Recognition: no theorem link
ForcingDAS: Unified and Robust Data Assimilation via Diffusion Forcing
Pith reviewed 2026-05-15 02:34 UTC · model grok-4.3
The pith
A single diffusion model learns joint trajectory priors to unify filtering and smoothing in data assimilation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
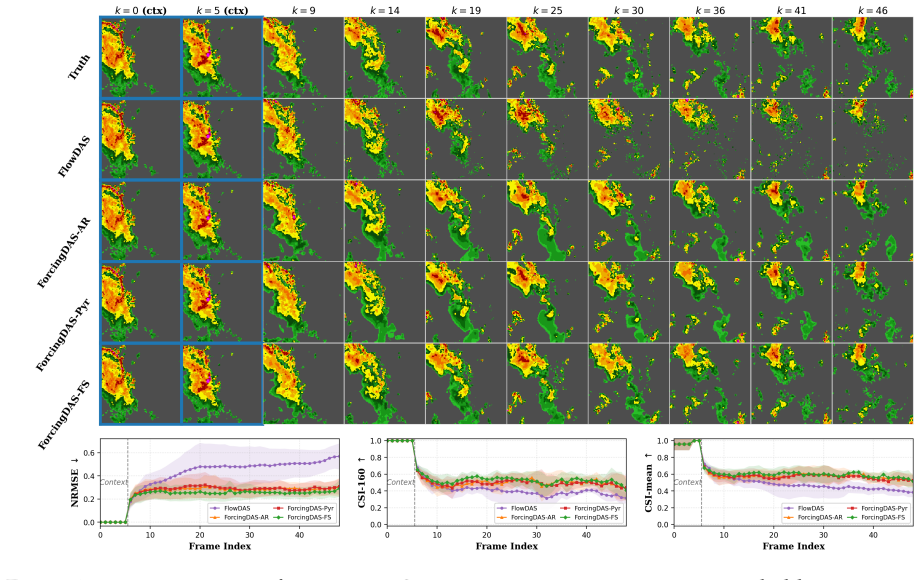
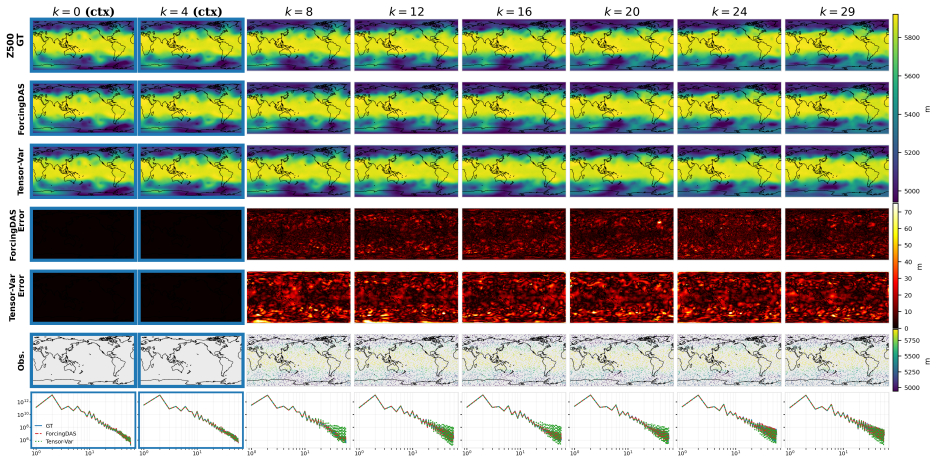
ForcingDAS builds a diffusion model in which each frame of a trajectory receives its own independent noise level. This produces a joint-trajectory prior rather than a sequence of one-step transitions, so that a single trained network can execute nowcasting, fixed-lag smoothing, or full-batch reanalysis simply by changing the inference schedule. On 2D Navier-Stokes vorticity, precipitation nowcasting, and global weather estimation the same model matches or exceeds both classical and learned baselines specialized to each regime.
