Distributed Synchronisation of Heterogeneous Dynamical Networks With Nonlinear Diffusive Couplings
Pith reviewed 2026-05-19 22:22 UTC · model grok-4.3
The pith
Relative dissipativity between adjacent agents yields local conditions for output synchronization in heterogeneous networks with nonlinear couplings.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By exploiting relative dissipativity properties between adjacent agents, distributed conditions are established to guarantee output synchronisation in heterogeneous dynamical networks with nonlinear diffusive couplings in the presence of disturbances on the coupling links. These conditions can be verified using only local information associated with neighbouring agents and coupling links.
What carries the argument
Relative dissipativity properties between adjacent agents, which enable the derivation of distributed synchronization conditions that depend solely on neighboring information.
If this is right
- Output synchronization is achieved without requiring global knowledge of the network.
- Conditions remain valid despite disturbances on the coupling links.
- The method applies to heterogeneous agents, not just identical ones.
- Verification uses only local data from neighbors and links.
Where Pith is reading between the lines
- This local verification could simplify the design of synchronization protocols for very large networks where global analysis is infeasible.
- Similar relative properties might be identifiable in other coupling types or system classes beyond oscillators.
- Practical implementation could involve online estimation of dissipativity from observed neighbor behaviors.
Load-bearing premise
Relative dissipativity properties between adjacent agents must exist and be characterizable from local information alone.
What would settle it
Observing a heterogeneous network of agents where local relative dissipativity conditions hold but output synchronization does not occur under added disturbances on couplings would falsify the claim.
Figures


read the original abstract
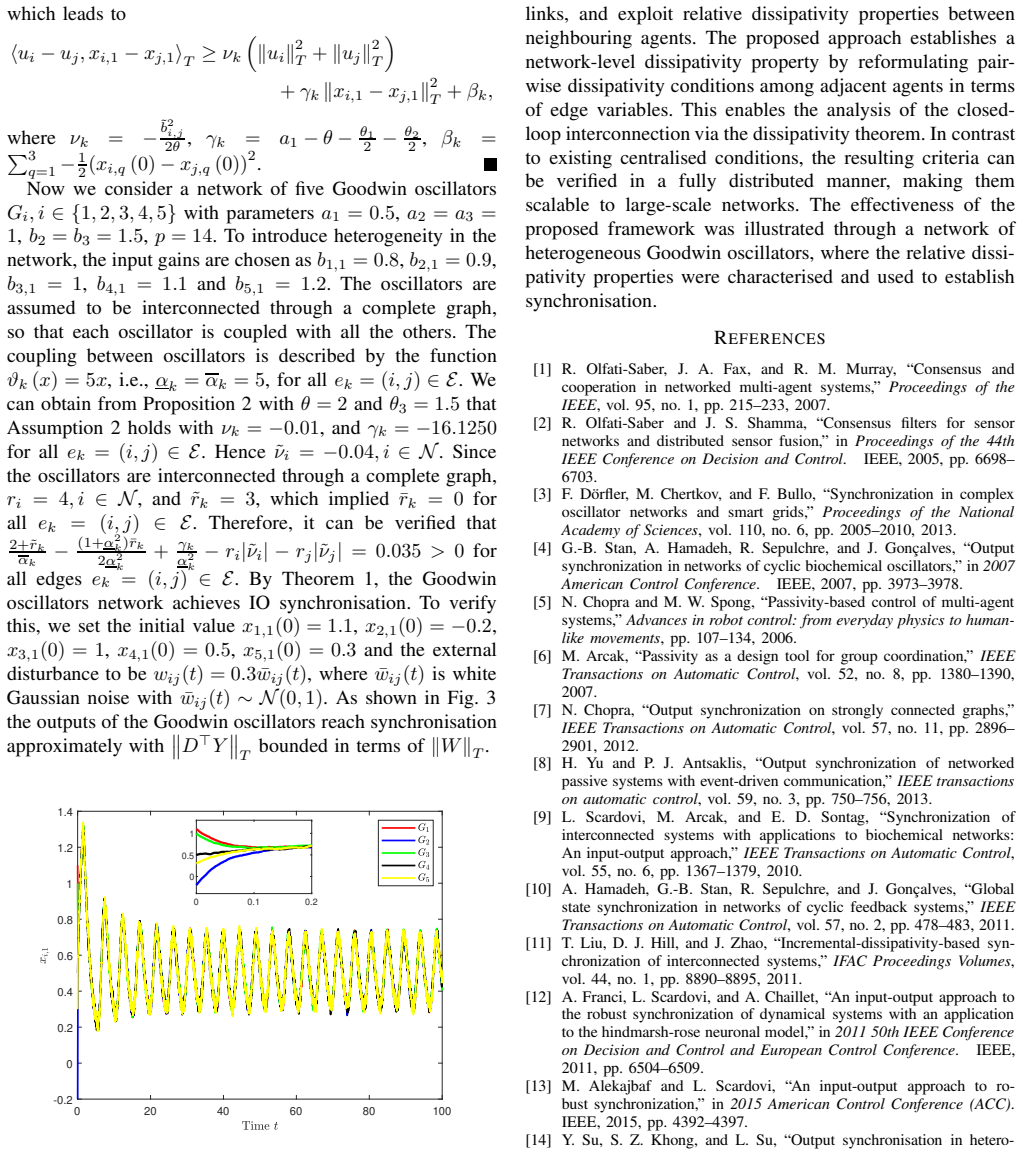
This letter investigates the problem of output synchronisation in heterogeneous dynamical networks with nonlinear diffusive couplings in the presence of disturbances on the coupling links. By exploiting relative dissipativity properties between adjacent agents, distributed conditions are established to guarantee output synchronisation. Specifically, these conditions can be verified using only local information associated with neighbouring agents and coupling links. As an illustration, a heterogeneous network of Goodwin oscillators