Recognition: 2 theorem links
· Lean TheoremCapacity Characterization and Formation Optimization for Multi-User MIMO Communications with UAV Swarm
Pith reviewed 2026-05-15 02:07 UTC · model grok-4.3
The pith
Optimal UAV swarm placements let an M-antenna base station achieve both full spatial multiplexing gain M and full beamforming gain M at the same time.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Closed-form sum-capacity expressions are derived for MU-MIMO communications where the users form a controllable UAV swarm. When the base station uses an M-element uniform linear array, proper UAV positioning simultaneously realizes the full spatial multiplexing gain M and the full beamforming gain M. For a uniform planar array the number of users that can each receive full beamforming gain M grows asymptotically as πM/4. A manifold-based algorithm then optimizes the swarm formation to maximize either the SIC sum-capacity or the TIN sum-rate subject to practical geometric constraints.
What carries the argument
The manifold structure of the array response vectors with respect to UAV directions, which turns formation design into a tractable optimization over user angles.
If this is right
- An M-antenna base station can serve exactly M UAV users each enjoying the full array gain M when the swarm is placed along the appropriate angular grid.
- The sum-capacity scales linearly with M rather than being limited by the usual trade-off between multiplexing and beamforming.
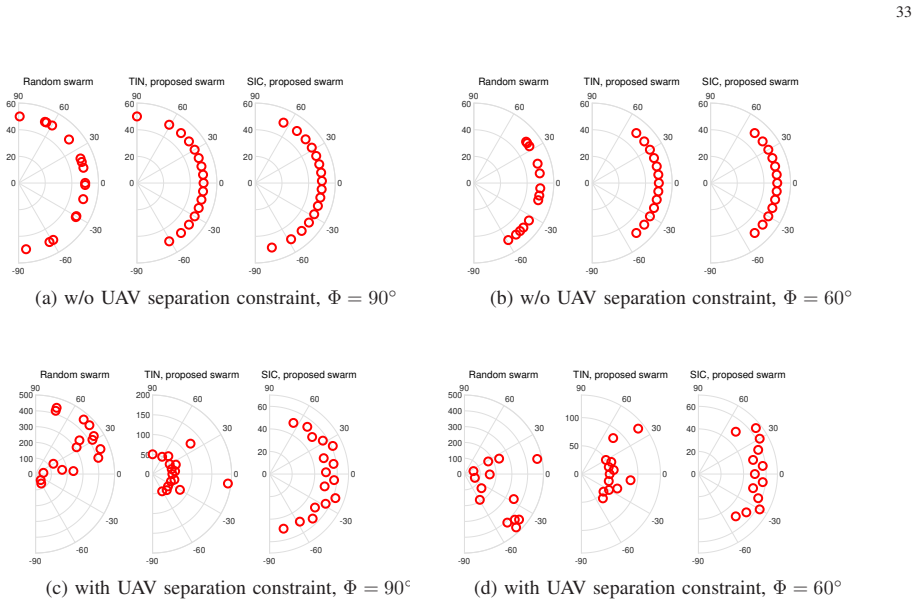
- The manifold optimization algorithm produces near-optimal formations that respect minimum-distance and cohesion constraints while maximizing either SIC or TIN rates.
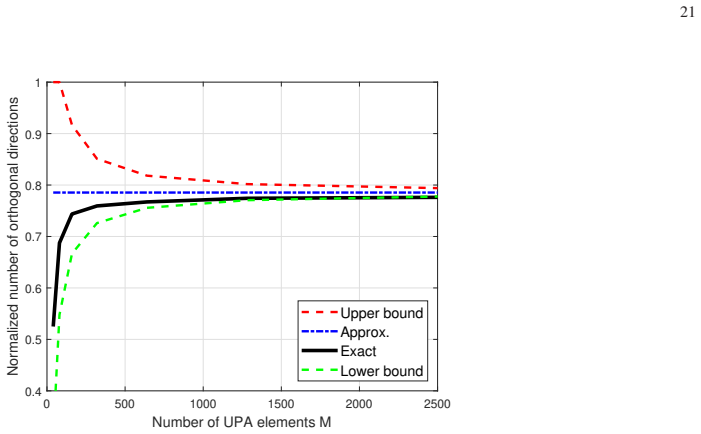
- For planar arrays the fraction of users that can each receive full beamforming gain approaches π/4 of the total antenna count.