What carries the argument
Diffusion Forcing with independent per-frame noise levels, which replaces sequential transition models with a joint-trajectory prior.
If this is right
- One trained network can be used for nowcasting, fixed-lag smoothing, and batch reanalysis without any retraining.
- Error accumulation is reduced over long horizons when observations are only partial slices of a higher-dimensional state.
- Performance is competitive with or better than regime-specific baselines, with the largest improvements on real-world weather data.
- The inference schedule alone determines the operating point on the filtering-to-smoothing spectrum.
Where Pith is reading between the lines
- Operational weather centers could maintain a single assimilation model instead of separate nowcast and reanalysis systems.
- The same per-frame noise construction may transfer to other high-dimensional dynamical systems such as ocean or engineering simulations.
- Diffusion-based priors could replace traditional sequential predictors in any assimilation task where observations are non-Markovian.
Load-bearing premise
That assigning independent noise to each frame during training will let the model learn the full joint distribution over trajectories and thereby avoid accumulating errors on non-Markovian observations.
What would settle it
A long-horizon test on real atmospheric data in which the single model accumulates larger errors than a dedicated smoothing baseline or loses accuracy when the inference schedule is switched from filtering to batch reanalysis.
Figures


read the original abstract
Data assimilation (DA) estimates the state of an evolving dynamical system from noisy, partial observations, and is widely used in scientific simulation as well as weather and climate science. In practice, filtering methods rely on frame-to-frame transition models. However, these models are fragile when observations are non-Markovian (when they form only a partial slice of a higher-dimensional latent state as in real-world weather data): they tend to accumulate errors over long horizons. At the same time, learned DA methods typically commit to a single regime, either filtering (nowcasting, real-time forecasting) or smoothing (retrospective reanalysis), which splits what should be a shared prior across application-specific pipelines. To address both issues, we introduce ForcingDAS, a unified and robust DA framework. Built on Diffusion Forcing with an independent noise level assigned to each frame, ForcingDAS learns a joint-trajectory prior instead of frame-to-frame transitions. This allows it to capture long-horizon temporal dependencies and reduce error accumulation. In addition, the same trained model spans the full filtering to smoothing spectrum at inference time. Specifically, nowcasting, fixed-lag smoothing, and batch reanalysis are selected through the inference schedule alone, without retraining. We evaluate ForcingDAS on 2D Navier-Stokes vorticity, precipitation nowcasting, and global atmospheric state estimation. Across all settings, a single model is competitive with or outperforms both learned and classical baselines that are specialized for individual regimes, with the largest gains observed on real-world weather benchmarks.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces ForcingDAS, a unified data assimilation framework built on Diffusion Forcing. By assigning independent noise levels to each frame, the method learns a joint-trajectory prior rather than frame-to-frame transitions. This prior is claimed to capture long-horizon dependencies and mitigate error accumulation for non-Markovian observations. At inference, the same trained model performs nowcasting (filtering), fixed-lag smoothing, and batch reanalysis simply by changing the noise schedule, without retraining. Experiments on 2D Navier-Stokes vorticity, precipitation nowcasting, and global atmospheric reanalysis report that one model is competitive with or outperforms regime-specific learned and classical baselines, with the largest gains on real-world weather data.
Significance. If the central claims hold, the work provides a practical unification of filtering and smoothing pipelines in data assimilation, which is valuable for weather and climate applications where observations are partial and non-Markovian. The diffusion-based joint prior offers a mechanism to reduce long-horizon error accumulation without committing to a single regime at training time. Reproducible code and parameter-free schedule selection at inference are noted strengths that would support adoption if the performance gains are confirmed with full ablations.
major comments (2)
- [§4.3] §4.3 (weather benchmark): the reported gains over specialized baselines are the largest and most load-bearing for the unified-model claim, yet the manuscript provides only aggregate metrics without per-variable error breakdowns or long-horizon rollout statistics; this leaves open whether the joint prior actually prevents accumulation or simply benefits from the diffusion schedule on this particular dataset.