is considered, where the relative dissipativity properties between neighbouring oscillators are characterised and used to analyse synchronisation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. This letter investigates output synchronization in heterogeneous dynamical networks with nonlinear diffusive couplings subject to disturbances on the coupling links. By exploiting relative dissipativity properties between adjacent agents, it establishes distributed conditions to guarantee output synchronization, with the explicit claim that these conditions can be verified using only local information associated with neighboring agents and coupling links. The approach is illustrated by characterizing relative dissipativity in a heterogeneous network of Goodwin oscillators and using it to analyze synchronization.
Significance. If the central claims hold, the work would advance distributed control theory by offering a framework for synchronization in heterogeneous networks that avoids global knowledge or centralized computation, with relevance to applications involving nonlinear couplings and link disturbances. The emphasis on local verifiability using relative properties between neighbors is a potentially valuable contribution if the supporting derivations are complete.
major comments (2)
- [§3] §3 (Distributed Conditions): The main theorem asserts that relative dissipativity between adjacent agents yields distributed synchronization conditions verifiable with only local information on neighbors and links. However, the proof sketch does not supply an explicit decentralized procedure for finding or verifying the required storage functions and supply rates when the agents are heterogeneous and the coupling is nonlinear; standard dissipativity analysis for the difference system typically requires simultaneous knowledge of both vector fields and the coupling function, which contradicts the 'local only' claim unless additional assumptions are stated.
- [§4] §4 (Goodwin Oscillator Example): The characterization of relative dissipativity parameters for neighboring oscillators is presented as local, yet the explicit forms derived appear to depend on the specific nonlinear coupling function and the full state-space models of both agents. This raises the question whether the example actually demonstrates a general local verification method or merely verifies the property post-hoc for the chosen parameters.
minor comments (2)
- The notation for the relative storage function and supply rate in the dissipativity inequality should be introduced with a clear definition before its first use in the main theorem.
