Trajectory Planning and Control near the Limits: an Open Experimental Benchmark on the RoboRacer Platform
Pith reviewed 2026-05-20 05:14 UTC · model grok-4.3
The pith
A modular benchmark shows that a model-structured neural network improves steering control accuracy and reduces oscillations in high-acceleration autonomous driving tests.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that integrating a model-structured neural network for inverse dynamics steering control with geometric path tracking and online time-optimal velocity replanning leads to significantly improved tracking accuracy, reduced steering oscillations, physical interpretability, and the ability to safely operate at higher speeds and accelerations, as validated through ablations on the RoboRacer platform using cautious and aggressive racelines.
What carries the argument
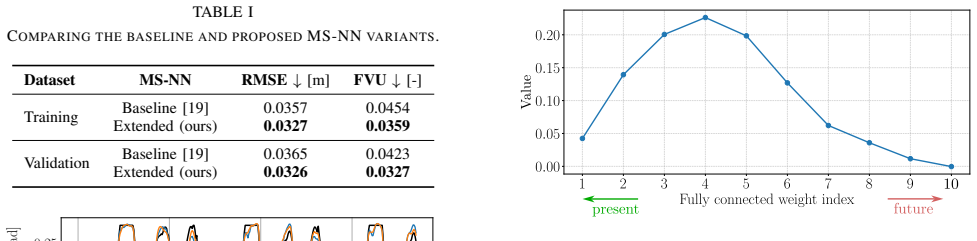
The model-structured neural network (MS-NN), which embeds physical model structure into a neural network to learn the inverse dynamics mapping from desired states to steering commands.
If this is right
- MS-NN controllers can be combined with standard geometric trackers to achieve better performance than either alone.
- Online velocity replanning compensates for tracking errors and allows higher peak speeds without instability.
- The modular setup enables systematic ablation studies to isolate the contribution of each component.
- Public release of code, data, and videos supports replication and extension by other researchers.
Where Pith is reading between the lines
- If the 1:10 scale results scale, full-size vehicles could adopt similar hybrid model-neural controllers for extreme maneuvers.
- Extending the benchmark to include sensor noise or changing conditions would test robustness beyond the current circuits.
- The interpretability of the MS-NN might allow hybrid physics-informed designs that generalize better than black-box networks.
- Future work could compare this approach against model predictive control or other learning methods in the same framework.
Load-bearing premise
The dynamics observed on the 1:10-scale RoboRacer platform with the two test circuits are representative enough that the performance gains will translate to full-scale vehicles and more varied environments.
What would settle it
Running the same controllers on a full-scale car on a different track and finding that the MS-NN no longer improves accuracy or that replanning does not increase safe top speeds would falsify the claims.
Figures









read the original abstract
We present a modular framework to benchmark new and existing methods for trajectory planning and control in high-acceleration maneuvers that push autonomous driving to the limits. Our framework includes time-optimal raceline generation, online time-optimal velocity replanning, geometric path tracking controllers, and a new model-structured neural network (MS-NN) to learn the inverse dynamics for steering control. We deploy our framework on a 1:10-scale RoboRacer platform, using two circuits. Through several ablations with cautious and aggressive racelines, we study the performance of single modules and their combinations. We show that our MS-NN significantly improves tracking accuracy, decreases steering oscillations, and is physically interpretable. Moreover, online velocity replanning improves lap times by compensating for execution errors, and enables the vehicle to safely reach higher speeds and accelerations. To support future research, our code, datasets, videos and results are publicly available at https://roboracer-benchmark.github.io/planning_control_benchmark/.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a modular open-source framework for benchmarking trajectory planning and control methods in high-acceleration maneuvers on a 1:10-scale RoboRacer platform across two circuits. Key components include time-optimal raceline generation, online time-optimal velocity replanning, geometric path tracking controllers, and a model-structured neural network (MS-NN) for learning inverse dynamics in steering. Ablation studies compare cautious and aggressive racelines, claiming that the MS-NN significantly improves tracking accuracy, reduces steering oscillations, and is physically interpretable, while online velocity replanning improves lap times and enables higher speeds and accelerations. Code, datasets, videos, and results are released publicly.
Significance. If the performance claims are substantiated with proper statistical reporting, this work offers a useful public benchmark and modular testbed for extreme-condition autonomous driving research. The open release of implementation details, data, and results is a clear strength that supports reproducibility and future extensions. The focus on physical hardware experiments rather than purely simulated or parameter-fitted results adds practical value, though the 1:10-scale platform's representativeness for full-scale vehicles remains an open question not central to the paper's scope.
major comments (2)
- [Abstract and ablation study section] Abstract and ablation study section: the claims that the MS-NN 'significantly improves tracking accuracy' and 'decreases steering oscillations' (and that velocity replanning 'improves lap times') are not accompanied by reported variances, standard deviations, number of independent trials, error bars on metrics such as lateral error or lap time, or any statistical tests. Without these, it is not possible to assess whether observed differences exceed experimental noise or arise from unmodeled disturbances, initial conditions, or tuning.
