ISI Modeling and BER Performance for Rotating Light-Trail Image Sensor Communication
Pith reviewed 2026-05-19 23:18 UTC · model grok-4.3
pith:E3OHN5B2 Add to your LaTeX paper
What is a Pith Number?\usepackage{pith}
\pithnumber{E3OHN5B2}
Prints a linked pith:E3OHN5B2 badge after your title and writes the identifier into PDF metadata. Compiles on arXiv with no extra files. Learn more
The pith
A closed-form bit-error rate for rotating light-trail image sensor communication allows selection of the control angle that maximizes throughput at a target reliability.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
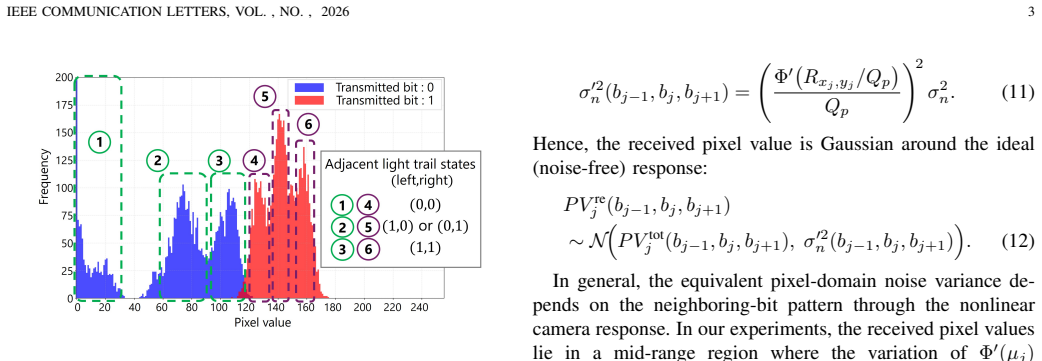
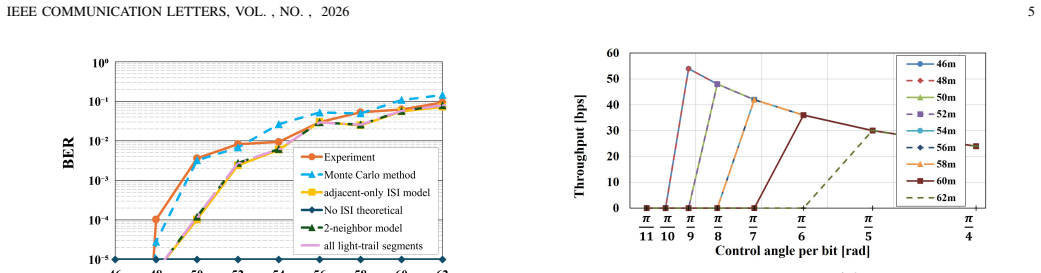
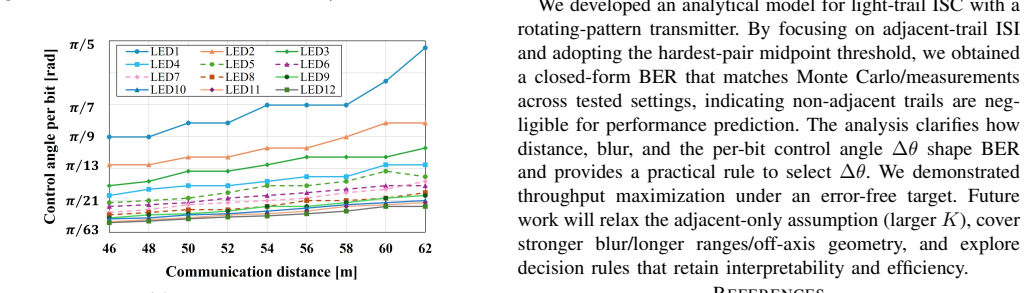
The central discovery is that trimodal pixel-value histograms justify an adjacent-only ISI model for the rotating light-trail ISC system. Combined with a single-LED single-blink power-to-pixel mapping and probabilistic noise, this yields a closed-form BER via the Q-function after applying the hardest-pair midpoint threshold and marginalization. The model comes with sufficiency conditions and is shown to match Monte Carlo and experimental results. The resulting BER expression then serves to maximize throughput by appropriate choice of control angle under a BER constraint.
