Optimizing Grid-Forming Controls using Relay-based Extremum Seeking to Enhance Transient Performance
Pith reviewed 2026-05-15 01:57 UTC · model grok-4.3
The pith
Extremum seeking tunes droop in grid-forming inverters for real-time optimal transients
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Relay-based extremum seeking control tracks the time-varying optimal droop coefficient for grid-forming inverters by minimizing a multi-objective cost function balancing oscillation energy, frequency nadir, RoCoF, and post-disturbance settling, achieving near-optimal transient performance without an analytical grid model.
What carries the argument
Relay-based extremum seeking controller that perturbs the droop coefficient and estimates the gradient of the multi-objective cost function to drive it toward the minimum.
If this is right
- Convexity of the cost function allows reliable gradient estimation via extremum seeking.
- The controller adapts to time-varying network conditions in real time.
- Near-optimal performance is maintained across different operating points.
- The approach requires no explicit mathematical model of the power grid.
Where Pith is reading between the lines
- Applying the same method to other parameters like voltage droop could provide additional benefits.
- This model-free optimization may reduce engineering effort in commissioning new inverter installations.
- Integration with machine learning for cost function design could improve the approach further.
Load-bearing premise
The chosen multi-objective cost function is convex with respect to the droop parameter.
What would settle it
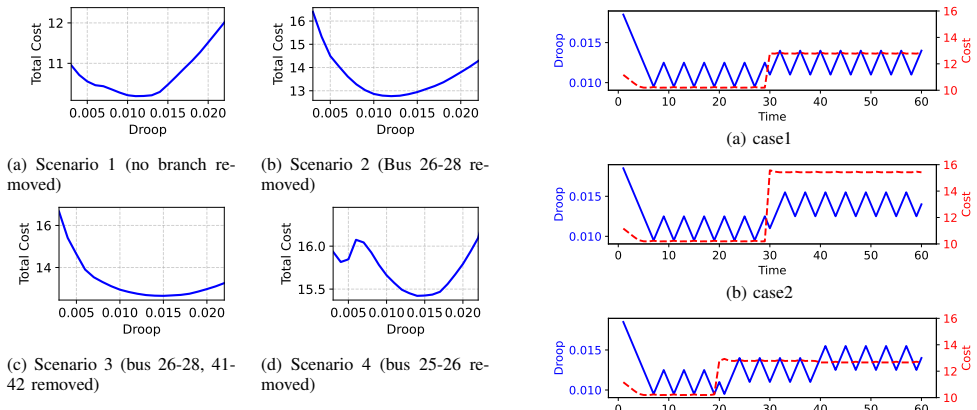
A case where plotting the cost function against the droop coefficient reveals non-convexity, such as multiple local minima, causing the extremum seeking to converge to a suboptimal value.
Figures



read the original abstract
Grid-forming (GFM) inverters are essential for enhancing stability in modern power systems with high penetration of inverter-based resources (IBRs). However, their performance highly depends on control parameters tuning, particularly the active power-frequency droop coefficient. This parameter presents a trade-off among competing objectives, including damping, settling time, rate of change of frequencies (RoCoF) and frequency nadirs. This paper proposes a real-time, adaptive optimization framework based on Extremum Seeking Control (ESC) to dynamically tune the GFM droop gain. A multi-objective cost function balances conflicting performance goals such as oscillation energy, frequency nadir, RoCoF, and post-disturbance settling performance. The approach is validated through numerical simulations on a modified IEEE 68-bus system. Results demonstrate that the cost function is convex with respect to the droop parameter, justifying gradient-based optimization. Furthermore, the ESC algorithm successfully tracks the time-varying optimal droop coefficient in real-time as network conditions change, thereby ensuring robust and near-optimal system performance without requiring an analytical grid model.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a real-time adaptive tuning method for the active power-frequency droop coefficient of grid-forming inverters using relay-based extremum seeking control (ESC). A multi-objective cost function is introduced that trades off oscillation energy, frequency nadir, RoCoF, and post-disturbance settling time. Numerical simulations on a modified IEEE 68-bus system are presented to demonstrate that the cost is convex in the droop gain and that the ESC algorithm tracks the time-varying optimum in real time as network conditions change, without requiring an explicit grid model.
Significance. If the reported convexity and tracking behavior generalize, the work supplies a practical model-free technique for online optimization of GFM controls that could improve transient stability margins in high-IBR systems. The IEEE 68-bus simulation results constitute concrete evidence of real-time adaptation; this is a clear strength of the contribution.
major comments (2)
- [Abstract] Abstract: the claim that numerical results on the modified IEEE 68-bus system demonstrate convexity of the multi-objective cost with respect to the droop coefficient is stated without any accompanying sensitivity study; when loads, topology, or inertia vary, the swing dynamics can shift dominant modes and potentially introduce local minima, directly threatening the global-tracking guarantee asserted for the ESC algorithm.
