Recognition: no theorem link
Reactive Planning based Control for Mobile Robots in Obstacle-Cluttered Environments
Pith reviewed 2026-05-15 02:45 UTC · model grok-4.3
The pith
Mobile robots reach targets collision-free in cluttered spaces using only partial maps by locally adjusting a reference path and tracking it adaptively.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The reactive planning based control strategy (RPCS) combines a reactive planning strategy that modifies the reference trajectory locally using partial obstacle information with an adaptive tracking control strategy that follows the modified trajectory through discretization, thereby guaranteeing collision-free motion from initial to target position.
What carries the argument
The RPCS formed by integrating the reactive planning strategy for local trajectory modification based on partial environment data with the adaptive tracking controller that uses discretization to handle modifications.
If this is right
- The robot maintains collision-free motion to the target when only partial environment information is available.
- Local path changes from obstacle detection can be followed without loss of stability through the discretization-based adaptive controller.
- The strategy applies directly to cluttered environments where complete sensing is impractical.
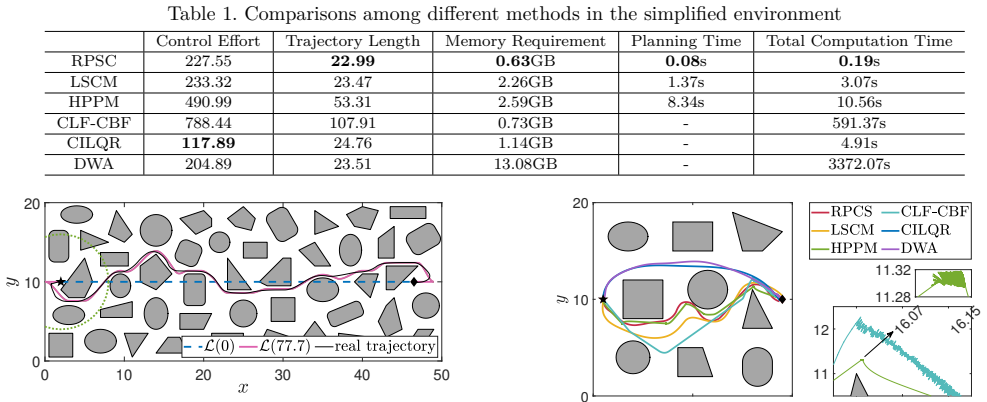
- Numerical examples confirm that the combined reactive planning and adaptive tracking reaches goals safely.
Where Pith is reading between the lines
- The discretization step may lower the computational demands enough for onboard processors in small robots.
- If the reactive planner updates frequently, the same structure could handle slowly moving obstacles without redesign.
- The reference trajectory could be replaced by a more complex nominal path while keeping the local-modification layer intact.
Load-bearing premise
Local modifications made by the reactive planner can always be tracked stably by the adaptive controller without causing instability or preventing the robot from reaching the target.
What would settle it
A numerical simulation or hardware test in which the robot using the proposed strategy collides with an obstacle or fails to arrive at the target despite receiving the same partial information that the reactive planner is designed to use.
Figures




read the original abstract
This paper addresses the motion control problem for mobile robots in obstacle-cluttered environments. The mobile robot has partial environment information only, and aims to move from an initial position to a target position without collisions. For this purpose, a reactive planning based control strategy (RPCS) is proposed. First, the initial and target positions are connected as a reference trajectory. Then, a reactive planning strategy (RPS) is developed to ensure the collision avoidance by modifying the reference trajectory locally based on the partial environment information. Next, an adaptive tracking control strategy (ATCS) is proposed to track the reference trajectory with potentially local modifications via the discretization techniques. Finally, the RPS and ATCS are combined to establish the RPCS, whose efficacy and advantages are illustrated by numerical examples.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a reactive planning based control strategy (RPCS) for mobile robots navigating from an initial to a target position in obstacle-cluttered environments using only partial information. It first connects the positions with a reference trajectory, then applies a reactive planning strategy (RPS) to locally modify the trajectory for collision avoidance based on detected obstacles, and uses an adaptive tracking control strategy (ATCS) discretized from a continuous adaptive law to follow the modified reference. The combined RPCS is illustrated through numerical examples demonstrating collision-free motion.
