UPSim: UxNB Propagation Simulator for 3D Map-Driven FR3 Deployments
Pith reviewed 2026-05-19 23:02 UTC · model grok-4.3
The pith
UPSim derives visibility regions from 3D building geometry to model FR3 air-to-ground channels for UAVs without full per-position ray tracing.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
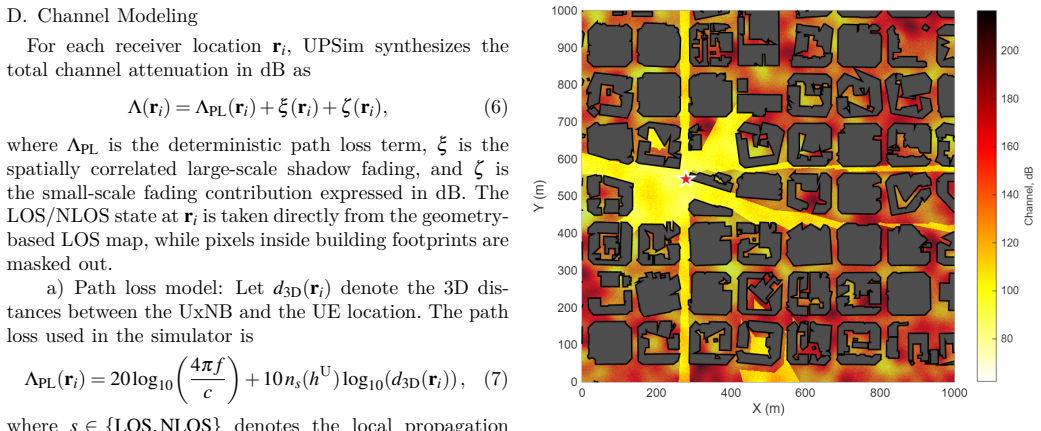
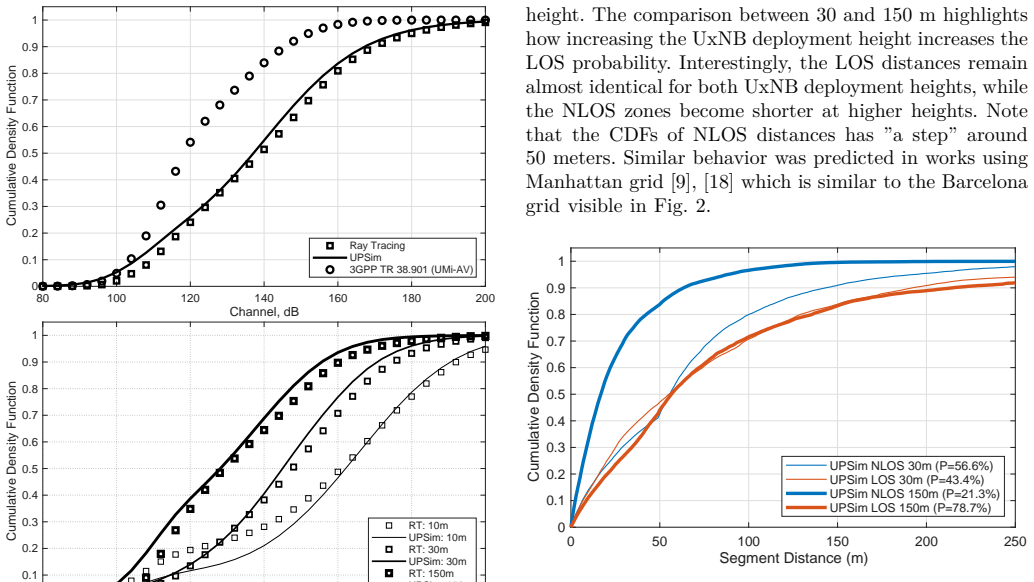
UPSim derives deterministic visibility regions from 3D building geometry via shadow projection and augments them with line-of-sight state-specific and altitude-aware path loss, correlated large-scale fading, and small-scale fading to model FR3 air-to-ground channels in UAV networks, achieving accuracy comparable to ray tracing on the 3D-GloBFP dataset while supporting route-based statistics such as outage distances.
What carries the argument
Shadow projection of 3D building geometry to derive deterministic visibility regions that set LOS/NLOS states for subsequent path-loss and fading models.
If this is right
- The maps enable route-based analysis of channel evolution over complex urban layouts.
- Trajectory-level statistics such as outage distances become available for planning.
- The method supplies a scalable middle ground between full ray tracing and purely stochastic generation.
- It supports mobility-aware planning and radio-map construction for aerial access networks.
Where Pith is reading between the lines
- The same shadow-projection approach could be reused for other frequency bands or for ground-to-air links with only parameter retuning.