What carries the argument
The adjacent-only inter-symbol interference model, motivated by trimodal pixel-value histograms, in which the decision at each segment depends only on its adjacent segments, enables the closed-form BER calculation.
If this is right
- The analytical BER expression permits direct optimization of the control angle for maximum throughput under a reliability constraint.
- Practical sufficiency conditions identify scenarios where the adjacent-only approximation is sufficient for accurate performance analysis.
- Validation against Monte Carlo simulations and experiments confirms the tightness of the derived BER.
- Per-segment BER calculations allow fine-grained analysis of error performance along the light trail.
Where Pith is reading between the lines
- If the model holds, similar analytical approaches could apply to other scanning or rotating optical communication systems using image sensors.
- The optimization procedure might be extended to adaptive angle control based on real-time channel feedback.
- Testing the model in multi-LED propeller setups would check its scalability.
Load-bearing premise
Trimodal pixel-value histograms allow the inter-symbol interference to be modeled as depending only on adjacent segments.
What would settle it
An experiment or simulation that demonstrates significant bit-error dependence on non-adjacent segments would show that the adjacent-only ISI model is inadequate.
Figures

read the original abstract
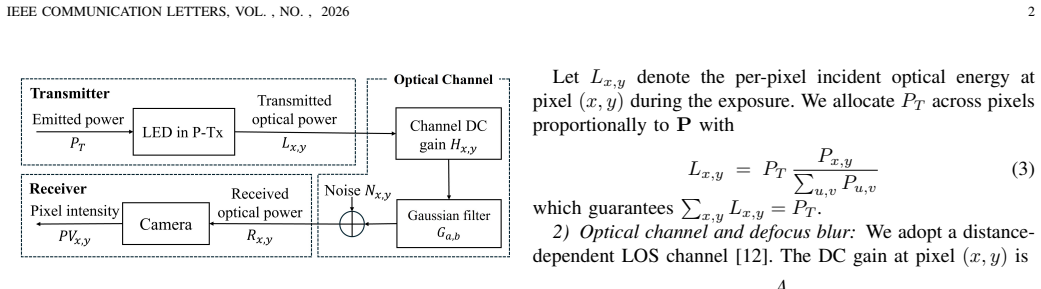
Image sensor communication (ISC) employing a propeller-LED transmitter encodes data along rotating light trails. We present an analytical framework that (i) constructs a single-LED, single-blink light trail model that maps optical power to pixel values, and (ii) integrates a probabilistic noise model to derive a closed-form bit-error rate (BER) using the $Q$-function. Trimodal pixel-value histograms motivate an adjacent-only inter-symbol interference (ISI) model in which the decision at segment $j$ depends on adjacent segments. Applying a hardest-pair midpoint threshold yields per-segment BER and a general BER after marginalization. We further provide practical sufficiency conditions under which adjacent-only ISI is adequate, and validate its tightness against Monte Carlo simulations and experimental results. Using the analytical BER, we select the control angle that maximizes throughput while satisfying a target BER reliability constraint.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript develops an analytical framework for image sensor communication (ISC) with a rotating propeller-LED transmitter. It constructs a single-LED light-trail model mapping optical power to pixel values, incorporates a probabilistic noise model, and derives a closed-form BER expression via the Q-function after marginalizing over segments under an adjacent-only ISI model. The model is motivated by trimodal pixel-value histograms, with practical sufficiency conditions provided for its adequacy. The analytical BER is validated against Monte Carlo simulations and experiments, and then used to select the control angle maximizing throughput subject to a target BER reliability constraint.
