Unlocking the Potential of Continual Model Merging: An ODE Perspective
Pith reviewed 2026-05-21 08:28 UTC · model grok-4.3
The pith
Continual model merging follows time-dependent ODE paths in parameter space to avoid forgetting.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
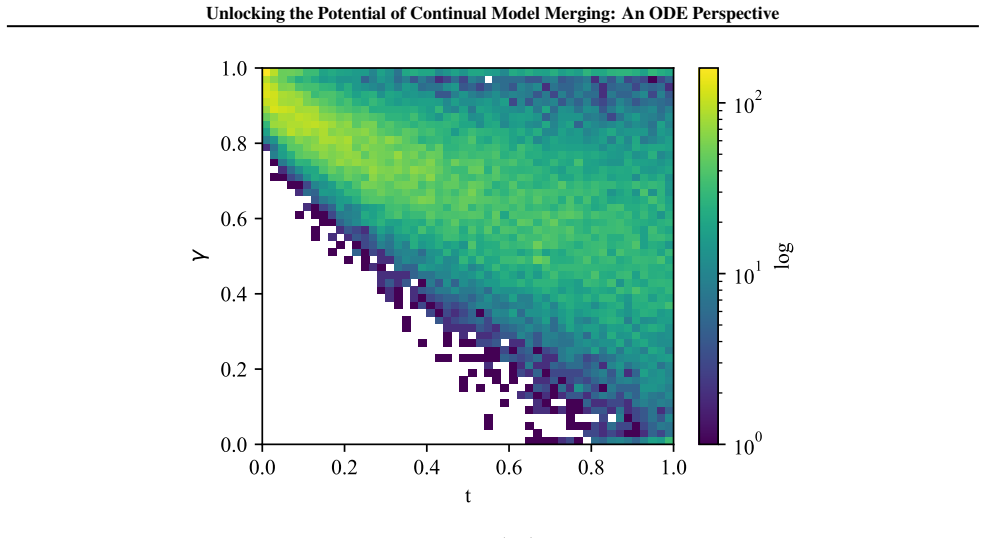
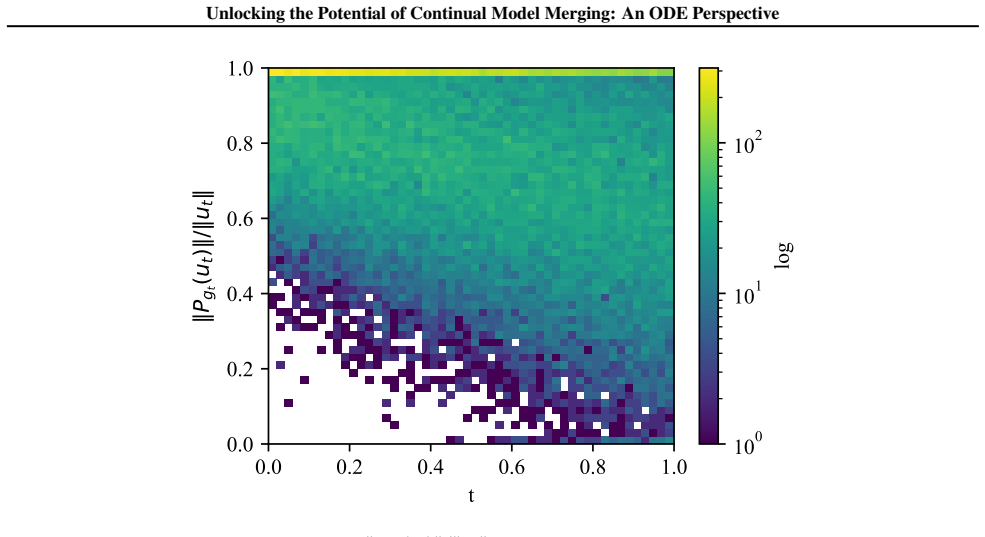
The central claim is that continual model merging should follow low-loss connecting paths in parameter space without crossing loss barriers. ODE-M achieves this by integrating a time-dependent velocity field to trace the path and enforcing barrier constraints to prevent loss-increasing steps, resulting in state-of-the-art performance across mainstream CMM benchmarks compared to competitors.
What carries the argument
ODE-driven Merging (ODE-M), which traces low-loss paths using a time-dependent velocity field with barrier constraints.
If this is right
- Merging allocates capacity more consistently between old and new capabilities.
- Forgetting is reduced in sequences with heterogeneous task importance.
- Merged models maintain performance better over many sequential tasks.
- Provides a controllable alternative to repeated retraining for foundation model customization.
Where Pith is reading between the lines
- The ODE perspective could link merging to continuous optimization dynamics in training.
- It might apply to merging in other domains like reinforcement learning policies.
- Scaling the method to very large models could test if low-loss paths remain accessible.
Load-bearing premise
Desirable merged models lie on low-loss connecting paths in parameter space, and continual merging must follow these paths without crossing loss barriers.
What would settle it
Running the ODE-M path on a benchmark and observing whether the loss increases at any step or if final performance matches or exceeds baselines without the constraints.