- [Section describing the MS-NN] Section describing the MS-NN: the assertion that the network 'is physically interpretable' is stated but not supported by quantitative verification. No comparison of learned parameters against known physical coefficients, sensitivity analysis, or visualization demonstrating interpretability beyond the architectural choice is provided, weakening the interpretability claim relative to the performance claims.
minor comments (1)
- [Results figures] Figure captions and axis labels in the results section could more explicitly state the number of runs or conditions represented to aid quick interpretation of the ablation plots.
Simulated Author's Rebuttal
Thank you for the constructive feedback on our manuscript. We appreciate the focus on strengthening the statistical reporting of our experimental claims and providing more concrete support for the interpretability of the MS-NN. We will revise the paper accordingly to address these points while preserving the core contributions of the open benchmark.
read point-by-point responses
-
Referee: [Abstract and ablation study section] Abstract and ablation study section: the claims that the MS-NN 'significantly improves tracking accuracy' and 'decreases steering oscillations' (and that velocity replanning 'improves lap times') are not accompanied by reported variances, standard deviations, number of independent trials, error bars on metrics such as lateral error or lap time, or any statistical tests. Without these, it is not possible to assess whether observed differences exceed experimental noise or arise from unmodeled disturbances, initial conditions, or tuning.
Authors: We agree that the current manuscript would benefit from more explicit statistical reporting to substantiate the performance claims. Our hardware experiments on the RoboRacer platform included multiple independent trials per configuration (typically five runs) to account for variability from disturbances and initial conditions. In the revised version, we will update the ablation study section to report mean values accompanied by standard deviations for key metrics such as lateral error and lap time, add error bars to the relevant figures, and explicitly state the number of trials performed. This will enable readers to evaluate whether the observed improvements in tracking accuracy, reduced oscillations, and lap times are consistent across runs. revision: yes
-
Referee: [Section describing the MS-NN] Section describing the MS-NN: the assertion that the network 'is physically interpretable' is stated but not supported by quantitative verification. No comparison of learned parameters against known physical coefficients, sensitivity analysis, or visualization demonstrating interpretability beyond the architectural choice is provided, weakening the interpretability claim relative to the performance claims.
Authors: The physical interpretability claim arises from the model-structured design of the MS-NN, which incorporates the known structure of the steering inverse dynamics (including terms for friction and inertia) so that learned parameters map directly to physically meaningful coefficients. We acknowledge that the initial submission did not include quantitative verification such as parameter comparisons or sensitivity analysis. In the revision, we will add a dedicated paragraph and accompanying visualization in the MS-NN section that compares the learned parameters against expected physical ranges derived from the RoboRacer vehicle model and includes a brief sensitivity study demonstrating how changes in specific weights affect predicted steering behavior. revision: yes
Circularity Check
No significant circularity; claims rest on hardware experiments
full rationale
The paper presents an experimental benchmark framework evaluated on physical 1:10-scale RoboRacer hardware across two circuits and multiple ablations. All performance claims (MS-NN tracking improvements, velocity replanning lap-time gains) are reported as measured outcomes from real-vehicle tests rather than mathematical derivations, predictions, or first-principles results. No equations, fitted parameters, or self-citations are shown to reduce the central results to their own inputs by construction; the work is self-contained against external benchmarks via open code, datasets, and videos.