- Figure 1 (network topology) would benefit from explicit labeling of the heterogeneous agent parameters to aid readability.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which help clarify the presentation of our distributed conditions. We address each major comment below and indicate the revisions made to strengthen the manuscript.
read point-by-point responses
-
Referee: [§3] §3 (Distributed Conditions): The main theorem asserts that relative dissipativity between adjacent agents yields distributed synchronization conditions verifiable with only local information on neighbors and links. However, the proof sketch does not supply an explicit decentralized procedure for finding or verifying the required storage functions and supply rates when the agents are heterogeneous and the coupling is nonlinear; standard dissipativity analysis for the difference system typically requires simultaneous knowledge of both vector fields and the coupling function, which contradicts the 'local only' claim unless additional assumptions are stated.
Authors: We appreciate this observation on the proof. Relative dissipativity is defined pairwise for each adjacent pair, so verification uses only the two agents' local dynamics and the coupling function on that specific link. In the revised manuscript, we have expanded the proof of the main theorem to include an explicit decentralized procedure: neighboring agents independently select storage functions (e.g., by solving local dissipation inequalities) and supply rates based solely on their vector fields, the nonlinear coupling, and link disturbances. This edge-wise approach requires no global network knowledge or other agents' models, thereby upholding the local-only claim without additional assumptions. revision: yes
-
Referee: [§4] §4 (Goodwin Oscillator Example): The characterization of relative dissipativity parameters for neighboring oscillators is presented as local, yet the explicit forms derived appear to depend on the specific nonlinear coupling function and the full state-space models of both agents. This raises the question whether the example actually demonstrates a general local verification method or merely verifies the property post-hoc for the chosen parameters.
Authors: The example illustrates application of the general conditions to a heterogeneous network of Goodwin oscillators. The derived parameters necessarily depend on the local models and coupling, as this is inherent to the verification procedure for nonlinear systems. We have revised Section 4 to explicitly describe the steps of the local method applied here, emphasizing that each neighboring pair can perform this characterization independently using only information associated with themselves and their link. This is not post-hoc verification but a concrete instance of the distributed procedure; the specific forms demonstrate feasibility rather than limit generality. revision: partial
Circularity Check
No significant circularity; derivation is self-contained via local dissipativity analysis
full rationale
The paper derives distributed synchronization conditions by exploiting relative dissipativity properties between adjacent agents in heterogeneous networks with nonlinear diffusive couplings. These properties are characterized from local information on neighboring agents and coupling links, as stated in the abstract, and illustrated concretely with Goodwin oscillators without reducing any central claim to a fitted parameter, self-definition, or load-bearing self-citation. The conditions are presented as verifiable independently using only local data, with no equations shown to be equivalent by construction to the inputs or prior results from the same authors. This constitutes a standard independent derivation against external benchmarks of dissipativity theory.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Relative dissipativity properties exist between adjacent agents and can be used to establish synchronization conditions
Reference graph
Works this paper leans on
-
[1]
Consensus a nd cooperation in networked multi-agent systems,
R. Olfati-Saber, J. A. Fax, and R. M. Murray, “Consensus a nd cooperation in networked multi-agent systems,” Proceedings of the IEEE, vol. 95, no. 1, pp. 215–233, 2007
