Recognition: 1 theorem link
· Lean TheoremTeachAnything: A Multimodal Crowdsourcing Platform for Training Embodied AI Agents in Symmetrical Reality
Pith reviewed 2026-05-15 01:36 UTC · model grok-4.3
The pith
TeachAnything platform collects multimodal demonstrations via crowdsourcing and physics simulation to train embodied agents for Symmetrical Reality.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
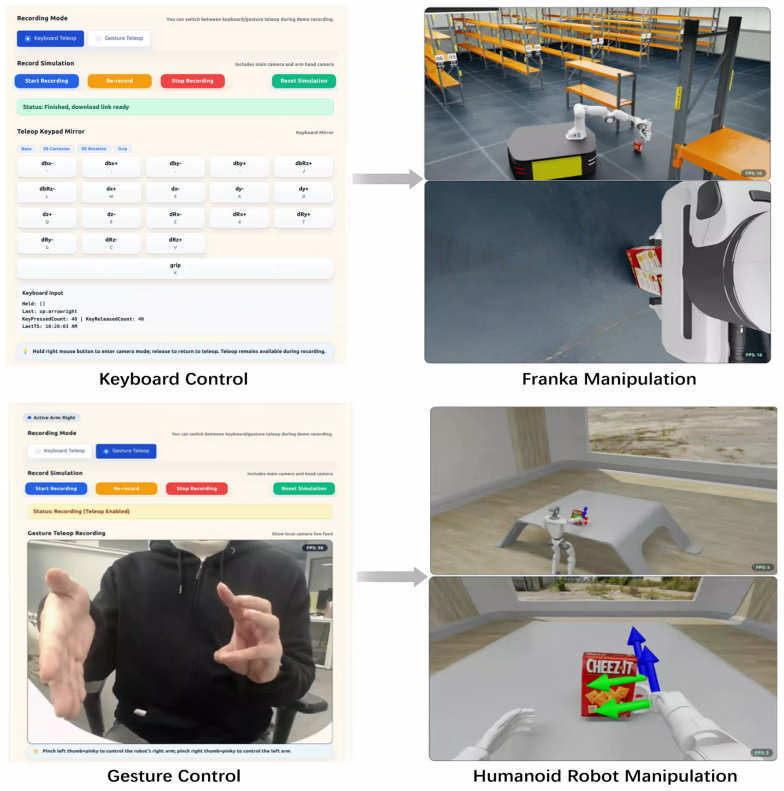
Symmetrical Reality demands agents with human-like intelligence, which requires richer and more diverse human guidance than existing methods supply. To address this, the authors introduce a three-stage demonstration paradigm that combines multimodal signals. They implement this in TeachAnything, a cloud-based crowdsourcing platform equipped with physics simulation, allowing collection of demonstration data across different scenes, tasks, and agent embodiments while unifying virtual and physical interactions.
What carries the argument
The TeachAnything platform, a cloud-based crowdsourcing system with physics simulation that implements a three-stage multimodal demonstration paradigm to collect diverse data.
Load-bearing premise
That the three-stage multimodal paradigm and crowdsourcing platform will successfully provide the richer human guidance needed for agents to acquire human-like intelligence.
What would settle it
A study where embodied agents trained using TeachAnything data show no improvement in human-like behavior or task performance in Symmetrical Reality scenarios compared to agents trained with conventional single-modality data.
Figures


read the original abstract
Symmetrical Reality (SR) is emerging as a future trend for human-agent coexistence, placing higher demands on agents to acquire human-like intelligence. It calls for richer and more diverse human guidance. We introduce a three-stage demonstration paradigm integrating multimodal demonstration signals. Building on this paradigm, we developed TeachAnything, a cloud-based, crowdsourcing-oriented demonstration platform with physics simulation capable of collecting diverse demonstration data across varied scenes, tasks, and embodiments. By unifying virtual and physical interactions through both methodological design and physics simulation, the system serves as a practical foundation for developing embodied agents aligned with Symmetrical Reality.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that Symmetrical Reality (SR) demands richer multimodal human guidance for embodied agents to acquire human-like intelligence. It introduces a three-stage demonstration paradigm integrating multimodal signals and presents TeachAnything, a cloud-based crowdsourcing platform with physics simulation for collecting diverse demonstration data across scenes, tasks, and embodiments. The system unifies virtual and physical interactions to serve as a practical foundation for developing aligned embodied agents.
Significance. A validated crowdsourcing platform for multimodal embodied data collection could meaningfully advance training resources for symmetrical reality settings, particularly if it yields higher-quality demonstrations than existing simulators. The manuscript's detailed architecture and workflow description is a clear strength, but the complete absence of any empirical validation means the claimed practical foundation remains untested and the significance is prospective only.
major comments (2)
- [Abstract] Abstract: the assertion that TeachAnything 'serves as a practical foundation for developing embodied agents aligned with Symmetrical Reality' is unsupported because the manuscript reports no agent training experiments, no quantitative metrics on data quality/diversity, no baseline comparisons (e.g., Habitat or AI2-THOR), and no ablation of the three-stage paradigm.
