On Improving Multimodal Pedestrian Trajectory Prediction with CVAE: A Study on Benchmark and Robot Data
Pith reviewed 2026-05-20 09:42 UTC · model grok-4.3
The pith
Adding a CVAE to Social-STGCNN enables explicit modeling of multimodal pedestrian trajectories with gains in diversity and endpoint consistency.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
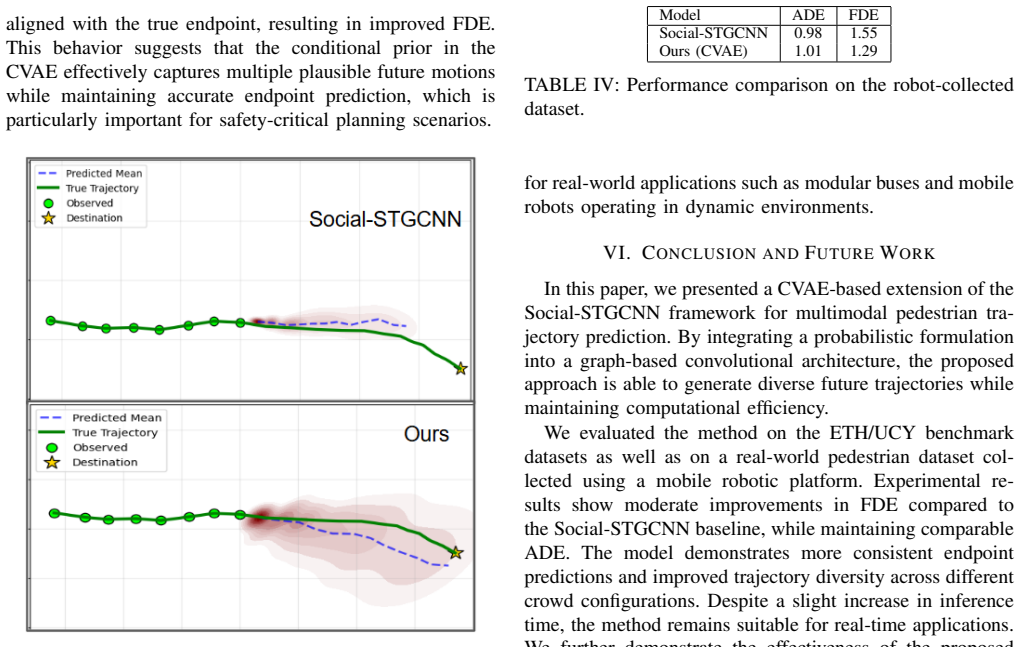
By layering a CVAE probabilistic head on the Social-STGCNN architecture the method generates multiple plausible future trajectories conditioned on observed motion and social context, yielding more consistent endpoint accuracy and greater trajectory variety across crowd densities on both standard benchmarks and a mobile-robot dataset.
What carries the argument
The CVAE probabilistic formulation that conditions on past trajectories and social interactions to sample multiple plausible futures.
If this is right
- Moderate accuracy gains appear on the ETH and UCY benchmarks.
- Endpoint errors become more consistent across different crowd configurations.
- Trajectory samples cover a wider range of plausible futures than the backbone alone.
- Performance holds when evaluated on real data gathered by a mobile robot.
Where Pith is reading between the lines
- The approach may support safer long-horizon planning for delivery robots operating among pedestrians.
- Similar conditioning could be tried with other graph-based backbones to test generality.
- Collecting additional robot datasets in varied lighting or weather would help verify transfer.
Load-bearing premise
The CVAE addition produces well-calibrated multimodal outputs without dataset-specific tuning that would fail to transfer to new robot deployments.
What would settle it
Run the model unchanged on a new robot platform in an unseen suburban environment and check whether the sampled trajectories remain diverse and endpoint-accurate relative to the baseline.
Figures





read the original abstract
Accurate pedestrian trajectory prediction is crucial for autonomous systems operating in complex environments, such as modular buses and delivery robots in suburban or semi-structured areas. Social Spatio-Temporal Graph Convolutional Neural Networks (Social-STGCNN) have shown strong performance by modeling social interactions; however, producing diverse and well-calibrated future trajectories remains challenging. In this work, we build on a Social-STGCNN backbone and introduce a Conditional Variational Autoencoder (CVAE)-based probabilistic formulation to explicitly model multimodal future trajectories. We evaluate the method on the ETH and UCY pedestrian trajectory datasets as well as on a real-world pedestrian dataset collected by a mobile robot. Results show moderate gains on public benchmarks, but more consistent endpoint accuracy and improved trajectory diversity across different crowd configurations. Evaluation on robot-collected data further demonstrates the approach's effectiveness beyond curated benchmarks and supports its applicability in practical deployments.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes augmenting the Social-STGCNN backbone with a Conditional Variational Autoencoder (CVAE) to explicitly model multimodal pedestrian future trajectories. It evaluates the resulting model on the ETH and UCY benchmark datasets plus a real-world pedestrian dataset collected by a mobile robot, claiming moderate gains on public benchmarks together with more consistent endpoint accuracy and improved trajectory diversity across crowd configurations, with the robot data offered as evidence of practical applicability.
