Mapping the Fitness Landscape: A Structure-Guided Approach to Multi-Modal Optimization
Pith reviewed 2026-05-19 23:31 UTC · model grok-4.3
The pith
Chaotic decoding and persistence-guided merging on a kNN graph recovers the basin structure of multimodal landscapes to locate more distinct peaks.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
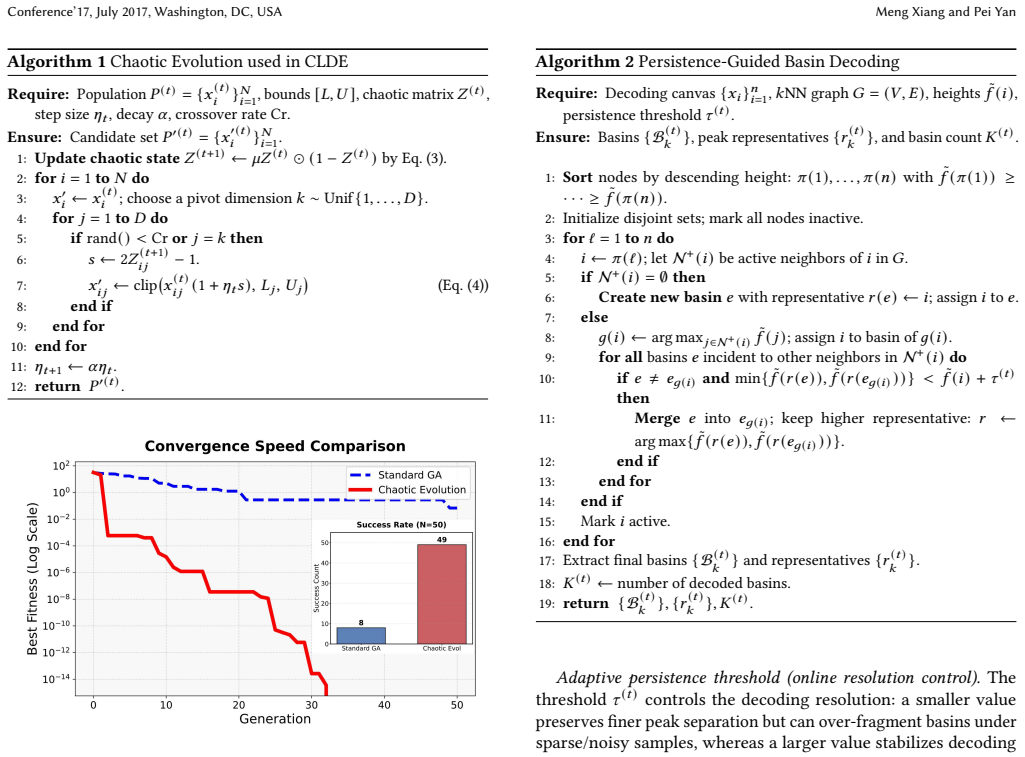
CLDE is a decision-space-centric framework that turns multimodal optimization into a closed decode–value–allocate–refine loop. It injects controlled global exploration via a logistic chaotic map with decaying step size, constructs a k-nearest-neighbor graph on a decoding canvas, and applies persistence-guided basin growing that merges peaks only when they are not separated by deep valleys. An adaptive persistence threshold tunes the decoding resolution online. Guided by the decoded structure, the method performs basin-wise selection and refinement to improve solution quality while preserving basin coverage.
What carries the argument
Persistence-guided basin growing on the k-nearest-neighbor graph, which merges peaks only across shallow valleys and uses an adaptive persistence threshold to recover the underlying peak-basin organization without over-fragmentation or over-merging.
If this is right
- CLDE-S attains higher peak ratios than prior niching methods on the 20 CEC2013 multimodal functions under the same evaluation budget.
- CLDE-M achieves competitive or superior IGD and IGDx values on the DTLZ and MMMOP suites, with larger gains on problems that have strongly multimodal structure.
- Basin-wise selection and refinement improves local solution quality inside each recovered basin while the decoded structure prevents loss of coverage across basins.