Where Pith is reading between the lines
- The same positioning principle could be applied to ground robot swarms whose locations are also controllable, potentially yielding analogous capacity gains in terrestrial networks.
- Allowing slow UAV repositioning between coherence blocks might further increase long-term throughput if the optimization is rerun periodically.
- Extending the model to include Doppler shifts from UAV motion would test whether the static-formation gains remain achievable under realistic flight speeds.
Load-bearing premise
The closed-form results and optimizations assume ideal far-field plane-wave propagation together with perfect and instantaneous channel state information and fixed UAV positions during each transmission.
What would settle it
Measure the achieved sum-rate in a hardware testbed using real UAVs whose positions are controlled according to the derived formations, then compare the scaling with M against the predicted full multiplexing-plus-beamforming gain under imperfect channel estimation and mild motion.
Figures




read the original abstract
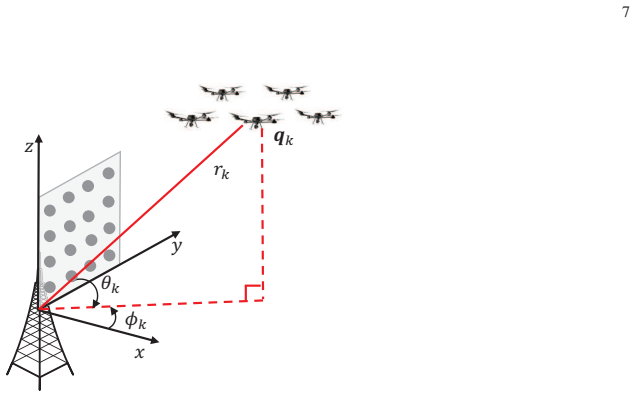
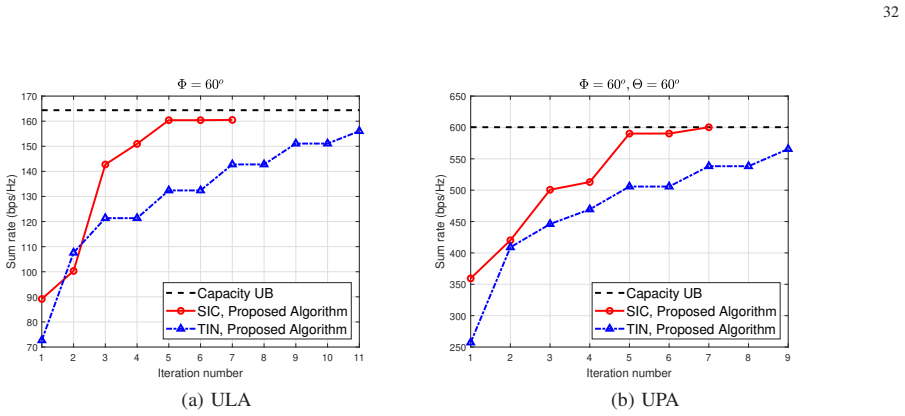
For a multi-user multiple-input multiple-output (MU-MIMO) wireless communication system, imagining that the locations of the users are now fully controllable, what is the maximum sum-capacity, and what are the corresponding optimal user locations? While these questions are irrelevant in conventional human-centric communications with random user mobility, they become critically important for emerging applications involving ground or aerial robots. This paper addresses these fundamental questions in the context of MU-MIMO communications with an unmanned aerial vehicle (UAV) swarm acting as the users. To this end, we first derive closed-form expressions for the sum-capacity of MU-MIMO UAV swarm communications. Our results reveal that, compared to conventional MU-MIMO systems, the additional degrees of freedom provided by the coordinated mobility of the UAV swarm yields substantial capacity enhancement. Specifically, when the base station (BS) is equipped with an $M$-element uniform linear array (ULA), the full spatial multiplexing gain and beamforming gain, both equal to $M$, can be achieved simultaneously. For a BS with a uniform planar array (UPA), we show that asymptotically $\frac{\pi M}{4}$ users can simultaneously enjoy the full beamforming gain $M$. Furthermore, we propose a novel framework to optimize UAV swarm formation for maximizing the sum-capacity achieved by successive interference cancellation (SIC) and maximizing the sum-rate via treating interference as noise (TIN), taking into account practical considerations such as collision avoidance and swarm cohesion constraints. By exploiting the manifold structure of the array response vectors with respect to UAV directions, we develop an efficient algorithm to solve the resulting non-convex formation optimization problems. Extensive simulation results demonstrate that the proposed algorithms achieve near-optimal performance.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper derives closed-form sum-capacity expressions for MU-MIMO communications in which the users form a controllable UAV swarm. It shows that, for a base station equipped with an M-element ULA, optimal UAV placement simultaneously achieves spatial multiplexing gain M and beamforming gain M. For a UPA, asymptotically πM/4 users can each obtain the full beamforming gain M. The work further develops a manifold-based optimization framework to maximize sum-capacity under successive interference cancellation and under treating interference as noise, subject to collision-avoidance and cohesion constraints, and reports near-optimal performance in simulations.
