On Generic Linearly Constrained Frameworks
Pith reviewed 2026-05-19 22:17 UTC · model grok-4.3
The pith
Extending rigidity characterizations to matroid rank functions provides sufficient conditions for global rigidity of looped simple graphs in any dimension.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Under the hypothesis that each vertex is incident to sufficiently many loops, the rank function of the linearly constrained rigidity matroid admits a characterization that extends the known rigidity criterion, and this rank characterization directly supplies sufficient conditions for a looped simple graph to be globally rigid in R^d for all d at least 2.
What carries the argument
The rank function of the linearly constrained rigidity matroid, which encodes linear dependencies among bar lengths and loop-induced affine constraints.
If this is right
- A looped graph whose matroid rank equals the expected maximum is rigid, and the rank characterization supplies an explicit test for this property.
- Global rigidity follows whenever the rank condition is satisfied together with an additional connectivity requirement derived from the matroid.
- In two dimensions the same method produces a strictly stronger sufficient condition than the existing rigidity characterization.
- The discharging method becomes available for proving further combinatorial properties of these constrained matroids.
Where Pith is reading between the lines
- The same rank-function approach could be tested on frameworks whose constraints are not affine subspaces.
- Efficient algorithms for verifying the sufficient conditions might follow from adapting pebble-game techniques already used in ordinary rigidity.
- The results suggest a possible route to necessary and sufficient conditions if the loop hypothesis can be relaxed.
Load-bearing premise
The configuration must be generic and every vertex must carry enough loops for the earlier rigidity characterization to carry over to the full matroid rank.
What would settle it
A concrete looped graph that meets the paper's sufficient conditions yet fails to be globally rigid, or whose actual matroid rank differs from the predicted value, would falsify the central claim.
Figures






read the original abstract
A linearly constrained framework in $\mathbb{R}^d$ is a bar-joint framework where, in addition, vertices with loops are constrained to lie in given affine subspaces. In the generic case, when each vertex is incident to sufficiently many loops, a characterisation of rigidity was obtained by Jackson, Nixon and Tanigawa for all $d\geq 3$. By extending this to characterise the rank function of the linearly constrained rigidity matroid (under the same loop hypothesis), sufficient conditions for a looped simple graph to be (globally) rigid in $\mathbb{R}^d$ are obtained. In the 2-dimensional case generic rigidity was characterised by Streinu and Theran, and we obtain a sharper sufficient condition in this case. A key technique is the application of the discharging method.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper extends the Jackson-Nixon-Tanigawa characterization of generic rigidity for linearly constrained frameworks in R^d (d ≥ 3), under the per-vertex loop hypothesis, to a full description of the rank function of the associated matroid. From this rank formula it derives sufficient conditions for global rigidity of looped simple graphs. In the 2-dimensional case it obtains a sharper sufficient condition building on the Streinu-Theran characterization. The discharging method is used as a key technical tool inside the generic setting.
Significance. If the rank-function extension holds, the work supplies a combinatorial criterion that strengthens existing sufficient conditions for global rigidity in the linearly constrained setting. This is potentially useful for applications in rigidity theory and could serve as a foundation for further matroidal results. The explicit use of discharging to obtain the rank formula is a concrete technical contribution that can be checked independently of the global-rigidity corollaries.
major comments (2)
- [§4, Theorem 4.3] §4, Theorem 4.3 (rank-function statement): the claimed equality between the matroid rank and the minimum of the two expressions involving the number of loops and the sparsity count must be verified to hold for every subset; the discharging argument in the proof appears to handle only the maximal case and requires an explicit reduction step for proper subsets.
- [§5, Corollary 5.2] §5, Corollary 5.2 (global-rigidity sufficient condition): the derivation from the rank formula to global rigidity invokes the loop hypothesis at every vertex; it is unclear whether the same numerical bound on loops remains sufficient when some vertices have exactly the minimal number required by the Jackson-Nixon-Tanigawa hypothesis, or whether an extra loop is needed.
minor comments (3)
- [§2] Notation: the symbol r_L for the linearly constrained rank function is introduced in §2 but used without re-statement in the statements of Theorems 4.1 and 4.3; a one-line reminder would improve readability.