- Integration with real-time flight planners would allow online prediction of outage segments along candidate routes.
- The resulting radio maps could feed into network-level simulators that optimize UAV base-station placement.
Load-bearing premise
That visibility regions obtained by shadow projection from static 3D buildings, together with LOS-specific path loss and correlated fading, are sufficient to reproduce real FR3 propagation statistics without needing full ray tracing at each position.
What would settle it
Generate channel statistics from UPSim and from full ray tracing over the same set of UAV trajectories on an independent urban map and test whether the distributions of received power or outage lengths differ beyond a chosen tolerance.
Figures



read the original abstract
We introduce UPSim (UxNB Propagation Simulator), a ray tracing-calibrated, semi-deterministic solution for spatially consistent FR3 air-to-ground propagation modeling in uncrewed aerial vehicle (UAV) networks. Instead of launching rays for every receiver position, UPSim derives deterministic visibility regions from 3D building geometry via shadow projection. It then augments these regions with line-of-sight (LOS) state-specific and altitude-aware path loss, correlated large-scale fading, and small-scale fading. Calibration and validation against FR3 ray tracing data using the global 3D-GloBFP building dataset demonstrate that UPSim accurately reproduces empirical channel distributions. Furthermore, the resulting maps support route-based analysis of channel evolution over complex urban layouts, exposing critical trajectory-level statistics such as outage distances. Consequently, UPSim offers a highly scalable, practical middle ground between computationally expensive full ray tracing and purely stochastic channel generation for mobility-aware planning and radio-map construction in aerial access scenarios.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces UPSim, a semi-deterministic propagation simulator for FR3 air-to-ground channels in UAV networks. It derives deterministic visibility regions via shadow projection on 3D building geometry, then augments them with LOS-state-specific altitude-aware path loss, correlated large-scale fading, and small-scale fading. Calibration and validation against full ray-tracing data on the global 3D-GloBFP building dataset are claimed to show that UPSim accurately reproduces empirical channel distributions, while enabling scalable route-based analysis of trajectory-level metrics such as outage distances.
Significance. If the accuracy and spatial-consistency claims hold after addressing the noted limitations, UPSim would constitute a practical, scalable middle ground between full ray tracing and purely stochastic models for FR3 UAV radio-map construction and mobility-aware network planning. The use of a public 3D dataset and emphasis on trajectory statistics are positive features that could support reproducible follow-on work.
major comments (1)
- [Abstract and model description] Abstract and model description: The central claim that shadow-projection visibility regions plus LOS-specific path loss and correlated fading reproduce ray-tracing channel distributions is load-bearing. Geometric shadow projection implements hard LOS/NLOS transitions and omits knife-edge diffraction, rooftop scattering, and diffuse multipath, all of which are material in the 7–24 GHz FR3 band. Calibration can adjust mean exponents and variances on the training geometries but cannot restore the missing spatial structure of transition zones that govern outage distances; a concrete test (e.g., comparison of outage-distance CDFs or spatial correlation lengths near building edges) is required to substantiate the reproduction claim.
minor comments (2)
- [Abstract] The abstract refers to 'correlated large-scale fading' without specifying the correlation kernel or its dependence on altitude and LOS state; this notation should be clarified with an equation or pseudocode in the methods section.
- [Validation] Quantitative validation metrics (RMSE, KS statistics, or outage-distance error) are mentioned only qualitatively; explicit tables or figures reporting these values against the ray-tracing ground truth would strengthen the accuracy claim.
Simulated Author's Rebuttal
We are grateful to the referee for the thorough review and constructive feedback on our manuscript. We address the major comment below with clarifications and indicate the revisions we will make.
read point-by-point responses
-
Referee: The central claim that shadow-projection visibility regions plus LOS-specific path loss and correlated fading reproduce ray-tracing channel distributions is load-bearing. Geometric shadow projection implements hard LOS/NLOS transitions and omits knife-edge diffraction, rooftop scattering, and diffuse multipath, all of which are material in the 7–24 GHz FR3 band. Calibration can adjust mean exponents and variances on the training geometries but cannot restore the missing spatial structure of transition zones that govern outage distances; a concrete test (e.g., comparison of outage-distance CDFs or spatial correlation lengths near building edges) is required to substantiate the reproduction claim.