Significance. If the closed-form derivations hold under the stated model, the result quantifies the capacity advantage conferred by coordinated UAV mobility over conventional random-user MU-MIMO. The simultaneous attainment of full multiplexing and beamforming gains for a ULA is a clean, parameter-free characterization that could guide formation design. The manifold optimization approach and the comparison between SIC and TIN receivers add practical value for aerial-network system engineering.
major comments (2)
- [Capacity Characterization (Section III)] The central claim that an M-element ULA simultaneously realizes multiplexing gain M and beamforming gain M rests on the existence of M distinct UAV angles whose far-field steering vectors are mutually orthogonal (yielding H^H H = M I). The manuscript should explicitly derive the admissible angle set and confirm that this orthogonality is preserved under the collision-avoidance and cohesion constraints introduced later in the formation-optimization stage.
- [System Model and Assumptions] The closed-form capacity expressions and the subsequent optimization assume perfect CSI, far-field propagation, and quasi-static UAV positions during each transmission block. Because UAV motion necessarily introduces Doppler spread and time-varying channels, the paper must quantify the regime (maximum velocity, coherence time, etc.) in which these idealizations remain valid; otherwise the claimed gains cannot be guaranteed in practice.
minor comments (2)
- [Notation and Preliminaries] Notation for the array response vectors and the manifold gradient should be introduced once and used consistently; the current alternation between a(θ) and v(θ) is confusing.
- [Numerical Results] The simulation figures would benefit from an additional curve showing the performance gap to the derived closed-form upper bound, making the “near-optimal” claim visually quantitative.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major comment below and will revise the manuscript to incorporate the suggestions where appropriate.
read point-by-point responses
-
Referee: [Capacity Characterization (Section III)] The central claim that an M-element ULA simultaneously realizes multiplexing gain M and beamforming gain M rests on the existence of M distinct UAV angles whose far-field steering vectors are mutually orthogonal (yielding H^H H = M I). The manuscript should explicitly derive the admissible angle set and confirm that this orthogonality is preserved under the collision-avoidance and cohesion constraints introduced later in the formation-optimization stage.
Authors: We appreciate this observation. In the revised manuscript, we will explicitly derive the admissible angle set in Section III. For a half-wavelength spaced ULA, the angles satisfying sin(θ_k) = (2k - M - 1)/M for k = 1 to M produce mutually orthogonal steering vectors, yielding H^H H = M I. We will further show that the manifold optimization framework, when initialized within the feasible region defined by collision-avoidance and cohesion constraints, can select configurations from this admissible set for sufficiently large allowable formation areas. Additional analysis and simulations will confirm that the optimized formations achieve the claimed full gains while respecting the constraints. revision: yes
-
Referee: [System Model and Assumptions] The closed-form capacity expressions and the subsequent optimization assume perfect CSI, far-field propagation, and quasi-static UAV positions during each transmission block. Because UAV motion necessarily introduces Doppler spread and time-varying channels, the paper must quantify the regime (maximum velocity, coherence time, etc.) in which these idealizations remain valid; otherwise the claimed gains cannot be guaranteed in practice.