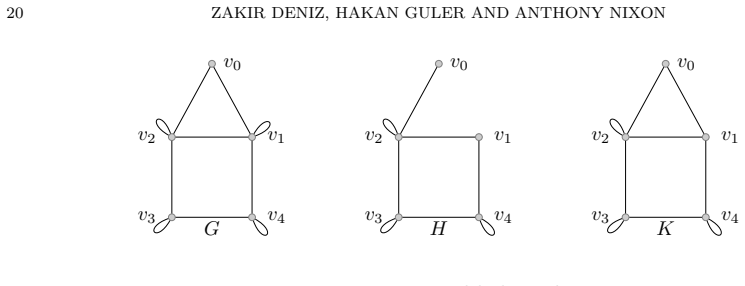
- [Figure 1] Figure 1: the caption does not indicate whether the depicted framework satisfies the generic-position assumption or the loop-count hypothesis; adding this information would clarify the illustrative purpose of the figure.
- [References] Reference list: the citation to Streinu-Theran is given only for the 2-dimensional rigidity characterization; the paper should also cite the follow-up work on global rigidity in the same setting if it exists.
Simulated Author's Rebuttal
We thank the referee for their careful reading of the manuscript and for the constructive comments. We respond to each major comment below.
read point-by-point responses
-
Referee: [§4, Theorem 4.3] §4, Theorem 4.3 (rank-function statement): the claimed equality between the matroid rank and the minimum of the two expressions involving the number of loops and the sparsity count must be verified to hold for every subset; the discharging argument in the proof appears to handle only the maximal case and requires an explicit reduction step for proper subsets.
Authors: We thank the referee for this observation. The discharging argument is formulated for an arbitrary vertex subset by first maximising the independent set inside the induced subgraph and then invoking submodularity of the underlying sparsity count to obtain the rank equality on that subset. To remove any ambiguity we have inserted an explicit reduction paragraph immediately after the discharging calculation in the proof of Theorem 4.3, showing how the maximal-case identity extends to every proper subset. revision: yes
-
Referee: [§5, Corollary 5.2] §5, Corollary 5.2 (global-rigidity sufficient condition): the derivation from the rank formula to global rigidity invokes the loop hypothesis at every vertex; it is unclear whether the same numerical bound on loops remains sufficient when some vertices have exactly the minimal number required by the Jackson-Nixon-Tanigawa hypothesis, or whether an extra loop is needed.
Authors: The numerical bound in Corollary 5.2 is calibrated so that the total number of loops forces every vertex to satisfy the Jackson-Nixon-Tanigawa per-vertex hypothesis (at least the minimal number required for the rank formula to apply). When a vertex meets exactly this minimum, the rank formula still guarantees the necessary independence and connectivity properties used in the global-rigidity argument. We have added a short clarifying remark in the proof of the corollary stating that no additional loop beyond the hypothesis is required. revision: yes
Circularity Check
No significant circularity; derivation self-contained under stated assumptions
full rationale
The paper explicitly cites the Jackson-Nixon-Tanigawa characterization of rigidity (under the per-vertex loop hypothesis) as the starting point and then extends it to a description of the matroid rank function, from which global-rigidity sufficient conditions are derived. This extension is presented as new combinatorial work that employs the discharging method inside the generic setting already fixed by the cited result. Because the central claim is an independent extension rather than a re-derivation or renaming of the input characterization, and because the loop hypothesis is stated as an explicit modeling assumption rather than smuggled in as a hidden premise, the derivation chain does not reduce to its own inputs by construction. No self-definitional, fitted-prediction, or load-bearing self-citation reductions are exhibited in the abstract or described argument structure.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Generic position of the framework in R^d together with each vertex incident to sufficiently many loops
