.lean; IndisputableMonolith/Cost/FunctionalEquation.leanreality_from_one_distinction; washburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We then exploit the screw geometry of motion to approximate the demonstrated motion as a sequence of constant screw motions... using Screw Linear Interpolation (ScLERP) and Resolved Motion Rate Control (RMRC)
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
A. G. Billard, S. Calinon, and R. Dillmann, “Learning from humans,” Springer Handbook of Robotics, pp. 1995–2014, 2016. [Online]. Available: https://doi.org/10.1007/978-3-319-32552-1 74
-
[2]
Human-guided planning for complex manipulation tasks using the screw geometry of motion,
D. Mahalingam and N. Chakraborty, “Human-guided planning for complex manipulation tasks using the screw geometry of motion,” in2023 IEEE International Conference on Robotics and Automation (ICRA), 2023, pp. 7851–7857
2023
-
[3]
On screw linear interpola- tion for point-to-point path planning,
A. Sarker, A. Sinha, and N. Chakraborty, “On screw linear interpola- tion for point-to-point path planning,” in2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020, pp. 9480– 9487
2020
-
[4]
Resolved motion rate control of manipulators and human prostheses,
D. E. Whitney, “Resolved motion rate control of manipulators and human prostheses,”IEEE Transactions on Man-Machine Systems, vol. 10, no. 2, pp. 47–53, 1969
1969
-
[5]
Robotic on- site construction of masonry,
G. Pritschow, J. Kurz, T. Fessele, and F. Scheurer, “Robotic on- site construction of masonry,” inISARC proceedings of the 15th International Symposium on Automation and Robotics in Construction : Automation and robotics–todays reality in construction : bauma 98, W. Poppy and T. Bock, Eds. Munich, Germany: International Association for Automation and Robo...
1998
-
[6]
Robotics, “Sam,” https://www.construction-robotics.com/sam-2/, accessed: September 2025
C. Robotics, “Sam,” https://www.construction-robotics.com/sam-2/, accessed: September 2025
2025
-
[7]
A survey of robot learning from demonstration,
B. D. Argall, S. Chernova, M. Veloso, and B. Browning, “A survey of robot learning from demonstration,”Robotics and Autonomous Systems, vol. 57, no. 5, pp. 469–483, 2009. [Online]. Available: https: //www.sciencedirect.com/science/article/pii/S0921889008001772
2009
-
[8]
Algorithms for inverse reinforcement learning,
A. Y . Ng and S. J. Russell, “Algorithms for inverse reinforcement learning,” inProceedings of the Seventeenth International Conference on Machine Learning, ser. ICML ’00. San Francisco, CA, USA: Morgan Kaufmann Publishers Inc., 2000, p. 663–670
2000
-
[9]
Teaching robots to perform construction tasks via learning from demonstration,
C.-J. Liang, V . Kamat, and C. Menassa, “Teaching robots to perform construction tasks via learning from demonstration,” inProceedings of the 36th International Symposium on Automation and Robotics in Construction (ISARC), M. Al-Hussein, Ed. Banff, Canada: International Association for Automation and Robotics in Construction (IAARC), May 2019, pp. 1305–1311
2019
-
[10]
Ras: a robotic assembly sys- tem for steel structure erection and assembly,
C.-J. Liang, S.-C. Kang, and M.-H. Lee, “Ras: a robotic assembly sys- tem for steel structure erection and assembly,”International Journal of Intelligent Robotics and Applications, vol. 1, 12 2017
2017
-
[11]
Enhancing construction robot collaboration via multiagent reinforcement learning,
K. Duan and Z. Zou, “Enhancing construction robot collaboration via multiagent reinforcement learning,”Journal of Intelligent Construction, vol. 3, no. 2, p. 9180089, 2025. [Online]. Available: https://www.sciopen.com/article/10.26599/JIC.2025.9180089
-
[12]
Robotic autonomous systems for earthmoving in military applications,