- The adaptive persistence threshold prevents both excessive splitting of single basins and erroneous merging of distinct basins during online search.
Where Pith is reading between the lines
- The same decode-value-allocate-refine loop could be inserted into other population-based methods to reduce pseudo-multimodality without redesigning their core operators.
- If the kNN graph and persistence computation remain tractable, the approach may extend to higher-dimensional decision spaces where density estimators alone become unreliable.
- Real-world expensive multimodal problems could benefit from fewer total evaluations once the basin organization is decoded early in the run.
Load-bearing premise
The k-nearest-neighbor graph combined with persistence-guided merging accurately recovers the true underlying peak-basin organization of the decision space without over-fragmentation or over-merging.
What would settle it
Apply CLDE to a synthetic multimodal test function whose exact peak locations and basin boundaries are known in advance, then measure whether the recovered basins match the ground-truth partition and whether the achieved peak ratio exceeds that of standard distance-based niching methods under identical evaluation budgets.
Figures








read the original abstract
Multimodal optimization requires finding many optima rather than merely keeping a diverse population. Yet most niching-based evolutionary algorithms rely on distances or density estimators without explicitly recovering the underlying peak--basin organization in the decision space, which can lead to pseudo-multimodality: many distinct individuals ultimately collapse into only a few basins. We introduce Chaotic Landscape-Decoding Evolution (CLDE), a decision-space-centric framework that turns multimodal search into a closed loop of decode--value--allocate--refine. CLDE injects controlled global exploration via a logistic chaotic map with a decaying step size, then builds a $k$-nearest-neighbor graph on a decoding canvas and performs persistence-guided basin growing that merges peaks only when they are not separated by deep valleys. An adaptive persistence threshold continuously tunes the decoding resolution online to avoid over-fragmentation and over-merging. Guided by the decoded structure, CLDE carries out basin-wise selection and refinement to improve solution quality while preserving basin coverage. We instantiate CLDE as CLDE-S and CLDE-M for single- and multi-objective multimodal optimization. Experiments on 20 CEC2013 functions show that CLDE-S achieves strong peak ratio under the same evaluation budget, while on DTLZ and MMMOP suites CLDE-M attains competitive IGD/IGDx, with pronounced gains on strongly multimodal problems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces Chaotic Landscape-Decoding Evolution (CLDE), a decision-space-centric framework for multimodal optimization. It frames the problem as a closed decode–value–allocate–refine loop that injects exploration via a logistic chaotic map, constructs a k-nearest-neighbor graph on a decoding canvas, and applies persistence-guided basin growing with an adaptive threshold to recover peak–basin structure. Basin-wise selection and refinement then improve solution quality while preserving coverage. Instantiations CLDE-S and CLDE-M are evaluated on 20 CEC2013 functions (peak ratio) and on DTLZ/MMMOP suites (IGD/IGDx), with reported gains on strongly multimodal instances.
Significance. If the persistence-guided merging step reliably recovers the underlying basin organization, the approach could improve upon distance- or density-based niching by explicitly mapping decision-space structure, potentially reducing pseudo-multimodality. The combination of chaotic exploration and online adaptive resolution is a concrete technical contribution that could be tested on other multimodal benchmarks.
major comments (2)
- [Method (decode-value-allocate-refine loop)] Method section (decode–value–allocate–refine loop and persistence-guided basin growing): the claim that the k-NN graph plus persistence-guided merging recovers the true peak–basin organization without systematic over-fragmentation or over-merging is load-bearing for attributing performance gains to structure recovery. No quantitative validation (e.g., basin-count error, boundary fidelity, or recovery rate) is supplied against ground-truth multimodal landscapes whose basins are known analytically or by exhaustive sampling.