Significance. If the tracking guarantees hold, the integrated RPS-ATCS framework would offer a practical method for safe navigation under partial observability, potentially bridging reactive planning and adaptive control in a way that improves robustness over purely global planners or simple reactive methods. The numerical examples provide initial evidence of feasibility on specific scenarios, but the lack of formal bounds or proofs restricts the result to illustrative rather than general applicability.
major comments (2)
- [§4] §4 (ATCS discretization): the discretization of the continuous adaptive law provides no explicit tracking-error bound, Lyapunov analysis, or dwell-time condition to guarantee that the robot trajectory remains inside the free space when RPS inserts abrupt local detours; this directly undermines the central collision-free claim under partial information.
- [§5] §5 (RPCS integration): no general condition is derived relating discretization step size, adaptation gain, or sensing range to the preservation of collision avoidance, leaving the weakest assumption (stable tracking of RPS modifications) unaddressed beyond specific numerical cases.
minor comments (2)
- [Abstract and §2] The abstract and §2 could clarify the kinematic model of the mobile robot and the exact form of the partial environment information (e.g., sensor range and noise model).
- [§6] Numerical examples in §6 would benefit from reporting quantitative metrics such as minimum distance to obstacles and tracking error statistics across multiple runs rather than qualitative success illustrations.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major point below and indicate planned revisions to strengthen the formal aspects of the RPCS framework.
read point-by-point responses
-
Referee: [§4] §4 (ATCS discretization): the discretization of the continuous adaptive law provides no explicit tracking-error bound, Lyapunov analysis, or dwell-time condition to guarantee that the robot trajectory remains inside the free space when RPS inserts abrupt local detours; this directly undermines the central collision-free claim under partial information.
Authors: We agree that the discretization step in §4 lacks an explicit tracking-error bound and dwell-time condition for abrupt RPS detours. In the revision we will add a discrete-time error analysis (based on the continuous Lyapunov function) together with a sufficient condition on the sampling period that keeps the actual trajectory inside the free space detected by the partial sensor range. revision: yes
-
Referee: [§5] §5 (RPCS integration): no general condition is derived relating discretization step size, adaptation gain, or sensing range to the preservation of collision avoidance, leaving the weakest assumption (stable tracking of RPS modifications) unaddressed beyond specific numerical cases.
Authors: We acknowledge that §5 currently relies on numerical validation rather than general conditions. We will insert a new remark deriving explicit relations among discretization step size, adaptation gain, and minimum sensing range that guarantee the integrated RPS-ATCS remains collision-free; these relations will be illustrated with additional simulation cases. revision: yes
Circularity Check
No significant circularity in the RPCS derivation chain
full rationale
The paper constructs RPCS by first defining a reference trajectory between initial and target positions, then applying RPS for local modifications using partial obstacle data, followed by ATCS via discretization to track the (possibly modified) reference, and finally combining them. No equation or step reduces a claimed result to a fitted parameter defined by the outcome itself, nor invokes self-citation for a uniqueness theorem or smuggles an ansatz. The strategies are built from standard control primitives with efficacy shown via numerical examples rather than by construction. The derivation remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Mobile-robot dynamics permit stable tracking of locally modified trajectories via discretization-based adaptive control.