Significance. If the reported gains are shown to arise from well-calibrated CVAE sampling that transfers without dataset-specific post-processing, the work would supply a concrete probabilistic extension to an established graph-convolutional baseline and could modestly improve robustness for robot navigation in semi-structured pedestrian scenes. The decision to include robot-collected data is a constructive step toward deployment relevance, though the moderate scale of the claimed improvements limits the potential impact to an incremental contribution rather than a foundational advance.
major comments (2)
- [Abstract] Abstract: the central claim of 'moderate gains' and 'improved trajectory diversity' is presented without any numerical values, baseline comparisons, error bars, or ablation isolating the CVAE term; this absence directly undermines verification that the probabilistic formulation, rather than unstated implementation changes, drives the reported improvements.
- [Abstract] Abstract: no description is supplied of the CVAE conditioning on social-graph features, the KL-weighting schedule, the sampling procedure at inference, or any post-hoc selection mechanism; without these details it is impossible to assess whether the outputs are calibrated or whether the method would transfer to new robot deployments without dataset-specific adjustments.
minor comments (1)
- [Abstract] The abstract could more explicitly quantify the robot data collection protocol (sensor type, environment, number of trajectories) to strengthen the claim of applicability beyond curated benchmarks.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. We address each major comment below and have revised the manuscript to improve the clarity and completeness of the presentation.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim of 'moderate gains' and 'improved trajectory diversity' is presented without any numerical values, baseline comparisons, error bars, or ablation isolating the CVAE term; this absence directly undermines verification that the probabilistic formulation, rather than unstated implementation changes, drives the reported improvements.
Authors: We agree that the abstract would benefit from greater specificity to support the claims. In the revised manuscript we have updated the abstract to include concrete quantitative results, such as the observed reductions in average displacement error (ADE) and final displacement error (FDE) relative to the Social-STGCNN baseline on ETH/UCY, together with the reported diversity metrics. We also explicitly reference the ablation experiments in the main text that isolate the contribution of the CVAE component. Error bars from repeated runs have been added where relevant. revision: yes
-
Referee: [Abstract] Abstract: no description is supplied of the CVAE conditioning on social-graph features, the KL-weighting schedule, the sampling procedure at inference, or any post-hoc selection mechanism; without these details it is impossible to assess whether the outputs are calibrated or whether the method would transfer to new robot deployments without dataset-specific adjustments.
Authors: A complete description of the CVAE conditioning on the social-graph features produced by the STGCNN backbone, the KL-divergence weighting schedule, the inference-time sampling procedure, and the absence of post-hoc selection is already provided in Section 3 of the manuscript. To address the referee's concern about the abstract, we have added a concise sentence summarizing the CVAE integration and direct sampling approach. This revision improves accessibility without duplicating the full technical details, which remain in the methods section for readers concerned with calibration and transfer to new deployments. revision: partial
Circularity Check
No circularity: empirical evaluation of CVAE addition to existing backbone is self-contained
full rationale
The paper extends a published Social-STGCNN backbone with a standard CVAE probabilistic head to produce multimodal trajectory samples, then reports empirical metrics (endpoint accuracy, diversity) on ETH/UCY and a separate robot-collected dataset. No equations, fitting procedures, or self-citations are shown that would make the reported gains equivalent to the inputs by construction; the CVAE is presented as an additive modeling choice whose calibration is assessed externally via benchmark performance rather than defined into the result. This is the normal case of an incremental empirical study whose central claim remains falsifiable outside the paper's own fitted values.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Social interactions among pedestrians can be effectively captured by spatio-temporal graph convolutions