Q. Ha, L. Yen, and C. Balaguer, “Robotic autonomous systems for earthmoving in military applications,”Automation in Construction, vol. 107, p. 102934, 2019. [Online]. Available: https://www. sciencedirect.com/science/article/pii/S0926580518309932
2019
-
[13]
K. Duan and Z. Zou, “Learning from demonstrations: An intuitive vr environment for imitation learning of construction robots,”arXiv preprint arXiv:2305.14584, 2023
-
[14]
Construction robot skill learning for fragile object installation with low-effort demonstration and sample-efficient hierarchical reinforcement learning models,
V . Chandramouli, H. Yu, and C.-J. Liang, “Construction robot skill learning for fragile object installation with low-effort demonstration and sample-efficient hierarchical reinforcement learning models,” in 4th Workshop on Future of Construction at the International Confer- ence on Robotics and Automation (ICRA 2025), 2025
2025
-
[15]
Movement primitives in robotics: A comprehensive survey,
N. B. Gutierrez and W. J. Beksi, “Movement primitives in robotics: A comprehensive survey,”arXiv preprint arXiv:2601.02379, 2025
-
[16]
A task-parameterized probabilistic model with minimal intervention control,
S. Calinon, D. Bruno, and D. G. Caldwell, “A task-parameterized probabilistic model with minimal intervention control,” in2014 IEEE International Conference on Robotics and Automation (ICRA), 2014, pp. 3339–3344
2014
-
[17]
Dynamical movement primitives: Learning attractor models for motor behaviors,
A. J. Ijspeert, J. Nakanishi, H. Hoffmann, P. Pastor, and S. Schaal, “Dynamical movement primitives: Learning attractor models for motor behaviors,”Neural Comput., vol. 25, no. 2, pp. 328–373, Feb
-
[18]
[Online]. Available: http://dx.doi.org/10.1162/NECO a 00393
-
[19]
Screwmimic: Bimanual imitation from human videos with screw space projection,
A. Bahety, P. Mandikal, B. Abbatematteo, and R. Mart ´ın-Mart´ın, “Screwmimic: Bimanual imitation from human videos with screw space projection,” inRobotics: Science and Systems (RSS), 2024, 2024
2024
-
[20]
Learning from demonstrations in human–robot collaborative scenarios: A survey,
A. D. Sosa-Ceron, H. G. Gonzalez-Hernandez, and J. A. Reyes-Avenda˜no, “Learning from demonstrations in human–robot collaborative scenarios: A survey,”Robotics, vol. 11, no. 6, 2022. [Online]. Available: https://www.mdpi.com/2218-6581/11/6/126
2022
-
[21]
Robot learning from human demonstration in virtual reality,
F. Stramandinoli, K. G. Lore, J. R. Peters, P. C. O’Neill, B. M. Nair, R. Varma, J. C. Ryde, J. T. Miller, and K. K. Reddy, “Robot learning from human demonstration in virtual reality,” inProceedings of the 1st international workshop on virtual, augmented, and mixed reality for HRI (VAM-HRI), 2018
2018
-
[22]
Deep imitation learning for complex manipulation tasks from virtual reality teleoperation,
T. Zhang, Z. McCarthy, O. Jow, D. Lee, X. Chen, K. Goldberg, and P. Abbeel, “Deep imitation learning for complex manipulation tasks from virtual reality teleoperation,” in2018 IEEE international conference on robotics and automation (ICRA). Ieee, 2018, pp. 5628– 5635
2018
-
[23]
Holo-dex: Teaching dexterity with immersive mixed reality,
S. P. Arunachalam, I. G ¨uzey, S. Chintala, and L. Pinto, “Holo-dex: Teaching dexterity with immersive mixed reality,”arXiv preprint arXiv:2210.06463, 2022
-
[24]
Extended reality system for robotic learning from human demonstration,
I. Ngui, C. McBeth, G. He, A. C. Santos, L. Soares, M. Morales, and N. M. Amato, “Extended reality system for robotic learning from human demonstration,” in2025 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW), 2025, pp. 1304–1305
2025
-
[25]