Reference graph
Works this paper leans on
-
[1]
Autonomous Mobile Robots and Multi-Robot Systems: Motion-Planning, Communication, and Swarming , author=. 2019 , publisher=
work page 2019
-
[2]
Robust control barrier functions for constrained stabilization of nonlinear systems , journal =. 2018 , issn =
work page 2018
-
[3]
Autonomous Driving Motion Planning With Constrained Iterative
Chen, Jianyu and Zhan, Wei and Tomizuka, Masayoshi , journal=. Autonomous Driving Motion Planning With Constrained Iterative. 2019 , volume=
work page 2019
-
[4]
Park, Jungwon and Kim, Dabin and Kim, Gyeong Chan and Oh, Dahyun and Kim, H. Jin , journal=. Online Distributed Trajectory Planning for Quadrotor Swarm With Feasibility Guarantee Using Linear Safe Corridor , year=
-
[5]
Chen, Yufan and Cutler, Mark and How, Jonathan P. , booktitle=. Decoupled multiagent path planning via incremental sequential convex programming , year=
-
[6]
Sakcak, Basak and Bascetta, Luca and Ferretti, Gianni and Prandini, Maria , journal=. An Admissible Heuristic to Improve Convergence in Kinodynamic Planners Using Motion Primitives , year=
-
[7]
Hybrid Path Planning Based on Safe
Zhong, Xunyu and Tian, Jun and Hu, Huosheng and Peng, Xiafu , journal=. Hybrid Path Planning Based on Safe. 2020 , volume=
work page 2020
-
[8]
Sampling-based algorithms for optimal motion planning , year=
Sertac Karaman and Emilio Frazzoli , journal=. Sampling-based algorithms for optimal motion planning , year=
-
[9]
Khatib, O , title =. Int. J. Rob. Res. , pages =. 1986 , volume =
work page 1986
-
[10]
Fox, D. and Burgard, W. and Thrun, S. , journal=. The dynamic window approach to collision avoidance , year=
-
[11]
Jing Chen and Tianbo Liu and Shaojie Shen , booktitle=. Online generation of collision-free trajectories for quadrotor flight in unknown cluttered environments , year=
-
[12]
Zinage, Vrushabh and Arul, Senthil Hariharan and Manocha, Dinesh and Ghosh, Satadal , journal=. 3. 2023 , volume=
work page 2023
-
[13]
Liu, Sikang and Watterson, Michael and Mohta, Kartik and Sun, Ke and Bhattacharya, Subhrajit and Taylor, Camillo J. and Kumar, Vijay , journal=. Planning Dynamically Feasible Trajectories for Quadrotors Using Safe Flight Corridors in 3-. 2017 , volume=
work page 2017
-
[14]
Li, Yulin and Tang, Xindong and Chen, Kai and Zheng, Chunxin and Liu, Haichao and Ma, Jun , journal=. Geometry-Aware Safety-Critical Local Reactive Controller for Robot Navigation in Unknown and Cluttered Environments , year=
-
[15]
Combining Motion Planner and Deep Reinforcement Learning for
Xue, Yuntao and Chen, Weisheng , journal=. Combining Motion Planner and Deep Reinforcement Learning for. 2024 , volume=
work page 2024
-
[16]
Oleynikova, Helen and Taylor, Zachary and Siegwart, Roland and Nieto, Juan , journal=. Safe Local Exploration for Replanning in Cluttered Unknown Environments for Microaerial Vehicles , year=
-
[17]
Tracking Control for a Cushion Robot Based on Fuzzy Path Planning With Safe Angular Velocity , year=
Sun, Ping and Zhuang, Yu , journal=. Tracking Control for a Cushion Robot Based on Fuzzy Path Planning With Safe Angular Velocity , year=
-
[18]
Scalable distributed algorithms for multi-robot near-optimal motion planning , journal =. 2022 , issn =
work page 2022
-
[19]
Automatic Navigation of Microswarms for Dynamic Obstacle Avoidance , year=
Liu, Yuezhen and Chen, Hui and Zou, Qian and Du, Xingzhou and Wang, Yibin and Yu, Jiangfan , journal=. Automatic Navigation of Microswarms for Dynamic Obstacle Avoidance , year=
-
[20]
Nonlinear Systems , author=
-
[21]
Classical Mechanics with Mathematica , author=
-
[22]
Liu, Yonggang and Zhou, Bobo and Wang, Xiao and Li, Liang and Cheng, Shuo and Chen, Zheng and Li, Guang and Zhang, Lu , journal=. Dynamic Lane-Changing Trajectory Planning for Autonomous Vehicles Based on Discrete Global Trajectory , year=
- [23]
-
[24]
An Introduction to Polynomial and Semi-Algebraic Optimization , author=. 2015 , publisher=
work page 2015
-
[25]
Kochdumper, Niklas and Gruber, Felix and Schürmann, Bastian and Gaßmann, Victor and Klischat, Moritz and Althof, Matthias , booktitle=
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.