- [§3.2] §3.2, inference schedule definition: the claim that conditioning via schedule choice alone spans the full filtering-to-smoothing spectrum is central, but the text does not quantify how the per-frame noise schedule interacts with the observation mask for non-Markovian cases; a concrete example or ablation showing failure modes when the schedule is misspecified would strengthen the argument.
minor comments (3)
- Notation for the per-frame noise schedule (e.g., β_t) is introduced without an explicit comparison table to standard DDPM schedules; adding this would improve clarity.
- Figure 3 (qualitative weather fields) lacks error maps or difference plots against ground truth, making it difficult to assess where the method improves over baselines.
- The abstract states 'competitive with or outperforms' but the results section would benefit from a single summary table aggregating all three benchmarks with statistical significance markers.
Simulated Author's Rebuttal
We thank the referee for the positive assessment and constructive comments. We address each major point below and will revise the manuscript accordingly to provide stronger supporting evidence.
read point-by-point responses
-
Referee: [§4.3] §4.3 (weather benchmark): the reported gains over specialized baselines are the largest and most load-bearing for the unified-model claim, yet the manuscript provides only aggregate metrics without per-variable error breakdowns or long-horizon rollout statistics; this leaves open whether the joint prior actually prevents accumulation or simply benefits from the diffusion schedule on this particular dataset.
Authors: We agree that per-variable breakdowns and explicit long-horizon statistics would better isolate the contribution of the joint prior. In the revised manuscript we will add a table of per-variable RMSE (temperature, zonal/meridional wind, humidity) on the global reanalysis task together with error-growth curves over 48-hour rollouts for ForcingDAS versus the strongest baselines. These additions will show that error accumulation is measurably slower under the joint-trajectory prior. revision: yes
-
Referee: [§3.2] §3.2, inference schedule definition: the claim that conditioning via schedule choice alone spans the full filtering-to-smoothing spectrum is central, but the text does not quantify how the per-frame noise schedule interacts with the observation mask for non-Markovian cases; a concrete example or ablation showing failure modes when the schedule is misspecified would strengthen the argument.
Authors: We will expand §3.2 with a worked numerical example that traces how a chosen per-frame noise vector interacts with a partial, non-Markovian observation mask. We will also add a short ablation that applies a filtering-oriented schedule to a smoothing task (and vice versa) and reports the resulting degradation, thereby quantifying the sensitivity of the unification mechanism. revision: yes
Circularity Check
No significant circularity in the derivation chain
full rationale
The paper introduces ForcingDAS as an extension of Diffusion Forcing that assigns independent noise levels per frame to learn a joint-trajectory prior, enabling a single model to handle filtering through smoothing via inference schedule alone. No equations or claims reduce by construction to fitted parameters, self-definitions, or load-bearing self-citations; the central result is presented as a technical unification with independent empirical support from evaluations on Navier-Stokes, precipitation nowcasting, and real-world weather benchmarks. The derivation remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Diffusion processes can model complex joint distributions over trajectories when noise is applied independently per frame
Reference graph
Works this paper leans on
-
[1]
Appa: Bending Weather Dynamics with Latent Diffusion Models for Global Data Assimilation
url:https://openreview.net/forum?id=28Essvtvkw. [And+25] Gérôme Andry, Sacha Lewin, François Rozet, Omer Rochman, Victor Mangeleer, Matthias Pirlet, Elise Faulx, Marilaure Grégoire, and Gilles Louppe. “Appa: Bending Weather Dynamics with Latent Diffusion Models for Global Data Assimilation”. In: arXiv(2025).doi:10.48550/arxiv.2504.18720. [BDV23] Arundhuti...