Significance. If the adjacent-only ISI model remains accurate in the operating regime, the closed-form BER enables analytical optimization of system parameters such as control angle, offering a practical alternative to exhaustive simulation for designing reliable ISC links. The derivation via Q-function marginalization, provision of sufficiency conditions, and cross-validation with Monte Carlo and experiments are notable strengths that support the central claim of throughput maximization under reliability constraints.
major comments (2)
- [ISI modeling and BER derivation (around the marginalization step and sufficiency conditions)] The central claim relies on using the analytical BER (derived under the adjacent-only ISI model) to select the control angle. However, the sufficiency conditions for neglecting non-adjacent interference are stated generally; it is not shown that these conditions hold at the specific optimized angle, where changes in trail spacing or rotation speed could increase cumulative overlap from segments j-2 or earlier. This verification is load-bearing for ensuring the selected angle satisfies the target BER without optimism.
- [Optimization results and validation] Table or figure reporting the optimized control angle and resulting throughput/BER should include a direct comparison of the analytical BER against Monte Carlo at that exact angle (with error bars), to confirm the model tightness holds where the optimization is applied.
minor comments (2)
- [BER derivation] Notation for the per-segment decision threshold (hardest-pair midpoint) and the marginalization integral could be clarified with an explicit equation reference to avoid ambiguity in how the Q-function is applied across segments.
- [Abstract and experimental validation section] The abstract states validation against experiments but does not indicate the number of trials or sensor integration time settings used; adding this detail would strengthen reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive comments and detailed review. We address each major comment below and will revise the manuscript accordingly to strengthen the validation of the ISI model and optimization results.
read point-by-point responses
-
Referee: [ISI modeling and BER derivation (around the marginalization step and sufficiency conditions)] The central claim relies on using the analytical BER (derived under the adjacent-only ISI model) to select the control angle. However, the sufficiency conditions for neglecting non-adjacent interference are stated generally; it is not shown that these conditions hold at the specific optimized angle, where changes in trail spacing or rotation speed could increase cumulative overlap from segments j-2 or earlier. This verification is load-bearing for ensuring the selected angle satisfies the target BER without optimism.
Authors: We agree that explicit verification of the sufficiency conditions at the optimized control angle is necessary to support the central claim without potential optimism. The conditions depend on parameters such as rotation speed and segment spacing, which are fixed once the angle is selected. In the revised manuscript, we will add a targeted check (e.g., in a new subsection or appendix) computing the relative interference contribution from segments j-2 and beyond at the optimized angle and confirming that the trimodal histogram property remains valid, thereby demonstrating that the adjacent-only model holds at the operating point. revision: yes
-
Referee: [Optimization results and validation] Table or figure reporting the optimized control angle and resulting throughput/BER should include a direct comparison of the analytical BER against Monte Carlo at that exact angle (with error bars), to confirm the model tightness holds where the optimization is applied.
Authors: We appreciate this suggestion for more focused validation. The current manuscript already compares analytical BER to Monte Carlo over a range of angles, but we acknowledge the benefit of isolating the exact optimized angle. In the revision, we will update the relevant figure or table to include Monte Carlo simulation results (with error bars) specifically evaluated at the optimized control angle, placed alongside the analytical BER curve to directly confirm model tightness at the point of optimization. revision: yes
Circularity Check
Derivation is self-contained with no load-bearing reductions to inputs or self-citations
full rationale