Figures






read the original abstract
Continual Model Merging (CMM) enables rapid customization of foundation models by sequentially incorporating task-adapted models without repeated retraining. However, existing merging rules usually update the deployed model through fixed algebraic or projection-based operations, providing limited control over how much previously accumulated knowledge should be retained relative to the incoming task model. This limitation leads to unstable retention and performance degradation in long task streams, and becomes more pronounced when tasks have heterogeneous utilities. We propose ODE-driven Merging (ODE-M), a controllable framework that formulates each continual merge as a trajectory in parameter space rather than a one-step endpoint update. Motivated by mode connectivity, ODE-M constructs a barrier-aware trajectory using a rectified time-dependent velocity field, where lightweight first-order feedback from a small calibration set suppresses loss-increasing motion while preserving progress toward the incoming model. The next merged model is then obtained by selecting an operating point along this trajectory through a utility-aware time schedule, providing an explicit mechanism for balancing retained historical knowledge and incoming task expertise. Extensive experiments on standard CMM benchmarks show that ODE-M consistently improves over strong continual merging baselines across CLIP ViT backbones, stream lengths, and heterogeneous task-utility settings.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces ODE-M for Continual Model Merging (CMM). Motivated by mode connectivity, it assumes desirable merged models lie on low-loss connecting paths in parameter space. The method constructs a transition by integrating a time-dependent velocity field v(t, θ) while enforcing barrier constraints that reject loss-increasing steps at each integration step. This is claimed to provide explicit controllability over capacity allocation, reduce forgetting relative to fixed algebraic merging rules, and achieve state-of-the-art performance on mainstream CMM benchmarks.
Significance. If the central construction and empirical claims hold, the work supplies a dynamical-systems framing for CMM that moves beyond static linear combinations, potentially enabling more consistent performance allocation across heterogeneous tasks. The explicit use of an ODE trajectory with local barrier enforcement is a concrete technical contribution that could be extended to other continual-learning settings.
major comments (2)
- [Method section (velocity field and barrier term)] The barrier constraint is described as a local, per-step rejection of loss-increasing moves during integration of the time-dependent velocity field. No global certificate (e.g., Lyapunov function, a-posteriori loss audit along the full trajectory, or invariance argument) is supplied showing that the final parameter vector after T sequential merges remains on a connecting path whose loss is no higher than the individual task minima. This local-to-global extrapolation is load-bearing for the claim that ODE-M “prevents loss-increasing steps” and thereby reduces forgetting.
- [Experiments / Abstract] The abstract asserts SOTA results across mainstream CMM benchmarks, yet the manuscript supplies no quantitative tables, error bars, dataset sizes, task sequences, or implementation details for the velocity field and constraint enforcement. Without these, the performance claim cannot be verified and the comparison to prior algebraic merging methods remains ungrounded.
minor comments (2)
- [§3] Clarify the precise functional form of the time-dependent velocity field v(t, θ) and the exact mathematical statement of the barrier constraint (e.g., whether it is a hard rejection or a soft penalty term).
- [Implementation details] Add a short discussion of how the integration step size and discretization scheme affect the fidelity of the path-following argument.
Simulated Author's Rebuttal
We are grateful to the referee for the constructive feedback on our manuscript. We address the major comments point by point below, clarifying our approach and committing to revisions where appropriate to enhance the clarity and rigor of the work.
read point-by-point responses
-
Referee: [Method section (velocity field and barrier term)] The barrier constraint is described as a local, per-step rejection of loss-increasing moves during integration of the time-dependent velocity field. No global certificate (e.g., Lyapunov function, a-posteriori loss audit along the full trajectory, or invariance argument) is supplied showing that the final parameter vector after T sequential merges remains on a connecting path whose loss is no higher than the individual task minima. This local-to-global extrapolation is load-bearing for the claim that ODE-M “prevents loss-increasing steps” and thereby reduces forgetting.
Authors: We thank the referee for highlighting this important aspect of our theoretical grounding. The barrier constraint is indeed enforced locally at each integration step to reject loss-increasing moves, which is intended to keep the trajectory on low-loss paths incrementally. We acknowledge that a formal global certificate, such as a Lyapunov function or invariance argument, is not provided in the current manuscript. To address the concern, we will add an a-posteriori loss audit along sampled trajectories in the revised version to empirically demonstrate that the final parameter vectors do not incur higher loss than the individual task minima. We will also expand the discussion to clarify the rationale behind local enforcement and its relation to the ODE perspective. revision: yes
-
Referee: [Experiments / Abstract] The abstract asserts SOTA results across mainstream CMM benchmarks, yet the manuscript supplies no quantitative tables, error bars, dataset sizes, task sequences, or implementation details for the velocity field and constraint enforcement. Without these, the performance claim cannot be verified and the comparison to prior algebraic merging methods remains ungrounded.
Authors: We agree with the referee that the experimental validation requires more explicit presentation to support the SOTA claims. The current manuscript's experiments section will be augmented in the revision with detailed quantitative tables, including performance metrics with error bars from multiple runs, specifications of dataset sizes, task sequences used in the continual merging benchmarks, and implementation details regarding the time-dependent velocity field and the barrier constraint enforcement mechanism. This will ground the comparisons to prior algebraic merging methods and allow for independent verification. revision: yes
Circularity Check
No significant circularity; derivation introduces independent ODE construction
full rationale
The paper motivates its proposal by citing the established mode-connectivity literature and stating an assumption that desirable merged models lie on low-loss paths. It then defines ODE-M as a distinct technical construction that integrates a time-dependent velocity field subject to local barrier constraints. No quoted equation or step reduces the claimed path-tracing behavior to the input assumption by definition, renames a fitted quantity as a prediction, or relies on a self-citation chain for uniqueness. The central derivation therefore remains self-contained and does not collapse to its motivating premise.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Desirable merged models lie on low loss connecting paths and continual merging should follow such paths without crossing loss barriers that induce forgetting
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.