Learn- ing personalized human-aware robot navigation using virtual reality demonstrations from a user study,
J. de Heuvel, N. Corral, L. Bruckschen, and M. Bennewitz, “Learn- ing personalized human-aware robot navigation using virtual reality demonstrations from a user study,” in2022 31st IEEE International Conference on Robot and Human Interactive Communication (RO- MAN). IEEE, 2022, pp. 898–905
2022
-
[26]
Learning 6dof grasping using reward-consistent demonstration,
D. Kawakami, R. Ishikawa, M. Roxas, Y . Sato, and T. Oishi, “Learning 6dof grasping using reward-consistent demonstration,”arXiv preprint arXiv:2103.12321, 2021
-
[27]
The benefits of im- mersive demonstrations for teaching robots,
A. Jackson, B. D. Northcutt, and G. Sukthankar, “The benefits of im- mersive demonstrations for teaching robots,” in2019 14th ACM/IEEE International Conference on Human-Robot Interaction (HRI). IEEE, 2019, pp. 326–334
2019
-
[28]
Virtual reality-based expert demon- strations for training construction robots via imitation learning,
L. Huang, W. Cai, and Z. Zou, “Virtual reality-based expert demon- strations for training construction robots via imitation learning,” in Canadian Society of Civil Engineering Annual Conference. Springer, 2022, pp. 55–68
2022
-
[29]
Robotic construction analysis: simulation with virtual reality,
N. Pereira da Silva, S. Eloy, and R. Resende, “Robotic construction analysis: simulation with virtual reality,”Heliyon, vol. 8, no. 10, p. e11039, 2022. [Online]. Available: https://www.sciencedirect.com/ science/article/pii/S2405844022023271
2022
-
[30]
Deep reinforcement learning-based construc- tion robots collaboration for sequential tasks,
L. Huang and Z. Zou, “Deep reinforcement learning-based construc- tion robots collaboration for sequential tasks,” inProceedings of the 1st Future of Construction Workshop at the International Conference on Robotics and Automation (ICRA 2022), Philadelphia, PA, USA, May 2022, pp. 48–51
2022
-
[31]
Enhancing construction robot learning for collaborative and long-horizon tasks using generative adversarial imitation learning,
R. Li and Z. Zou, “Enhancing construction robot learning for collaborative and long-horizon tasks using generative adversarial imitation learning,”Advanced Engineering Informatics, vol. 58, p. 102140, 2023. [Online]. Available: https://www.sciencedirect.com/ science/article/pii/S1474034623002689
2023
-
[32]
Interactive and immersive process-level digital twin for collaborative human-robot construction work,
X. Wang, C.-J. Liang, C. Menassa, and V . Kamat, “Interactive and immersive process-level digital twin for collaborative human-robot construction work,”Journal of Computing in Civil Engineering, vol. 35, 11 2021
2021
-
[33]
K. M. Lynch and F. C. Park,Modern robotics. Cambridge University Press, 2017
2017
-
[34]
Configuration control of redundant manipulators: theory and implementation,
H. Seraji, “Configuration control of redundant manipulators: theory and implementation,”IEEE Transactions on Robotics and Automation, vol. 5, no. 4, pp. 472–490, 1989
1989
-
[35]
Unreal engine,
E. Games, “Unreal engine,” https://www.unrealengine.com/, accessed: April 2025
2025
-
[36]
Meta, “Quest,” https://www.meta.com/quest/, accessed: April 2025
2025
-
[37]
Characterization and control of self-motions in redundant manipulators,
J. Burdick and H. Seraji, “Characterization and control of self-motions in redundant manipulators,” inProceedings of the NASA Conference on Space Telerobotics, Volume 2, 1989
1989
-
[38]
Pybullet, a python module for physics simulation for games, robotics and machine learning,
E. Coumans and Y . Bai, “Pybullet, a python module for physics simulation for games, robotics and machine learning,” 2016
2016
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.