Authors: We agree that geometric shadow projection produces hard LOS/NLOS boundaries and omits explicit modeling of knife-edge diffraction, rooftop scattering, and diffuse multipath, effects that are relevant in the FR3 band. UPSim is intentionally a calibrated semi-deterministic approximation rather than a full-wave simulator; the calibration tunes LOS/NLOS-specific path-loss exponents, large-scale fading variances, and spatial correlation distances against ray-tracing statistics on the 3D-GloBFP dataset to match empirical channel distributions. While parameter tuning cannot recreate every fine-scale spatial feature of transition zones, the existing validation already shows close agreement on aggregate distributions and enables the reported trajectory-level statistics. To directly address the referee’s concern, we will add a new subsection presenting outage-distance CDFs and spatial correlation lengths evaluated near building edges for both UPSim and full ray tracing. This addition will provide the concrete test requested and further substantiate the reproduction claim for mobility-aware metrics. revision: yes
Circularity Check
No significant circularity detected
full rationale
The UPSim model derives deterministic visibility regions directly from 3D building geometry via shadow projection, then applies LOS-state-specific altitude-aware path loss, correlated large-scale fading, and small-scale fading. Calibration and validation are performed against independent FR3 ray-tracing data on the public 3D-GloBFP dataset. No quoted equations or steps reduce the output channel distributions to the inputs by construction, nor do any load-bearing claims rest on self-citation chains or ansatzes smuggled from prior author work. The derivation remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption 3D building geometry from the 3D-GloBFP dataset provides a sufficiently accurate representation of real urban environments for visibility and propagation calculations
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking echoes?
echoesECHOES: this paper passage has the same mathematical shape or conceptual pattern as the Recognition theorem, but is not a direct formal dependency.
UPSim derives deterministic visibility regions from 3D building geometry via shadow projection... Building n is modeled as a prism with a flat roof, a polygonal footprint... projected horizontal location sn,vn of roof vertex
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
6G wireless communications in 7–24 GHz band: Opportunities, techniques, and challenges,
Z. Cui, P. Zhang, and S. Pollin, “6G wireless communications in 7–24 GHz band: Opportunities, techniques, and challenges,” in 2025 IEEE International Symposium on Dynamic Spectrum Access Networks (DySPAN), 2025, pp. 1–8
work page 2025
-
[2]
P. Series, “Propagation data and prediction methods required for the design of terrestrial broadband radio access systems oper- ating in a frequency range from 3 to 60 GHz„” Recommendation ITU-R P.1410-6, 2023
work page 2023
-
[3]
3D- GloBFP: the first global three-dimensional building footprint dataset,
Y. Che, X. Li, X. Liu, Y. Wang, W. Liao, X. Zheng, X. Zhang, X. Xu, Q. Shi, J. Zhu, H. Zhang, H. Yuan, and Y. Dai, “3D- GloBFP: the first global three-dimensional building footprint dataset,” Earth System Science Data, vol. 16, no. 11, pp. 5357– 5374, 2024
work page 2024
-
[4]
3D beamforming and handover analysis for UA V networks,
A. Colpaert, E. Vinogradov, and S. Pollin, “3D beamforming and handover analysis for UA V networks,” in 2020 IEEE Globecom Workshops, 2020, pp. 1–6
work page 2020
-
[5]
Ray-tracing Simulation and Hybrid Channel Modeling for Low-Terahertz UA V Communications,
Y. Li, N. Li, and C. Han, “Ray-tracing Simulation and Hybrid Channel Modeling for Low-Terahertz UA V Communications,” in ICC 2021 - IEEE International Conference on Communica- tions, 2021, pp. 1–6
work page 2021
-
[6]
Probability of Line of Sight Evaluation in Urban Environments using 3D Simulator,
A. Saboor, E. Vinogradov, Z. Cui, and S. Pollin, “Probability of Line of Sight Evaluation in Urban Environments using 3D Simulator,” in 2023 IEEE International Black Sea Conference on Communications and Networking (BlackSeaCom), 2023, pp. 135–140
work page 2023
-
[7]
On the use of high-rise topographic features for optimal aerial base station placement,
D.-Y. Kim, W. Saad, and J.-W. Lee, “On the use of high-rise topographic features for optimal aerial base station placement,” IEEE Transactions on Wireless Communications, vol. 22, no. 3, pp. 1868–1884, 2023
work page 2023
-
[8]