The paper constructs an analytical BER by first mapping optical power to pixel values in a single-LED light-trail model, then integrating a probabilistic noise model and marginalizing over segments under an adjacent-only ISI assumption motivated by observed trimodal histograms. A hardest-pair midpoint threshold and Q-function are applied to obtain per-segment and general BER expressions. Practical sufficiency conditions are stated and the result is validated against Monte Carlo simulations and experiments. The control-angle selection for throughput maximization under a BER constraint follows directly from this closed-form expression. No equations reduce by construction to fitted parameters from the same data, no self-citations bear the central premise, and no ansatz or uniqueness claim is imported from prior author work. The derivation chain therefore remains independent of its validation data and external to any circular self-reference.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Probabilistic noise model allows closed-form BER via the Q-function
- domain assumption Pixel-value histograms are trimodal
Reference graph
Works this paper leans on
-
[1]
Fundamental analysis for visible-light communication system using LED lights,
T. Komine and M. Nakagawa, “Fundamental analysis for visible-light communication system using LED lights,”IEEE Trans. Consum. Elec- tron., vol. 50, no. 1, pp. 100–107, 2004
work page 2004
-
[2]
Visible light com- munication with LED traffic lights using 2-dimensional image sensor,
H. B. C. Wook, S. Haruyama, and M. Nakagawa, “Visible light com- munication with LED traffic lights using 2-dimensional image sensor,” IEICE Trans. Fundam. Electron. Commun. Comput. Sci., vol. E89-A, no. 3, pp. 654–659, Mar. 2006
work page 2006
-
[3]
K. Kamakura, “Image sensors meet LEDs,”IEICE Trans. Commun., vol. E100-B, no. 6, pp. 917–925, Jun. 2017
work page 2017
-
[4]
Tracking an led array transmitter for visible light communications in the driving situation,
T. Nagura, T. Yamazato, M. Katayama, T. Yendo, T. Fujii, and H. Okada, “Tracking an led array transmitter for visible light communications in the driving situation,” inProc. 7th Int. Symp. Wireless Commun. Syst. (ISWCS), 2010, pp. 765–769
work page 2010
-
[5]
S. Arai, H. Matsushita, Y . Ohira, T. Yendo, D. He, and T. Yamazato, “Maximum likelihood decoding based on pseudo-captured image tem- plates for image sensor communication,”NOLTA, IEICE, vol. 10, no. 2, pp. 173–189, Apr. 2019
work page 2019
-
[6]
Tactical drone for point-to-point data delivery using laser-visible light communication (l-vlc),
S. Motwani, “Tactical drone for point-to-point data delivery using laser-visible light communication (l-vlc),” inProc. 3rd Int. Conf. Adv. Commun. Technol. Netw. (CommNet), 2020, pp. 1–8
work page 2020
-
[7]
H. Takano, D. Hisano, M. Nakahara, K. Suzuoki, K. Maruta, Y . Onodera, R. Yaegashi, and Y . Nakayama, “Visible light communication on led- equipped drone and object-detecting camera for post-disaster monitor- ing,” inProc. IEEE 93rd Veh. Technol. Conf. (VTC2021-Spring), 2021, pp. 1–5
work page 2021
-
[8]
Z. Tang, S. Arai, and T. Yamazato, “Simplified alamouti-type space-time coding for image sensor communication using rotary led transmitter,” IEEE Photon. J., vol. 14, no. 1, pp. 1–7, 2022
work page 2022
-
[9]
Rotary led transmitter for improving data transmission rate of image sensor communication,
S. Arai, Z. Tang, A. Nakayama, H. Takata, and T. Yendo, “Rotary led transmitter for improving data transmission rate of image sensor communication,”IEEE Photon. J., vol. 13, no. 4, pp. 1–11, 2021
work page 2021
-
[10]
Image sensor communi- cation via light trail using propeller led transmitter,
Z. Tang, J. Zheng, T. Yamazato, and S. Arai, “Image sensor communi- cation via light trail using propeller led transmitter,”IEEE Photon. J., vol. 15, no. 5, pp. 1–12, 2023
work page 2023
-
[11]
S. Asaoka, S. Lu, T. Yamazato, and Z. Tang, “Theoretical modeling and interference prevention of light trails for led-propeller based image sensor communication,”IEICE Commun. Express, pp. 1–4, 2025
work page 2025
-
[12]
Characterization of optical camera communication based on a comprehensive system model,
A. Liu, W. Shi, M. Ouyang, and W. Liu, “Characterization of optical camera communication based on a comprehensive system model,”J. Lightw. Technol., vol. 40, no. 18, pp. 6087–6100, 2022
work page 2022
-
[13]
S. Arai, S. Mase, T. Yamazato, T. Endo, T. Fujii, M. Tanimoto, K. Kidono, Y . Kimura, and Y . Ninomiya, “Experimental on hierarchical transmission scheme for visible light communication using LED traffic light and high-speed camera,” inProc. IEEE 66th Veh. Technol. Conf. (VTC2007-Fall), 2007, pp. 2174–2178
work page 2007
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.