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We build on a Social-STGCNN backbone and introduce a Conditional Variational Autoencoder (CVAE)-based probabilistic formulation... L = L_rec + w_KL L_KL ... reconstruction loss ... negative log-likelihood of a bivariate Gaussian
-
IndisputableMonolith/Foundation/ArithmeticFromLogic.leanLogicNat recovery unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
latent transition length ... 20 ... prior network ... recognition network ... KL annealing
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Safety in pedestrian navigation: Road crossing habits and route quality needs,
S. Schwarz, D. Sellitsch, M. Tscheligi, and C. Olaverri-Monreal, “Safety in pedestrian navigation: Road crossing habits and route quality needs,” inFuture Active Safety Technology Towards zero traffic accidents, FAST-zero 2015 Symposium, Gothenburg, Sweden, 2015, pp. 305–310
work page 2015
-
[2]
Social lstm: Human trajectory prediction in crowded spaces,
A. Alahi, K. Goel, V . Ramanathan, A. Robicquet, L. Fei-Fei, and S. Savarese, “Social lstm: Human trajectory prediction in crowded spaces,” inProceedings of the IEEE conference on computer vision and pattern recognition, 2016, pp. 961–971
work page 2016
-
[3]
Social gan: Socially acceptable trajectories with generative adversarial net- works,
A. Gupta, J. Johnson, L. Fei-Fei, S. Savarese, and A. Alahi, “Social gan: Socially acceptable trajectories with generative adversarial net- works,” inProceedings of the IEEE conference on computer vision and pattern recognition, 2018, pp. 2255–2264
work page 2018
-
[4]
Sophie: An attentive gan for predicting paths compliant to social and physical constraints,
A. Sadeghian, V . Kosaraju, A. Sadeghian, N. Hirose, H. Rezatofighi, and S. Savarese, “Sophie: An attentive gan for predicting paths compliant to social and physical constraints,” inProceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2019, pp. 1349–1358
work page 2019
-
[5]
Conditional generative neural system for probabilistic trajectory prediction,
J. Li, H. Ma, and M. Tomizuka, “Conditional generative neural system for probabilistic trajectory prediction,” in2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2019, pp. 6150–6156
work page 2019
-
[6]
Sr-lstm: State refinement for lstm towards pedestrian trajectory prediction,
P. Zhang, W. Ouyang, P. Zhang, J. Xue, and N. Zheng, “Sr-lstm: State refinement for lstm towards pedestrian trajectory prediction,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2019, pp. 12 085–12 094
work page 2019
-
[7]
Social-bigat: Multimodal trajectory forecasting us- ing bicycle-gan and graph attention networks,
V . Kosaraju, A. Sadeghian, R. Mart ´ın-Mart´ın, I. Reid, H. Rezatofighi, and S. Savarese, “Social-bigat: Multimodal trajectory forecasting us- ing bicycle-gan and graph attention networks,”Advances in Neural Information Processing Systems, vol. 32, 2019
work page 2019
-
[8]
A. Mohamed, K. Qian, M. Elhoseiny, and C. Claudel, “Social- stgcnn: A social spatio-temporal graph convolutional neural network for human trajectory prediction,” inProceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2020, pp. 14 424–14 432
work page 2020
-
[9]
Spatial temporal graph convolutional networks for skeleton-based action recognition,
S. Yan, Y . Xiong, and D. Lin, “Spatial temporal graph convolutional networks for skeleton-based action recognition,” inProceedings of the AAAI conference on artificial intelligence, vol. 32, no. 1, 2018
work page 2018
-
[10]
H. Zhou, D. Ren, H. Xia, M. Fan, X. Yang, and H. Huang, “Ast- gnn: An attention-based spatio-temporal graph neural network for interaction-aware pedestrian trajectory prediction,”Neurocomputing, vol. 445, pp. 298–308, 2021
work page 2021
-
[11]
Spectral temporal graph neural network for trajectory prediction,
D. Cao, J. Li, H. Ma, and M. Tomizuka, “Spectral temporal graph neural network for trajectory prediction,” in2021 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2021, pp. 1839–1845
work page 2021
-
[12]
Adaptive trajectory prediction via transferable gnn,
Y . Xu, L. Wang, Y . Wang, and Y . Fu, “Adaptive trajectory prediction via transferable gnn,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022, pp. 6520–6531
work page 2022
-
[13]
L. Li, M. Pagnucco, and Y . Song, “Graph-based spatial transformer with memory replay for multi-future pedestrian trajectory prediction,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022, pp. 2231–2241
work page 2022
-
[14]
Y . Pang, X. Zhao, J. Hu, H. Yan, and Y . Liu, “Bayesian spatio-temporal graph transformer network (b-star) for multi-aircraft trajectory predic- tion,”Knowledge-Based Systems, vol. 249, p. 108998, 2022
work page 2022
-
[15]
Humor: 3d human motion model for robust pose estimation,