- [Abstract / Introduction] The central claim that the three-stage multimodal paradigm supplies 'richer and more diverse human guidance' (Abstract) lacks any reported evidence of improved agent performance or data utility; without such results the paradigm's contribution cannot be assessed.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive report. The manuscript is a system paper focused on the design of the TeachAnything platform and the three-stage multimodal demonstration paradigm; it does not include agent training experiments or quantitative evaluations. We will revise the abstract and introduction to remove unsupported performance claims and to accurately reflect the paper's scope as a data-collection platform.
read point-by-point responses
-
Referee: [Abstract] Abstract: the assertion that TeachAnything 'serves as a practical foundation for developing embodied agents aligned with Symmetrical Reality' is unsupported because the manuscript reports no agent training experiments, no quantitative metrics on data quality/diversity, no baseline comparisons (e.g., Habitat or AI2-THOR), and no ablation of the three-stage paradigm.
Authors: We agree that the current wording overstates the manuscript's contribution. The paper describes a platform and paradigm for collecting multimodal demonstrations but contains no training results, metrics, or comparisons. We will revise the abstract to state that TeachAnything provides a platform intended to support future development of aligned embodied agents, removing any implication of validated practical utility. revision: yes
-
Referee: [Abstract / Introduction] The central claim that the three-stage multimodal paradigm supplies 'richer and more diverse human guidance' (Abstract) lacks any reported evidence of improved agent performance or data utility; without such results the paradigm's contribution cannot be assessed.
Authors: We acknowledge that the manuscript offers no empirical evidence that the three-stage paradigm yields richer guidance in terms of downstream agent performance. The claim is based on the design rationale that multimodal signals (vision, language, action, etc.) are richer than unimodal ones. We will revise the abstract and introduction to present this as a design hypothesis rather than an established result, and we will note that empirical validation of data utility is planned for future work. revision: yes
Circularity Check
No circularity: platform description is self-contained methodological contribution
full rationale
The manuscript presents TeachAnything as a new cloud-based crowdsourcing platform implementing a three-stage multimodal demonstration paradigm for embodied AI data collection. No equations, fitted parameters, or quantitative predictions appear in the provided text. The central claim that the system 'serves as a practical foundation' is framed as a design outcome of the architecture and physics simulation, not derived from or reduced to any self-referential inputs, self-citations, or renamed empirical patterns. No load-bearing self-citation chains or ansatzes are invoked. This is a standard descriptive systems paper with no derivation chain that collapses by construction.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Multimodal demonstration signals integrated in a three-stage paradigm provide richer guidance than single-modality methods for embodied AI training.
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/ArithmeticFromLogic.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We introduce a three-stage demonstration paradigm integrating multimodal demonstration signals... language, video, and teleoperation demonstrations within a physics-based simulation environment
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
On the emergence of symmetrical reality,
Z. Zhang, Z. Zhang, Z. Jiao, Y . Su, H. Liu, W. Wang, and S.-C. Zhu, “On the emergence of symmetrical reality,” inProceedings of the IEEE Conference Virtual Reality and 3D User Interfaces (VR), pp. 639–649, IEEE, 2024
work page 2024
-
[2]
Embodied AI: A Survey on the Evolution from Perceptive to Behavioral Intelligence,
Y . Chen, M. Wei, X. Wang, Y . Liu, J. Wang, H. Song, L. Ma, D. Di, C. Sun, K. Liu, et al., “Embodied AI: A Survey on the Evolution from Perceptive to Behavioral Intelligence,”SmartBot, vol. 1, no. 3, p. e70003, Wiley Online Library, 2025
work page 2025
-
[3]
Roboturk: A crowdsourcing platform for robotic skill learning through imitation,
A. Mandlekar, Y . Zhu, A. Garg, J. Booher, M. Spero, A. Tung, J. Gao, J. Emmons, A. Gupta, E. Orbay, et al., “Roboturk: A crowdsourcing platform for robotic skill learning through imitation,” inConference on Robot Learning, pp. 879–893, PMLR, 2018. 4
work page 2018
-
[4]
Rt-2: Vision-language-action models transfer web knowledge to robotic control,
B. Zitkovich, T. Yu, S. Xu, P. Xu, T. Xiao, F. Xia, J. Wu, P. Wohlhart, S. Welker, A. Wahid, et al., “Rt-2: Vision-language-action models transfer web knowledge to robotic control,” inConference on Robot Learning, pp. 2165–2183, PMLR, 2023
work page 2023
-
[5]
Reconstructing hands in 3d with transformers,
G. Pavlakos, D. Shan, I. Radosavovic, A. Kanazawa, D. Fouhey, and J. Malik, “Reconstructing hands in 3d with transformers,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pp. 9826–9836, 2024. 5
work page 2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.