- [Experiments] Experimental results (CEC2013, DTLZ, MMMOP): the abstract and method description assert strong peak ratios and competitive IGD/IGDx with pronounced gains on multimodal problems, yet the supplied text contains no tables, statistical tests, error bars, or explicit baseline comparisons. Without these, the empirical claims cannot be verified and the contribution of the structure-recovery component versus the chaotic map or basin-wise selection alone remains unclear.
minor comments (2)
- [Title/Abstract] Title refers to 'Mapping the Fitness Landscape' while the abstract and method center on CLDE; ensure the full manuscript maintains consistent framing between title and content.
- [Method] Notation for the adaptive persistence threshold and its decay schedule should be defined explicitly with a single equation or pseudocode block to avoid ambiguity in the online tuning procedure.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback on our manuscript. The comments highlight important aspects regarding validation of the basin recovery mechanism and the presentation of experimental results. We address each major comment below and describe the revisions we intend to make to strengthen the paper.
read point-by-point responses
-
Referee: [Method (decode-value-allocate-refine loop)] Method section (decode–value–allocate–refine loop and persistence-guided basin growing): the claim that the k-NN graph plus persistence-guided merging recovers the true peak–basin organization without systematic over-fragmentation or over-merging is load-bearing for attributing performance gains to structure recovery. No quantitative validation (e.g., basin-count error, boundary fidelity, or recovery rate) is supplied against ground-truth multimodal landscapes whose basins are known analytically or by exhaustive sampling.
Authors: We agree that direct quantitative validation of the persistence-guided basin recovery against analytically known ground-truth structures would strengthen the attribution of performance gains specifically to the structure-mapping component. The current manuscript provides indirect support through superior peak ratios on the CEC2013 suite, whose functions have known numbers of global optima. To address this directly, we will add a dedicated subsection with experiments on low-dimensional synthetic landscapes (e.g., 2D and 3D Rastrigin, Griewank, and custom multimodal functions) where basins can be exhaustively enumerated. We will report basin-count error, boundary fidelity (measured via overlap with ground-truth partitions), and recovery rate. These additions will be placed in the experimental section and will help isolate the contribution of the k-NN plus persistence-guided merging step. revision: yes
-
Referee: [Experiments] Experimental results (CEC2013, DTLZ, MMMOP): the abstract and method description assert strong peak ratios and competitive IGD/IGDx with pronounced gains on multimodal problems, yet the supplied text contains no tables, statistical tests, error bars, or explicit baseline comparisons. Without these, the empirical claims cannot be verified and the contribution of the structure-recovery component versus the chaotic map or basin-wise selection alone remains unclear.
Authors: We apologize that the version supplied to the referee appears to have omitted the full experimental tables and statistical details. The complete manuscript contains tables reporting peak ratios for CLDE-S versus established multimodal optimizers (including NEA2, RSPSO, and others) across all 20 CEC2013 functions, as well as IGD and IGDx results for CLDE-M on DTLZ and MMMOP suites, with explicit baseline comparisons. Statistical significance is evaluated via the Wilcoxon rank-sum test (p-values reported), and figures display error bars over 30 independent runs. To further clarify the contribution of the structure-recovery component, we will add an ablation study comparing full CLDE against variants that disable the persistence-guided merging or the adaptive threshold. All tables, statistical results, and ablation analyses will be prominently included and cross-referenced in the revised manuscript. revision: yes
Circularity Check
No circularity: algorithmic description is self-contained with no equations or self-referential derivations
full rationale
The paper describes a procedural framework (decode-value-allocate-refine loop using k-NN graph and persistence-guided basin growing with adaptive threshold) but presents no mathematical equations, fitted parameters, or derivation chain that reduces outputs to inputs by construction. Performance metrics (peak ratio on CEC2013, IGD on DTLZ/MMMOP) are reported as empirical results on external benchmarks rather than predictions forced by the method's own parameters. No self-citations appear in the abstract or method summary as load-bearing justifications, and the central claim of structure recovery is presented as an algorithmic choice without uniqueness theorems or ansatzes imported from prior author work. This is a standard non-circular empirical methods paper.