- [Validation results] Validation results (numerical section): while the ESC is shown to track the optimum under the simulated disturbances, no quantitative bounds on tracking error, convergence rate, or robustness to measurement noise are provided, leaving the performance claims dependent solely on the particular simulation trajectories.
minor comments (2)
- [Cost function definition] The weights appearing in the multi-objective cost function are treated as free parameters; their specific numerical values and any systematic selection procedure should be stated explicitly to allow reproduction of the reported convexity.
- [Figures] Figure captions and axis labels for the cost-versus-droop plots should include units and the exact disturbance scenario under which each curve was generated.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which help strengthen the presentation of our work. We address each major comment below and indicate the revisions we will make.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim that numerical results on the modified IEEE 68-bus system demonstrate convexity of the multi-objective cost with respect to the droop coefficient is stated without any accompanying sensitivity study; when loads, topology, or inertia vary, the swing dynamics can shift dominant modes and potentially introduce local minima, directly threatening the global-tracking guarantee asserted for the ESC algorithm.
Authors: We agree that the convexity claim rests on numerical evaluation for the specific modified IEEE 68-bus system and tested disturbances. While our simulations already cover multiple operating points that alter effective inertia and load, we did not include an explicit sensitivity study. In the revised manuscript we will add a dedicated subsection that sweeps load levels and inertia values, plots the resulting cost surfaces, and verifies that the cost remains convex (no local minima) over the examined range. This will directly support the applicability of the ESC tracking guarantee within the validated operating envelope. revision: partial
-
Referee: [Validation results] Validation results (numerical section): while the ESC is shown to track the optimum under the simulated disturbances, no quantitative bounds on tracking error, convergence rate, or robustness to measurement noise are provided, leaving the performance claims dependent solely on the particular simulation trajectories.
Authors: We concur that quantitative performance metrics are needed to make the validation more rigorous. In the revised numerical section we will report the maximum and RMS tracking error, average and worst-case convergence time across repeated disturbance scenarios, and the degradation in tracking performance when Gaussian measurement noise is added at realistic levels. These statistics will provide explicit bounds and reduce reliance on individual trajectories. revision: yes
Circularity Check
No circularity: real-time ESC tracking uses direct simulation metrics without reduction to fitted inputs
full rationale
The paper's derivation relies on applying relay-based extremum seeking to a multi-objective cost (oscillation energy + nadir + RoCoF + settling) evaluated from time-domain simulations. Convexity is asserted via numerical results on the modified IEEE 68-bus system rather than by definition or self-citation. The central claim—that ESC tracks the time-varying optimal droop without an analytical model—follows from the standard ESC gradient-ascent mechanism applied to observed signals and is validated externally through simulation, not forced by construction from the inputs. No self-definitional steps, fitted-input predictions, or load-bearing self-citations appear in the abstract or described approach. The result is self-contained against the simulation benchmark.
Axiom & Free-Parameter Ledger
free parameters (1)
- weights in the multi-objective cost function
axioms (1)
- domain assumption The cost function is convex with respect to the droop parameter
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquationwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
The total cost is computed as a weighted sum... Jtotal(t)=w1 Eavg + w2 Rmean + w3 Rmax + w4 Ffinal... Results demonstrate that the cost function is convex with respect to the droop parameter
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
W. Du, Z. Chen, K. P. Schneider, R. H. Lasseter, S. P. Nandanoori, F. K. Tuffner, and S. Kundu, “A Comparative Study of Two Widely Used Grid-forming Droop Controls on Microgrid Small-Signal Sta- bility,”IEEE Journal of Emerging and Selected Topics in Power Electronics, vol. 8, no. 2, pp. 963–975, 2019