Reference graph
Works this paper leans on
-
[1]
Abbot, Generalizations of Kempe’s Universality Theorem
T.G. Abbot, Generalizations of Kempe’s Universality Theorem. MSc thesis, MIT (2008). http://web.mit.edu/tabbott/www/papers/mthesis.pdf
work page 2008
-
[2]
D. Antolini, S. Dewar and S.-I. Tanigawa, Dilworth truncations and Hadamard products of linear spaces to appear in: SIAM Journal on Disc. Math., https://arxiv.org/pdf/2508.04798
-
[3]
L. Asimow and B. Roth, The rigidity of graphs, Trans. Am. Math. Soc. 245 (1978), 279-289
work page 1978
-
[4]
J. Cruickshank, H. Guler, B. Jackson and A. Nixon, Rigidity of Linearly Constrained Frameworks, International Mathematics Research Notices 12 (2020), 3824–3840
work page 2020
-
[5]
J. Cruickshank, F. Mohammadi, H. J. Motwani, A. Nixon, and S.-I. Tanigawa, Global Rigidity of Line Constrained Frameworks, SIAM Journal on Disc. Math. 38 (2024), 743-763
work page 2024
-
[6]
Frank D. J. Dunstan, Matroids and submodular functions, The Quarterly Journal of Mathematics, 27(3)(1976), 339–348
work page 1976
-
[7]
J. Edmonds, Submodular functions, matroids, and certain polyhedra, in: Combinatorial Structures and their Applications ,R. Guy, H. Hanani, N. Sauer, and J. Sch¨ onheim (Eds.), Gordon and Breach, New York, (1970), pp. 69-87
work page 1970
-
[8]
J. Edmonds, Gian-Carlo Rota, Submodular set functions, in: Proceeding of the Waterloo Combinatorics Conference (1966)
work page 1966
-
[9]
A. Frank, Connections in Combinatorial Optimization, Oxford Lecture Series in Mathematics and Its Applications 38, Oxford University Press, New York, 2011
work page 2011
-
[10]
X. Gu, W. Meng, M. Rolek, Y. Wang, and G. Yu, Sufficient Conditions for 2-Dimensional Global Rigidity, SIAM Journal on Disc. Math. 35(4) (2021) 2520-2534
work page 2021
-
[11]
H. Guler, A sufficient connectivity condition for rigidity and global rigidity of linearly constrained frameworks inR 2, Disc. App. Math. 326(1) (2023) 37-46
work page 2023
- [12]
-
[13]
B. Jackson, T. Jord´ an, Connected rigidity matroids and unique realizations of graphs, J. Comb. Theory Series B 94 (2005) 1-29
work page 2005
-
[14]
B. Jackson, A. Nixon and S.-I. Tanigawa, An Improved Bound for the Rigidity of Linearly Constrained Frameworks, SIAM Journal on Disc. Math. 35(2) (2021) 928–933
work page 2021
-
[15]
Laman, On graphs and rigidity of plane skeletal structures, J
G. Laman, On graphs and rigidity of plane skeletal structures, J. Engineering Math. 4 (1970), 331-340
work page 1970
-
[16]
L. Lov´ asz and Y. Yemini, On generic rigidity in the plane, SIAM J. Algebraic Discrete Methods 3 (1982), 91-98
work page 1982
-
[17]
Lucas, R´ ecr´ eations Math´ ematiques, four volumes,Gauthier-Villars, Paris, 1882-1894
E. Lucas, R´ ecr´ eations Math´ ematiques, four volumes,Gauthier-Villars, Paris, 1882-1894
-
[18]
H. Pollaczek-Geiringer, ¨Uber die Gliederung ebener Fachwerke, Zeitschrift f¨ ur, Angewandte Mathematik und Mechanik (ZAMM) 7 (1927), 58-72
work page 1927
-
[19]
J. Saxe, Embeddability of weighted graphs in k-space is strongly NP-hard, In Seventeenth Annual Allerton Conference on Communication, Control, and Computing, Proceedings of the Conference held in Monticello, Ill., October 10-12, 1979
work page 1979
-
[20]
I. Streinu and L. Theran, Slider-pinning rigidity: a Maxwell-Laman-type theorem, Discrete and Com- putational Geometry, 44 (2010) 812–837. ON GENERIC LINEARLY CONSTRAINED FRAMEWORKS 29 Department of Mathematics, D ¨uzce University, D ¨uzce, 81620, T ¨urk˙iye. Email address:zakirdeniz@duzce.edu.tr Department of Mathematics, Kastamonu University, Kastamonu,...
work page 2010
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.