Axiom & Free-Parameter Ledger
free parameters (2)
- k for nearest-neighbor graph
- initial persistence threshold and decay schedule
axioms (1)
- domain assumption Fitness landscapes possess a recoverable peak-basin organization that can be approximated from sampled points via graph connectivity and valley depth.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
persistence-guided basin growing that merges peaks only when they are not separated by deep valleys. An adaptive persistence threshold continuously tunes the decoding resolution online
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
builds a k-nearest-neighbor graph on a decoding canvas and performs persistence-guided basin growing
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Bilal Alatas. 2010. Chaotic harmony search algorithms.Applied mathematics and computation216, 9 (2010), 2687–2699
work page 2010
-
[2]
Riccardo Caponetto, Luigi Fortuna, Stefano Fazzino, and Maria Gabriella Xibilia
-
[3]
IEEE transactions on evolutionary computation7, 3 (2003), 289–304
Chaotic sequences to improve the performance of evolutionary algorithms. IEEE transactions on evolutionary computation7, 3 (2003), 289–304
work page 2003
- [4]
-
[5]
Weicheng Chen, Wenlong Zhang, and Weixuan Tang. 2019. A Novel Differen- tial Evolution for Multimodal Optimization.IEEE Transactions on Evolutionary Computation(2019)
work page 2019
-
[6]
Ran Cheng, Yaochu Jin, Markus Olhofer, and Bernhard Sendhoff. 2016. A reference vector guided evolutionary algorithm for many-objective optimization.IEEE Transactions on Evolutionary Computation20, 5 (2016), 773–791
work page 2016
-
[7]
Tinkle Chugh, Yaochu Jin, Kaisa Miettinen, Jussi Hakanen, and Karthik Sindhya
-
[8]
A surrogate-assisted reference vector guided evolutionary algorithm for computationally expensive many-objective optimization.IEEE Transactions on Evolutionary Computation22, 1 (2016), 129–142
work page 2016
-
[9]
Carlos A. Coello Coello. 2007. Evolutionary Multi-objective Optimization: A Historical View of the Field.IEEE Computational Intelligence Magazine1, 1 (2007), 28–36
work page 2007
- [10]
-
[11]
Kalyanmoy Deb and Amit Saha. 2010. Multimodal Optimization Using a Bi- objective Evolutionary Algorithm.Evolutionary Computation18, 3 (2010), 373– 395
work page 2010
-
[12]
2010.Computational Topology: An Intro- duction
Herbert Edelsbrunner and John Harer. 2010.Computational Topology: An Intro- duction. American Mathematical Society
work page 2010
-
[13]
Jonathan E Fieldsend. 2014. Running up those hills: Multi-modal search with the niching migratory multi-swarm optimiser. In2014 IEEE Congress on Evolutionary Computation (CEC). IEEE, 2593–2600
work page 2014
-
[14]
David E. Goldberg and Jon Richardson. 1987. Genetic Algorithms with Sharing for Multimodal Function Optimization. InProceedings of the 2nd International Conference on Genetic Algorithms. 41–49
work page 1987
-
[15]
Wenhua Li, Xingyi Yao, Kaiwen Li, Rui Wang, Tao Zhang, and Ling Wang. 2023. Coevolutionary Framework for Generalized Multimodal Multi-Objective Opti- mization.IEEE/CAA Journal of Automatica Sinica10, 7 (2023), 1544–1556
work page 2023
-
[16]
Wenhua Li, Xingyi Yao, Tao Zhang, Rui Wang, and Ling Wang. 2022. Hierarchy Ranking Method for Multimodal Multiobjective Optimization with Local Pareto Fronts.IEEE Transactions on Evolutionary Computation26, 1 (2022), 98–110
work page 2022
-
[17]