D. Rempe, T. Birdal, A. Hertzmann, J. Yang, S. Sridhar, and L. J. Guibas, “Humor: 3d human motion model for robust pose estimation,” inProceedings of the IEEE/CVF international conference on computer vision, 2021, pp. 11 488–11 499
work page 2021
-
[16]
Drogon: A trajectory prediction model based on intention-conditioned behavior reasoning,
C. Choi, S. Malla, A. Patil, and J. H. Choi, “Drogon: A trajectory prediction model based on intention-conditioned behavior reasoning,” inConference on Robot Learning. PMLR, 2021, pp. 49–63
work page 2021
-
[17]
Bitrap: Bi-directional pedestrian trajectory prediction with multi- modal goal estimation,
Y . Yao, E. Atkins, M. Johnson-Roberson, R. Vasudevan, and X. Du, “Bitrap: Bi-directional pedestrian trajectory prediction with multi- modal goal estimation,”IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 1463–1470, 2021
work page 2021
-
[18]
Dynamic attention- based cvae-gan for pedestrian trajectory prediction,
Z. Zhou, G. Huang, Z. Su, Y . Li, and W. Hua, “Dynamic attention- based cvae-gan for pedestrian trajectory prediction,”IEEE Robotics and Automation Letters, vol. 8, no. 2, pp. 704–711, 2022
work page 2022
-
[19]
J. Gao, X. Shi, and J. J. Yu, “Social-dualcvae: multimodal trajectory forecasting based on social interactions pattern aware and dual con- ditional variational auto-encoder,”arXiv preprint arXiv:2202.03954, 2022
-
[20]
Human trajectory prediction via neural social physics,
J. Yue, D. Manocha, and H. Wang, “Human trajectory prediction via neural social physics,” inEuropean Conference on Computer Vision. Springer, 2022, pp. 376–394
work page 2022
-
[21]
Social-cvae: Pedestrian trajectory prediction using conditional variational auto-encoder,
B. Xu, X. Wang, S. Li, J. Li, and C. Liu, “Social-cvae: Pedestrian trajectory prediction using conditional variational auto-encoder,” inIn- ternational Conference on Neural Information Processing. Springer, 2023, pp. 476–489
work page 2023
-
[22]
X. Yang, L. Bingxian, and W. Xiangcheng, “Sgamte-net: A pedestrian trajectory prediction network based on spatiotemporal graph attention and multimodal trajectory endpoints,”Applied Intelligence, pp. 1–16, 2023
work page 2023
-
[23]
W. Zhu, Y . Liu, P. Wang, M. Zhang, T. Wang, and Y . Yi, “Tri- hgnn: Learning triple policies fused hierarchical graph neural networks for pedestrian trajectory prediction,”Pattern Recognition, p. 109772, 2023
work page 2023
-
[24]
Semi-Supervised Classification with Graph Convolutional Networks
T. N. Kipf and M. Welling, “Semi-supervised classification with graph convolutional networks,”arXiv preprint arXiv:1609.02907, 2016
work page internal anchor Pith review Pith/arXiv arXiv 2016
-
[25]
Spatio-Temporal Graph Convolutional Networks: A Deep Learning Framework for Traffic Forecasting
B. Yu, H. Yin, and Z. Zhu, “Spatio-temporal graph convolutional networks: A deep learning framework for traffic forecasting,”arXiv preprint arXiv:1709.04875, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[26]
Learning structured output represen- tation using deep conditional generative models,
K. Sohn, H. Lee, and X. Yan, “Learning structured output represen- tation using deep conditional generative models,”Advances in neural information processing systems, vol. 28, 2015
work page 2015
-
[27]
Generating Sentences from a Continuous Space
S. R. Bowman, L. Vilnis, O. Vinyals, A. M. Dai, R. Jozefowicz, and S. Bengio, “Generating sentences from a continuous space,”arXiv preprint arXiv:1511.06349, 2015
work page internal anchor Pith review Pith/arXiv arXiv 2015
-
[28]
You’ll never walk alone: Modeling social behavior for multi-target tracking,
S. Pellegrini, A. Ess, K. Schindler, and L. Van Gool, “You’ll never walk alone: Modeling social behavior for multi-target tracking,” in 2009 IEEE 12th international conference on computer vision. IEEE, 2009, pp. 261–268
work page 2009
-
[29]
A. Lerner, Y . Chrysanthou, and D. Lischinski, “Crowds by example,” inComputer graphics forum, vol. 26, no. 3. Wiley Online Library, 2007, pp. 655–664
work page 2007
-
[30]
Tutorial on variational autoencoders,
C. Doersch, “Tutorial on variational autoencoders,”arXiv preprint arXiv:1606.05908, 2016
-
[31]
N. Certad, E. Del Re, J. Varughese, and C. Olaverri-Monreal, “V2p collision warnings for distracted pedestrians: A comparative study with traditional auditory alerts,” in2025 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2025, pp. 1340–1345
work page 2025
-
[32]
Spatial pyramid pooling in deep convolutional networks for visual recognition,
K. He, X. Zhang, S. Ren, and J. Sun, “Spatial pyramid pooling in deep convolutional networks for visual recognition,”IEEE transactions on pattern analysis and machine intelligence, vol. 37, no. 9, pp. 1904– 1916, 2015
work page 1904
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.