work page 2007
-
[2]
Consensus filters for s ensor networks and distributed sensor fusion,
R. Olfati-Saber and J. S. Shamma, “Consensus filters for s ensor networks and distributed sensor fusion,” in Proceedings of the 44th IEEE Conference on Decision and Control . IEEE, 2005, pp. 6698– 6703
work page 2005
-
[3]
Synchronization in complex oscillator networks and smart grids,
F. D¨ orfler, M. Chertkov, and F. Bullo, “Synchronization in complex oscillator networks and smart grids,” Proceedings of the National Academy of Sciences , vol. 110, no. 6, pp. 2005–2010, 2013
work page 2005
-
[4]
Output synchronization in networks of cyclic biochemical oscilla tors,
G.-B. Stan, A. Hamadeh, R. Sepulchre, and J. Gonc ¸alves, “Output synchronization in networks of cyclic biochemical oscilla tors,” in 2007 American Control Conference . IEEE, 2007, pp. 3973–3978
work page 2007
-
[5]
Passivity-based control of mu lti-agent systems,
N. Chopra and M. W. Spong, “Passivity-based control of mu lti-agent systems,” Advances in robot control: from everyday physics to human- like movements , pp. 107–134, 2006
work page 2006
-
[6]
Passivity as a design tool for group coordinat ion,
M. Arcak, “Passivity as a design tool for group coordinat ion,” IEEE Transactions on Automatic Control , vol. 52, no. 8, pp. 1380–1390, 2007
work page 2007
-
[7]
Output synchronization on strongly connect ed graphs,
N. Chopra, “Output synchronization on strongly connect ed graphs,” IEEE Transactions on Automatic Control , vol. 57, no. 11, pp. 2896– 2901, 2012
work page 2012
-
[8]
Output synchronization of net worked passive systems with event-driven communication,
H. Y u and P . J. Antsaklis, “Output synchronization of net worked passive systems with event-driven communication,” IEEE transactions on automatic control , vol. 59, no. 3, pp. 750–756, 2013
work page 2013
-
[9]
L. Scardovi, M. Arcak, and E. D. Sontag, “Synchronizatio n of interconnected systems with applications to biochemical n etworks: An input-output approach,” IEEE Transactions on Automatic Control , vol. 55, no. 6, pp. 1367–1379, 2010
work page 2010
-
[10]
Global state synchronization in networks of cyclic feedback syste ms,
A. Hamadeh, G.-B. Stan, R. Sepulchre, and J. Gonc ¸alves , “Global state synchronization in networks of cyclic feedback syste ms,” IEEE Transactions on Automatic Control, vol. 57, no. 2, pp. 478–483, 2011
work page 2011
-
[11]
Incremental-dissipati vity-based syn- chronization of interconnected systems,
T. Liu, D. J. Hill, and J. Zhao, “Incremental-dissipati vity-based syn- chronization of interconnected systems,” IF AC Proceedings V olumes, vol. 44, no. 1, pp. 8890–8895, 2011
work page 2011
-
[12]
A. Franci, L. Scardovi, and A. Chaillet, “An input-outp ut approach to the robust synchronization of dynamical systems with an app lication to the hindmarsh-rose neuronal model,” in 2011 50th IEEE Conference on Decision and Control and European Control Conference . IEEE, 2011, pp. 6504–6509
work page 2011
-
[13]
An input-output approac h to ro- bust synchronization,
M. Alekajbaf and L. Scardovi, “An input-output approac h to ro- bust synchronization,” in 2015 American Control Conference (ACC) . IEEE, 2015, pp. 4392–4397
work page 2015
-
[14]
Output synchronisation in hetero- geneous networks with nonlinear couplings,
Y . Su, S. Z. Khong, and L. Su, “Output synchronisation in hetero- geneous networks with nonlinear couplings,” IEEE Transactions on Control of Network Systems , 2025
work page 2025
-
[15]
S. Welikala, H. Lin, and P . J. Antsaklis, “A decentraliz ed control synthesis approach for networked systems with arbitrary in terconnec- tions,” IEEE Transactions on Automatic Control , vol. 69, no. 12, pp. 8465–8480, 2024
work page 2024
-
[16]
Consensus in plug-and-pla y heteroge- neous dynamical networks: A passivity compensation approa ch,
Y . Su, S. Z. Khong, and L. Su, “Consensus in plug-and-pla y heteroge- neous dynamical networks: A passivity compensation approa ch,” arXiv preprint arXiv:2603.14516, 2026
-
[17]
V an der Schaft, L2-gain and passivity techniques in nonlinear control
A. V an der Schaft, L2-gain and passivity techniques in nonlinear control. Springer, 2000
work page 2000
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.