Authors: We agree that the ideal assumptions require qualification for practical relevance. In the revised system model section, we will add a discussion quantifying the validity regime. Using the Doppler frequency f_d = v f_c / c, we will specify that the quasi-static and far-field assumptions hold with negligible Doppler spread for UAV velocities v ≤ 5 m/s at typical carrier frequencies (e.g., 2 GHz) when the transmission block duration is much smaller than the coherence time (e.g., > 10 ms). We will note that the derived expressions provide theoretical upper bounds and that higher velocities would require channel tracking, which is outside the current scope. revision: partial
Circularity Check
No significant circularity identified
full rationale
The paper extends standard far-field MIMO array response models to controllable UAV positions and derives closed-form sum-capacity expressions directly from the resulting channel matrix H. The central claim (full multiplexing gain M and beamforming gain M achieved simultaneously for ULA) follows from choosing M distinct angles such that the steering vectors satisfy a^H(θ_i) a(θ_j) = M δ_{ij}, yielding H^H H = M I under the model; this is a direct algebraic consequence of the ULA response definition and orthogonality condition, not a self-definition or fitted input renamed as prediction. Formation optimization uses manifold geometry on the array manifold but introduces no load-bearing self-citation chain or ansatz smuggled from prior work by the same authors. The derivation remains self-contained against conventional MIMO capacity formulas with no reduction of outputs to inputs by construction.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Standard far-field MU-MIMO channel model using array response vectors
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking (D=3 forcing) unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
when the base station is equipped with an M-element uniform linear array, the full spatial multiplexing gain and beamforming gain, both equal to M, can be achieved simultaneously
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel (J(x) uniqueness) unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
C^*=M log2(1+ρM) ... achieved by rk=rmin and {φ_l} any K-element subset of (36)
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
From single user to multiuser communications: Shifting the MIMO paradigm,
D. Gesbert, M. Kountouris, R. W. Heath Jr., C. B. Chae, and T. Salzer, “From single user to multiuser communications: Shifting the MIMO paradigm,” IEEE Signal Process. Mag. , vol. 24, no. 5, pp. 36–46, Oct. 2007
work page 2007
-
[2]
Noncooperative cellular wireless with unlimited numbers of base station antennas,
T. L. Marzetta, “Noncooperative cellular wireless with unlimited numbers of base station antennas,” IEEE Trans. Wireless Commun., vol. 9, no. 11, pp. 3590–3600, Nov. 2010
work page 2010
-
[3]
Energy and sp ectral efficiency of very large multiuser MIMO systems,
H. Q. Ngo, E. G. Larsson, and T. L. Marzetta, “Energy and sp ectral efficiency of very large multiuser MIMO systems,” IEEE Trans. Commun. , vol. 61, no. 4, pp. 1436–1449, Apr. 2013
work page 2013
-
[4]
On limits of wireless commu nications in a fading environment when using multiple antennas,
G. J. Foschini and M. J. Gans, “On limits of wireless commu nications in a fading environment when using multiple antennas,” Wireless Personal Communications , vol. 6, no. 3, pp. 311–355, Mar 1998
work page 1998
-
[5]
Capacity of multi-antenna Gaussian channe ls,