-
[2]
Sharp failure rates for the bootstrap particle filter in high dimensions
2024, pp. 4965–4987. 13 [BLB08] Peter Bickel, Bo Li, and Thomas Bengtsson. “Sharp failure rates for the bootstrap particle filter in high dimensions”. In:Pushing the limits of contemporary statistics: Contributions in honor of Jayanta K. Ghosh. Vol
work page 2024
-
[3]
Closed-loop turbulence control: Progress and challenges
Institute of Mathematical Statistics, 2008, pp. 318–330. [BN15] Steven L Brunton and Bernd R Noack. “Closed-loop turbulence control: Progress and challenges”. In:Applied Mechanics Reviews67.5 (2015), p. 050801. [Boc+15] Marc Bocquet, H Elbern, H Eskes, M Hirtl, R Žabkar, GR Carmichael, J Flemming, A Inness, M Pagowski, JL Pérez Camaño, et al. “Data assimi...
work page 2008
-
[4]
Dataassimilation in the geosciences: An overview of methods, issues, and perspectives
2025, pp. 3360–3385. [Car+18] AlbertoCarrassi,MarcBocquet,LaurentBertino,andGeirEvensen.“Dataassimilation in the geosciences: An overview of methods, issues, and perspectives”. In:Wiley Interdisciplinary Reviews: Climate Change9.5 (2018), e535. [Che+24a] Boyuan Chen, Diego Martí Monsó, Yilun Du, Max Simchowitz, Russ Tedrake, and Vincent Sitzmann. “Diffusi...
-
[5]
Cabnet: Category attention block for imbalanced diabetic retinopathy grading
[GC99] Gregory Gaspari and Stephen E Cohn. “Construction of correlation functions in two and three dimensions”. In:Quarterly Journal of the Royal Meteorological Society125.554 (1999), pp. 723–757. [Gee+18] AlanJGeer,KatrinLonitz,PeterWeston,MasahiroKazumori,KozoOkamoto,Yanqiu Zhu, Emily Huichun Liu, Andrew Collard, William Bell, Stefano Migliorini, et al....
work page doi:10.1109/tmi 1999
-
[6]
Mani- fold preserving guided diffusion
IET. 1993, pp. 107–113. [He+24] YutongHe,NaokiMurata,Chieh-HsinLai,YuhtaTakida,ToshimitsuUesaka,Dongjun Kim, WeiHsiang Liao, Yuki Mitsufuji, Zico Kolter, Ruslan Salakhutdinov, et al. “Mani- fold preserving guided diffusion”. In:International Conference on Learning Representa- tions. Vol
work page 1993
-
[7]
2024, pp. 44819–44850. 15 [Her+20] Hans Hersbach, Bill Bell, Paul Berrisford, Shoji Hirahara, András Horányi, Joaquín Muñoz-Sabater, Julien Nicolas, Carole Peubey, Raluca Radu, Dinand Schepers, et al. “The ERA5 global reanalysis”. In:Quarterly Journal of the Royal Meteorological Society 146.730 (2020), pp. 1999–2049. [Her00] Hans Hersbach. “Decomposition ...
work page 2024
-
[8]
[Kál60] Rudolf Emil Kálmán. “A new approach to linear filtering and prediction problems”. In:Journal of Basic Engineering82.1 (1960), pp. 35–45. [Li+24] Xiang Li, Soo Min Kwon, Ismail R Alkhouri, Saiprasad Ravishanka, and Qing Qu. “Decoupled Data Consistency with Diffusion Purification for Image Restoration”. In: arXiv preprint arXiv:2403.06054(2024). [Li...
-
[9]
[Li+26a] XiangLi,YixuanJia,XiaoLi,JeffreyAFessler,RongrongWang,andQingQu.“MCLR: ImprovingConditionalModelinginVisualGenerativeModelsviaInter-ClassLikelihood- Ratio Maximization and Establishing the Equivalence between Classifier-Free Guid- ance and Alignment Objectives”. In:arXiv preprint arXiv:2603.22364(2026). [Li+26b] Xiao Li, Zekai Zhang, Xiang Li, Si...