Optimal placement of aerial base station utilizing topographic features,
Y. Cho, J. Won, D.-Y. Kim, and J.-W. Lee, “Optimal placement of aerial base station utilizing topographic features,” IEEE Internet of Things Journal, vol. 12, no. 12, pp. 19 882–19 900, 2025
work page 2025
-
[9]
Spatially Consistent Air-to-Ground Channel Mod- eling and Simulation via 3D Shadow Projections,
E. Vinogradov, A. Fakhreddine, A. Saboor, S. Abadal, and S. Pollin, “Spatially Consistent Air-to-Ground Channel Mod- eling and Simulation via 3D Shadow Projections,” in 2026 International Conference on Computing, Networking and Com- munications (ICNC), 2026
work page 2026
-
[10]
Cellular network design for uav corridors via data-driven high-dimensional bayesian optimization,
M. Benzaghta, G. Geraci, D. López-Pérez, and A. Valcarce, “Cellular network design for uav corridors via data-driven high-dimensional bayesian optimization,” IEEE Transactions on Wireless Communications, vol. 24, no. 9, pp. 7530–7545, 2025
work page 2025
-
[11]
D. Lee, O. Ozdemir, R. Asokan, and I. Guvenc, “Analysis and prediction of coverage and channel rank for uav networks in rural scenarios with foliage,” IEEE Open Journal of Vehicular Technology, vol. 6, pp. 1943–1962, 2025
work page 1943
-
[12]
Millimeter-wave UA V channel model with height-dependent path loss and shadowing in urban scenarios,
A. Saboor and E. Vinogradov, “Millimeter-wave UA V channel model with height-dependent path loss and shadowing in urban scenarios,” 2025. [Online]. A vailable: https://arxiv.org/ abs/2511.10763
work page internal anchor Pith review arXiv 2025
-
[13]
Measurement-based modeling and analysis of uav air-ground channels at 1 and 4 ghz,
Z. Cui, C. Briso-Rodríguez, K. Guan, C. Calvo-Ramírez, B. Ai, and Z. Zhong, “Measurement-based modeling and analysis of uav air-ground channels at 1 and 4 ghz,” IEEE Antennas and Wireless Propagation Letters, vol. 18, no. 9, pp. 1804–1808, 2019
work page 2019
-
[14]
A formulation of the log-logistic distribution for fading channel modeling,
I. Sánchez and F. J. López-Martínez, “A formulation of the log-logistic distribution for fading channel modeling,” Electronics, vol. 11, no. 15, 2022. [Online]. A vailable: https://www.mdpi.com/2079-9292/11/15/2409
work page 2022
-
[15]
A. Saboor, Z. Cui, A. Colpaert, E. Vinogradov, W. Joseph, and S. Pollin, “Trajectory-aware air-to-ground channel characteriza- tion for low-altitude UA Vs using mamimo measurements,” IEEE Transactions on Vehicular Technology, pp. 1–16, 2026
work page 2026
-
[16]
A measurement based shadow fading model for vehicle- to-vehicle network simulations,
T. Abbas, K. Sjöberg, J. Karedal, and F. Tufvesson, “A measurement based shadow fading model for vehicle- to-vehicle network simulations,” International Journal of Antennas and Propagation, vol. 2015, no. 1, p. 190607,
work page 2015
-
[17]
A vailable: https://onlinelibrary.wiley.com/doi/ abs/10.1155/2015/190607
[Online]. A vailable: https://onlinelibrary.wiley.com/doi/ abs/10.1155/2015/190607
-
[18]
Study on channel model for frequencies from 0.5 to 100 GHz, document TR 38.901,
“Study on channel model for frequencies from 0.5 to 100 GHz, document TR 38.901,” 3rd Generation Partnership Project, Technical Specification Group Radio Access Network, 2026
work page 2026
-
[19]
Spa- tially consistent air-to-ground channel modeling with probabilis- tic LOS/NLOS segmentation,
E. Vinogradov, A. Saboor, Z. Cui, and A. Fakhreddine, “Spa- tially consistent air-to-ground channel modeling with probabilis- tic LOS/NLOS segmentation,” in 2025 IEEE 101st Vehicular Technology Conference (VTC2025-Spring), 2025, pp. 1–5
work page 2025
-
[20]
User Equipment (UE) radio transmission and reception, doc- ument 38.101,
“User Equipment (UE) radio transmission and reception, doc- ument 38.101,” 3rd Generation Partnership Project, Technical Specification Group Radio Access Network, 2018
work page 2018
-
[21]
Air-to- Ground Channel Model for Pedestrian and Vehicle Users in General Urban Environments,
A. Saboor, Z. Cui, E. Vinogradov, and S. Pollin, “Air-to- Ground Channel Model for Pedestrian and Vehicle Users in General Urban Environments,” IEEE Antennas and Wireless Propagation Letters, vol. 24, no. 1, pp. 227–231, 2025
work page 2025
-
[22]
3D Non- Stationary Channel Measurement and Analysis for MaMIMO- UA V Communications,
A. Colpaert, Z. Cui, E. Vinogradov, and S. Pollin, “3D Non- Stationary Channel Measurement and Analysis for MaMIMO- UA V Communications,” IEEE Transactions on Vehicular Tech- nology, vol. 73, no. 5, pp. 6061–6072, 2024
work page 2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.