work page 2019
-
[2]
Grid-forming invert- ers: A critical asset for the power grid,
R. H. Lasseter, Z. Chen, and D. Pattabiraman, “Grid-forming invert- ers: A critical asset for the power grid,”IEEE Journal of Emerging and Selected Topics in Power Electronics, vol. 8, no. 2, pp. 925–935, 2019
work page 2019
-
[4]
W. Duet al., “A Comparative Study of Two Widely Used Grid- Forming Droop Controls on Microgrid Small-Signal Stability,”IEEE Journal of Emerging and Selected Topics in Power Electronics, vol. 8, no. 2, pp. 963–975, 2020
work page 2020
-
[5]
Synthesizing Virtual Oscillators to Control Islanded Inverters,
B. B. Johnsonet al., “Synthesizing Virtual Oscillators to Control Islanded Inverters,”IEEE Transactions on Power Electronics, vol. 31, no. 8, pp. 6002–6015, 2016
work page 2016
-
[6]
K. Chatterjee, S. Samanta, and N. R. Chaudhuri, “Insights Into Dissipating Energy-Based Source/Sink Characterization of TCSC and STATCOM for Low-Frequency Oscillations,”IEEE Transactions on Power Delivery, vol. 38, no. 2, pp. 1426–1439, 2023
work page 2023
-
[7]
J. Liu, Y . Miura, and T. Ise, “Comparison of Dynamic Characteris- tics Between Virtual Synchronous Generator and Droop Control in Inverter-Based Distributed Generators,”IEEE Transactions on Power Electronics, vol. 31, no. 5, pp. 3600–3611, 2016
work page 2016
-
[8]
Identifying parameter space for robust stability in nonlinear networks: A microgrid application,
S. Kunduet al., “Identifying parameter space for robust stability in nonlinear networks: A microgrid application,” in2019 American Control Conference (ACC). IEEE, 2019, pp. 3111–3116
work page 2019
-
[9]
Distributed small-signal stability conditions for inverter-based unbalanced microgrids,
S. P. Nandanooriet al., “Distributed small-signal stability conditions for inverter-based unbalanced microgrids,”IEEE Transactions on Power Systems, vol. 35, no. 5, pp. 3981–3990, 2020
work page 2020
-
[10]
Iden- tification of stability regions in inverter-based microgrids,
A. Gorbunov, J. C.-H. Peng, J. W. Bialek, and P. V orobev, “Iden- tification of stability regions in inverter-based microgrids,”IEEE Transactions on Power Systems, vol. 37, no. 4, pp. 2613–2623, 2021
work page 2021
-
[11]
Decentralized stability criteria for grid-forming control in inverter-based power systems,
Z. Siahaanet al., “Decentralized stability criteria for grid-forming control in inverter-based power systems,” in2024 IEEE Power & Energy Society General Meeting (PESGM). IEEE, 2024
work page 2024
-
[12]
L. Ding, X. Lu, and J. Tan, “Comparative small-signal stability analysis of grid-forming and grid-following inverters in low-inertia power systems,” inIECON 2021 – 47th Annual Conference of the IEEE Industrial Electronics Society, 2021, pp. 1–6
work page 2021
-
[13]
Stability assessment and guided droop design for grid-forming inverter resources in bulk grid,
R. R. Hossain, K. Chatterjee, K.-B. Kwon, S. Mukherjee, S. Kundu, M. Elizondo, and V . Adetola, “Stability assessment and guided droop design for grid-forming inverter resources in bulk grid,”IEEE PES General Meeting 2025
work page 2025
-
[14]
Kundur,Power System Stability and Control
P. Kundur,Power System Stability and Control. McGraw-Hill, 1994
work page 1994
-
[15]
Model Specification of Droop-Controlled, Grid- Forming Inverters (REGFM A1),
W. Duet al., “Model Specification of Droop-Controlled, Grid- Forming Inverters (REGFM A1),” Pacific Northwest National Labo- ratory (PNNL), Richland, W A, Tech. Rep. PNNL-35110, 2023
work page 2023
-
[16]
Stability of extremum seeking feed- back for general nonlinear dynamic systems,
M. Krstic and H.-H. Wang, “Stability of extremum seeking feed- back for general nonlinear dynamic systems,”Automatica-Kidlington, vol. 36, no. 4, pp. 595–602, 2000
work page 2000
-
[17]
T. I. Salsbury, T. Terrill, J. Goddard, M. G. Yu, T. Yoder, and X. Duane, “A general purpose real-time optimization strategy applied to minimizing simultaneous heating and cooling in buildings,” in American Control Conference, 2023
work page 2023
-
[18]
Self-perturbing extremum-seeking controller with adaptive gain,
T. I. Salsbury, J. M. House, and C. F. Alcala, “Self-perturbing extremum-seeking controller with adaptive gain,”Control Engineer- ing Practice, vol. 101, p. 104456, 2020
work page 2020
-
[19]
A new simple-to-configure self-perturbing multivariable extremum-seeking controller,
T. I. Salsbury and M. G. Yu, “A new simple-to-configure self-perturbing multivariable extremum-seeking controller,”IF AC- PapersOnLine, vol. 58, no. 28, pp. 756–761, 2024
work page 2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.