E. Telatar, “Capacity of multi-antenna Gaussian channe ls,” European transactions on telecommunications , vol. 10, no. 6, pp. 585–596, Nov. 1999
work page 1999
-
[6]
The capacity region of the Gaussian multiple-input multiple-o utput broadcast channel,
H. Weingarten, Y . Steinberg, and S. Shamai (Shitz), “The capacity region of the Gaussian multiple-input multiple-o utput broadcast channel,” IEEE Trans. Inf. Theory , vol. 52, no. 9, pp. 3936–3964, Sep. 2006
work page 2006
-
[7]
On the achievable throughput of a multiantenna Gaussian broadcast channel,
G. Caire and S. Shamai, “On the achievable throughput of a multiantenna Gaussian broadcast channel,” IEEE Trans. Inf. Theory, vol. 49, no. 7, pp. 1691–1706, Jul. 2003
work page 2003
-
[8]
On the dualit y of Gaussian multiple-access and broadcast channels,
N. Jindal and A. Vishwanath, S. Goldsmith, “On the dualit y of Gaussian multiple-access and broadcast channels,” IEEE Trans. Inf. Theory , vol. 50, no. 5, pp. 768–783, May 2004
work page 2004
-
[9]
Duality, ac hievable rates, and sum-rate capacity of Gaussian MIMO broa dcast channels,
S. Vishwanath, N. Jindal, and A. Goldsmith, “Duality, ac hievable rates, and sum-rate capacity of Gaussian MIMO broa dcast channels,” IEEE Trans. Inf. Theory , vol. 49, no. 10, pp. 2658–2668, Oct. 2003
work page 2003
-
[10]
On Gaussian MIMO BC-MAC duality with multiple transmit covariance constraints,
L. Zhang, R. Zhang, Y . C. Liang, Y . Xin, and H. V . Poor, “On Gaussian MIMO BC-MAC duality with multiple transmit covariance constraints,” IEEE Trans. Inf. Theory , vol. 58, no. 4, pp. 2064–2078, Apr. 2012
work page 2064
-
[11]
Sum capacity of the vector Gaussian broadcast channel and uplink-downlink duality,
P . Viswanath and D. N. C. Tse, “Sum capacity of the vector Gaussian broadcast channel and uplink-downlink duality,” IEEE Trans. Inf. Theory , vol. 49, no. 8, pp. 1912–1921, Aug. 2003
work page 1912
-
[12]
M. Costa, “Writing on dirty paper,” IEEE Trans. Inf. Theory , vol. 29, no. 3, pp. 439–441, May 1983
work page 1983
-
[13]
Zero-forcing met hods for downlink spatial multiplexing in multiuser MIMO channels,
Q. H. Spencer and A. L. Swindlehurst, “Zero-forcing met hods for downlink spatial multiplexing in multiuser MIMO channels,” IEEE Trans. Signal Process. , vol. 52, no. 2, pp. 461 – 471, Feb. 2004
work page 2004
-
[14]
Transmitter optimization for the mult i-antenna downlink with per-antenna power constraints,
W. Y u and T. Lan, “Transmitter optimization for the mult i-antenna downlink with per-antenna power constraints,” IEEE Trans. Signal Process. , vol. 55, no. 6, pp. 2646–2660, Jun. 2007
work page 2007
-
[15]
Massive MI MO has unlimited capacity,
E. Bjornson, J. Hoydis, and L. Sanguinetti, “Massive MI MO has unlimited capacity,” IEEE Trans. Wireless Commun. , vol. 17, no. 1, pp. 574–590, Jan. 2018
work page 2018
-
[16]
Y . Zeng, X. Xu, S. Jin, and R. Zhang, “Simultaneous navig ation and radio mapping for cellular-connected uav with dee p reinforcement learning,” IEEE Trans. Wireless Commun. , vol. 20, no. 7, pp. 4205–4220, 2021
work page 2021
-
[17]
A message ferrying app roach for data delivery in sparse mobile ad hoc networks,
W. Zhao, M. Ammar, and E. Zegura, “A message ferrying app roach for data delivery in sparse mobile ad hoc networks,” In Proc. ACM Mobihoc , May 2004
work page 2004
-
[18]
Routing in a delay tolera nt network,
S. Jain, K. Fall, and R. Patra, “Routing in a delay tolera nt network,” Proc. ACM SIGCOMM , pp. 1–13, Jan. 2004
work page 2004
-
[19]