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[10]
[LSZ15] Kody Law, Andrew Stuart, and Kostas Zygalakis. “Data assimilation”. In:Cham, Switzerland: Springer214 (2015), p
work page 2015
-
[11]
16 [MCH24] Rambod Mojgani, Ashesh Chattopadhyay, and Pedram Hassanzadeh. “Interpretable structural model error discovery from sparse assimilation increments using spectral bias-reduced neural networks: A quasi-geostrophic turbulence test case”. In:Journal of Advances in Modeling Earth Systems16.3 (2024), e2023MS004033. [PX23] William Peebles and Saining X...
work page 2024
-
[12]
Spatiotemporal diffusion model with paired sampling for accelerated cardiac cine MRI
[Qiu+24] ShihanQiu,ShaoyanPan,YikangLiu,LinZhao,JianXu,QiLiu,TerrenceChen,EricZ Chen, Xiao Chen, and Shanhui Sun. “Spatiotemporal diffusion model with paired sampling for accelerated cardiac cine MRI”. In:arXiv preprint arXiv:2403.08758(2024). [Rab05] Florence Rabier. “Overview of global data assimilation developments in numerical weather-prediction centr...
-
[13]
Tensor-Var: Efficient Four-Dimensional Variational Data Assimila- tion
[Yan+25] Yiming Yang, Xiaoyuan Cheng, Daniel Giles, Sibo Cheng, Yi He, Xiao Xue, Boli Chen, and Yukun Hu. “Tensor-Var: Efficient Four-Dimensional Variational Data Assimila- tion”. In:International Conference on Machine Learning. 2025.url:https://openreview. net/forum?id=bXilZCSueG. [Zha+23] Zhehao Zhang, Jiaming Liu, Deshan Yang, Ulugbek S. Kamilov, and G...
-
[14]
Per-variable, latitude-weighted CRPS and ensemble-mean NRMSE in z-score-normalized data space (per-channel std≈1); lower is better for both. Per lead time ℎ∈{1,2,3}and as a mean over the three lead times. This subsection expands on the motivation for CAT (§3.1) and reports its effect on probabilistic forecasting under the protocol above. Thetrain–testgap....
work page 2080
-
[15]
Variable𝜇 𝑐 𝜎𝑐 Units Z50053 859.76 3,137.37m 2s−2 T850273.13 15.03K U10−0.148 5.249ms −1 V10−0.224 4.410ms −1 Table S9: Per-channel climatological mean𝜇𝑐 and standard deviation𝜎𝑐 (in raw physical units), computed from the ERA5 1979–2015 training period. These are the conversion factors between the data space (where the model and the observation operator a...
work page 1979
-
[16]
Notation.Let ˆ𝑠𝑡,𝑏,𝑖,𝑗 denote the assimilated value at frame𝑡 of trajectory𝑏, longitude index𝑗∈ {1, . . . , 𝐽}, latitude index𝑖∈{1, . . . , 𝐼}; let𝑠𝑡,𝑏,𝑖,𝑗 denote the ERA5 reference; and let𝑐𝑡,𝑏,𝑖 denote the per-grid-point, per-time climatology (varying with day-of-year and hour-of-day). All quantities are in z-score-normalized data space (§S6.3.1). Latit...
work page 1990
-
[17]
This implicitly specifies 𝑩=𝜎 2 𝑏 𝑲𝑲⊤, a spatially correlated covariance whose off-diagonal structure allows observations to inform nearby unobserved grid points through the correlation length scale of𝐾. We use per- variable isotropic Gaussian kernels with length scalesℓ=(8, 6, 5, 5)grid points for (Z500, T850, U10, V10) respectively, reflecting the decre...
work page 1979
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.