Wenhua Li, Tao Zhang, Rui Wang, and Hisao Ishibuchi. 2021. Weighted Indicator- Based Evolutionary Algorithm for Multimodal Multiobjective Optimization.IEEE Transactions on Evolutionary Computation25, 6 (2021), 1064–1078
work page 2021
-
[18]
Xiaodong Li. 2002. A Speciation-Based Genetic Algorithm for Multimodal Func- tion Optimization. InProceedings of the 2002 IEEE Congress on Evolutionary Computation (CEC). 1457–1462
work page 2002
-
[19]
Xiaodong Li, Anthony Engelbrecht, and Mengjie Zhang. 2011. Evolutionary Multimodal Optimization: A Short Survey.IEEE Congress on Evolutionary Com- putation Tutorial Notes(2011)
work page 2011
-
[20]
Jing Liang, Qianqian Guo, Caitong Yue, Boyang Qu, and Kunjie Yu. 2018. A self- organizing multi-objective particle swarm optimization algorithm for multimodal multi-objective problems. InAdvances in Swarm Intelligence: 9th International Conference, ICSI 2018, Shanghai, China, June 17-22, 2018, Proceedings, Part I 9. Springer, 550–560
work page 2018
-
[21]
Jing J Liang, CT Yue, and Bo-Yang Qu. 2016. Multimodal multi-objective opti- mization: A preliminary study. In2016 IEEE congress on evolutionary computation (CEC). Ieee, 2454–2461. doi:10.1109/CEC.2016.7744093
-
[22]
Qiuzhen Lin, Xunfeng Wu, Lijia Ma, Jianqiang Li, Maoguo Gong, and Carlos A Coello Coello. 2021. An ensemble surrogate-based framework for expensive multiobjective evolutionary optimization.IEEE Transactions on Evolutionary Computation26, 4 (2021), 631–645
work page 2021
-
[23]
1995.Niching methods for genetic algorithms
Samir W Mahfoud. 1995.Niching methods for genetic algorithms. University of Illinois at Urbana-Champaign
work page 1995
-
[24]
Fei Ming, Wenyin Gong, and Yaochu Jin. 2024. Growing neural gas network-based surrogate-assisted pareto set learning for multimodal multi-objective optimiza- tion.Swarm and Evolutionary Computation87 (2024), 101541
work page 2024
-
[25]
Fei Ming, Wenyin Gong, Ling Wang, and Liang Gao. 2023. Balancing Convergence and Diversity in Objective and Decision Spaces for Multimodal Multi-Objective Optimization.IEEE Transactions on Emerging Topics in Computational Intelligence 7, 2 (2023), 474–486
work page 2023
-
[26]
Gabriela Ochoa and Nadarajen Veerapen. 2018. Mapping the global structure of TSP fitness landscapes.Journal of Heuristics24, 3 (2018), 265–294. doi:10.1007/ s10732-017-9334-0
work page 2018
-
[27]
Linqiang Pan, Cheng He, Ye Tian, Handing Wang, Xingyi Zhang, and Yaochu Jin
-
[28]
A classification-based surrogate-assisted evolutionary algorithm for expen- sive many-objective optimization.IEEE Transactions on Evolutionary Computation 23, 1 (2018), 74–88
work page 2018
-
[29]
Yan Pei. 2014. Chaotic evolution: fusion of chaotic ergodicity and evolutionary iteration for optimization.Natural Computing13 (2014), 79–96
work page 2014
-
[30]
Bo Peng, Bo Liu, Fu-Yi Zhang, and Ling Wang. 2009. Differential evolution algorithm-based parameter estimation for chaotic systems.Chaos, Solitons & Fractals39, 5 (2009), 2110–2118
work page 2009
-
[31]
André Petrowski. 1996. A Clearing Procedure as a Niching Method for Ge- netic Algorithms. InProceedings of IEEE International Conference on Evolutionary Computation. 798–803
work page 1996
-
[32]
Markus Pitzer and Martin Affenzeller. 2012. A Comprehensive Survey on Fitness Landscape Analysis.Swarm and Evolutionary Computation(2012)
work page 2012
-
[33]
Mike Preuss. 2012. Improved topological niching for real-valued global optimiza- tion. InEuropean Conference on the Applications of Evolutionary Computation. Springer, 386–395