Throughput maximizati on for UA V-enabled mobile relaying systems,
Y . Zeng, R. Zhang, and T. J. Lim, “Throughput maximizati on for UA V-enabled mobile relaying systems,” IEEE Trans. Commun., vol. 64, no. 12, pp. 4983–4996, Dec. 2016
work page 2016
-
[20]
Accessing from the sky: a tu torial on UA V communications for 5G and beyond,
Y . Zeng, Q. Wu, and R. Zhang, “Accessing from the sky: a tu torial on UA V communications for 5G and beyond,” Proc. of the IEEE , vol. 107, no. 12, pp. 2327–2375, Dec. 2019. 43
work page 2019
-
[21]
Energy-efficient UA V communicati on with trajectory optimization,
Y . Zeng and R. Zhang, “Energy-efficient UA V communicati on with trajectory optimization,” IEEE Trans. Wireless Commun., vol. 16, no. 6, pp. 3747–3760, Jun. 2017
work page 2017
-
[22]
Design of optimal h igh-rank line-of-sight MIMO channels,
F. Bohagen, P . Orten, and G. E. Oien, “Design of optimal h igh-rank line-of-sight MIMO channels,” IEEE Trans. Wireless Commun., vol. 6, no. 4, pp. 1420–1425, Apr. 2007
work page 2007
-
[23]
A tutorial on near-field XL- MIMO communications toward 6G,
H. Lu, Y . Zeng, C. Y ou, et al, “A tutorial on near-field XL- MIMO communications toward 6G,” IEEE Commun. Surveys Tutorials, vol. 26, no. 4, pp. 2213–2257, 4th quarter 2024
work page 2024
-
[24]
W. K. New, K.-K. Wong, H. Xu, et al, “A tutorial on fluid ant enna system for 6G networks: Encompassing communication theory, optimization methods and hardware designs,” IEEE Commun. Surveys Tutorials , vol. 27, no. 4, pp. 2325–2377, Aug. 2025
work page 2025
-
[25]
A tutorial on movable antenn as for wireless networks,
L. Zhu, W. Ma, W. Mei, et al, “A tutorial on movable antenn as for wireless networks,” IEEE Commun. Surveys Tutorials , vol. 28, pp. 3002–3054, Feb. 2025
work page 2025
-
[26]
Wireless communicatio ns with unmanned aerial vehicles: opportunities and challe nges,
Y . Zeng, R. Zhang, and T. J. Lim, “Wireless communicatio ns with unmanned aerial vehicles: opportunities and challe nges,” IEEE Commun. Mag. , vol. 54, no. 5, pp. 36–42, May 2016
work page 2016
-
[27]
Commun ications and control for wireless drone-based antenna arra y,
M. Mozaffari, W. Saad, M. Bennis, and M. Debbah, “Commun ications and control for wireless drone-based antenna arra y,” IEEE Trans. Commun. , vol. 67, no. 1, pp. 820–834, Jan 2019
work page 2019
-
[28]
H. Lu, Y . Zeng, S. Ma, B. Li, S. Jin, and R. Zhang, “Wireles s Communication for Low-altitude Economy with UA V Swarm Enabled Two-Level Movable Antenna System,” to appear in IEEE Trans. Wireless Commun., arxiv.org/abs/2 505.22286, 2026
work page 2026
-
[29]
3-D Deployment o f UA V Swarm for Massive MIMO Communications,
N. Gao, X. Li, S. Jin, and M. Matthaiou, “3-D Deployment o f UA V Swarm for Massive MIMO Communications,” IEEE J. Sel. Areas Commun. , vol. 39, no. 10, pp. 3022–3034, Oct. 2021
work page 2021
-
[30]
UA V Swarm Posi tion Optimization for High Capacity MIMO Backhaul,
S. Hanna, E. Krijestorac, and D. Cabric, “UA V Swarm Posi tion Optimization for High Capacity MIMO Backhaul,” IEEE J. Sel. Areas Commun. , vol. 39, no. 10, pp. 3006–3021, Oct. 2021
work page 2021
-
[31]
M. Grant and S. Boyd, CVX: Matlab software for disciplined convex programming, v ersion 2.1 , available online at http://cvxr.com/cvx
-
[32]
Toward environment-aware 6G communi cations via channel knowledge map,
Y . Zeng and X. Xu, “Toward environment-aware 6G communi cations via channel knowledge map,” IEEE Wireless Commun., vol. 28, no. 3, pp. 84–91, 2021
work page 2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.