work page 2012
-
[34]
Boyang Qu and P. N. Suganthan. 2012. Differential Evolution with Neighbor- hood Mutation for Multimodal Optimization.IEEE Transactions on Evolutionary Computation16, 5 (2012), 601–614
work page 2012
-
[35]
Takumi Sonoda and Masaya Nakata. 2022. Multiple classifiers-assisted evolu- tionary algorithm based on decomposition for high-dimensional multiobjective problems.IEEE Transactions on Evolutionary Computation26, 6 (2022), 1581–1595
work page 2022
-
[36]
Catalina Stoean, Remus Stoean, and Mihai Preuss. 2010. Topological Species Conservation for Global Optimization.Soft Computing14, 6 (2010), 599–618
work page 2010
-
[37]
Zhiping Tan, Kangshun Li, and Yi Wang. 2021. Differential evolution with adaptive mutation strategy based on fitness landscape analysis.Information Sciences549 (2021), 142–163
work page 2021
-
[38]
Rene Thomsen. 2004. Multimodal optimization using crowding-based differential evolution. InProceedings of the 2004 Congress on Evolutionary Computation (CEC). 1382–1389
work page 2004
-
[39]
Ye Tian, Ran Cheng, Xingyi Zhang, and Yaochu Jin. 2017. PlatEMO: A MATLAB platform for evolutionary multi-objective optimization.IEEE Computational Intelligence Magazine12, 4 (2017), 73–87
work page 2017
-
[40]
Xi Wang, Mengmeng Sheng, Kangfei Ye, Jian Lin, Jiafa Mao, Shengyong Chen, and Weiguo Sheng. 2019. A multilevel sampling strategy based memetic differential evolution for multimodal optimization.Neurocomputing334 (2019), 79–88
work page 2019
-
[41]
Zi-Jia Wang, Zhi-Hui Zhan, Ying Lin, Wei-Jie Yu, Hua Wang, Sam Kwong, and Jun Zhang. 2019. Automatic niching differential evolution with contour pre- diction approach for multimodal optimization problems.IEEE Transactions on Evolutionary Computation24, 1 (2019), 114–128
work page 2019
-
[42]
Zi-Jia Wang, Zhi-Hui Zhan, Jun Zhang, and Qingfu Zhang. 2018. Dual-Strategy Differential Evolution with Affinity Propagation Clustering for Multimodal Opti- mization Problems.IEEE Transactions on Evolutionary Computation22, 6 (2018), 894–908
work page 2018
-
[43]
Caitong Yue, Boyang Qu, and Jing Liang. 2018. A Multiobjective Particle Swarm Optimizer Using Ring Topology for Solving Multimodal Multiobjective Problems. IEEE Transactions on Evolutionary Computation22, 5 (2018), 805–817
work page 2018
-
[44]
Ivan Zelinka, Sergej Celikovsk `y, Hendrik Richter, and Guanrong Chen. 2010. Evolutionary algorithms and chaotic systems. Vol. 267. Springer
work page 2010
-
[45]
Jinyuan Zhang, Aimin Zhou, and Guixu Zhang. 2015. A classification and Pareto domination based multiobjective evolutionary algorithm. In2015 IEEE congress on evolutionary computation (CEC). IEEE, 2883–2890
work page 2015
-
[46]
Qingfu Zhang and Hui Li. 2007. MOEA/D: A Multiobjective Evolutionary Algo- rithm Based on Decomposition.IEEE Transactions on Evolutionary Computation 11, 6 (2007), 712–731
work page 2007
-
[47]
Eckart Zitzler, Marco Laumanns, and Lothar Thiele. 2001. SPEA2: Improving the strength Pareto evolutionary algorithm.TIK report103 (2001)
work page 2001
-
[48]
Feng Zou, Debao Chen, Hui Liu, Siyu Cao, Xuying Ji, and Yan Zhang. 2022. A survey of fitness landscape analysis for optimization.Neurocomputing503 (2022), 129–139. Conference’17, July 2017, Washington, DC, USA Meng Xiang and Pei Yan Supplementary materials 6 Single-Objective Multimodal Optimization 6.1 Benchmark Definitions Single-objective multimodal ben...
work page 2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.