Axiom & Free-Parameter Ledger
free parameters (1)
- MS-NN training hyperparameters and weights
axioms (1)
- domain assumption The vehicle dynamics model used to structure the neural network is sufficiently accurate for control purposes
invented entities (1)
-
Model-structured neural network (MS-NN)
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Autonomous vehicles on the edge: A survey on autonomous vehicle racing,
J. Betz, H. Zheng, A. Liniger, U. Rosolia, P. Karle, M. Behl, V . Krovi, and R. Mangharam, “Autonomous vehicles on the edge: A survey on autonomous vehicle racing,”IEEE Open Journal of Intelligent Transportation Systems, vol. 3, pp. 458–488, 2022
work page 2022
-
[2]
Outracing champion gran turismo drivers with deep reinforcement learning,
P. Wurman, S. Barrett, K. Kawamoto, J. MacGlashan, K. Subramanian, T. Walsh, R. Capobianco, A. Devlic, F. Eckert, F. Fuchs, L. Gilpin, P. Khandelwal, V . Kompella, H. Lin, P. MacAlpine, D. Oller, T. Seno, C. Sherstan, M. Thomure, and H. Kitano, “Outracing champion gran turismo drivers with deep reinforcement learning,”Nature, vol. 602, pp. 223–228, 02 2022
work page 2022
-
[3]
Online time-optimal trajectory planning on three-dimensional race tracks,
M. Rowold, L. ¨Ogretmen, U. Kasolowsky, and B. Lohmann, “Online time-optimal trajectory planning on three-dimensional race tracks,” in 2023 IEEE Intelligent V ehicles Symposium (IV), 2023, pp. 1–8
work page 2023
-
[4]
M. Piccinini, S. Taddei, J. Betz, and F. Biral, “Kineto-dynamical planning and accurate execution of minimum-time maneuvers on three-dimensional circuits,” in2025 IEEE International Conference on Robotics and Automation (ICRA), 2025, pp. 1–7
work page 2025
-
[5]
Impacts of model fidelity on trajectory optimization for autonomous vehicles in extreme maneuvers,
C. Subosits, J. Gerdes, “Impacts of model fidelity on trajectory optimization for autonomous vehicles in extreme maneuvers,”IEEE Transactions on Intelligent V ehicles, vol. 6, no. 3, pp. 546–558, 2021
work page 2021
-
[6]
F. Christ, A. Wischnewski, A. Heilmeier, and B. Lohmann, “Time- optimal trajectory planning for a race car considering variable tyre- road friction coefficients,”V ehicle System Dynamics, vol. 59, no. 4, pp. 588–612, 2021
work page 2021
-
[7]
How optimal is the minimum-time manoeuvre of an artificial race driver?
M. Piccinini, S. Taddei, E. Pagot, E. Bertolazzi, and F. Biral, “How optimal is the minimum-time manoeuvre of an artificial race driver?” V ehicle System Dynamics, vol. 63, no. 12, pp. 2213–2240, 2025
work page 2025
-
[8]
Minimum curvature trajectory planning and control for an autonomous race car,
A. Heilmeier, A. Wischnewski, L. Hermansdorfer, J. Betz, M. Lienkamp, and B. Lohmann, “Minimum curvature trajectory planning and control for an autonomous race car,”V ehicle System Dynamics, vol. 58, no. 10, pp. 1497–1527, 2020
work page 2020
-
[9]
Lateral control for autonomous wheeled vehicles: A technical review,
Y . Kebbati, N. Ait-Oufroukh, D. Ichalal, and V . Vigneron, “Lateral control for autonomous wheeled vehicles: A technical review,”Asian Journal of Control, vol. 25, no. 4, pp. 2539–2563, 2023
work page 2023
-
[10]
Implementation of the pure pursuit path tracking algorithm,
R. C. Coulter, “Implementation of the pure pursuit path tracking algorithm,” Carnegie Mellon University, Technical Report, 1992. [Online]. Available: https://www.ri.cmu.edu/pub files/pub4/coulter r craig 1992 1/coulter r craig 1992 1.pdf
work page 1992
-
[11]
A path-tracking algorithm using predictive stanley lateral controller,
A. AbdElmoniem, A. Osama, M. Abdelaziz, and S. A. Maged, “A path-tracking algorithm using predictive stanley lateral controller,” International Journal of Advanced Robotic Systems, vol. 17, no. 6, p. 1729881420974852, 2020
work page 2020
-
[12]
Optimization-based hierarchical motion planning for au- tonomous racing,
J. L. V ´azquez, M. Br ¨uhlmeier, A. Liniger, A. Rupenyan, and J. Lygeros, “Optimization-based hierarchical motion planning for au- tonomous racing,” in2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020, pp. 2397–2403
work page 2020
-
[13]
F. Jahncke, B. Zarrouki, M. Piccinini, J. D’sa, D. Isele, S. Bae, and J. Betz, “Differentiable weights-varying nonlinear mpc via gradient- based policy learning: An autonomous vehicle guidance example,” IEEE Robotics and Automation Letters, vol. 11, no. 3, pp. 3724–3731, 2026
work page 2026
-
[14]
Rlpp: A residual method for zero-shot real-world autonomous racing on scaled platforms,
E. Ghignone, N. Baumann, C. Hu, J. Wang, L. Xie, A. Carron, and M. Magno, “Rlpp: A residual method for zero-shot real-world autonomous racing on scaled platforms,” in2025 IEEE International Conference on Robotics and Automation (ICRA), 2025, pp. 16 664– 16 670
work page 2025
-
[15]
Learning- based model predictive control for autonomous racing,
J. Kabzan, L. Hewing, A. Liniger, and M. N. Zeilinger, “Learning- based model predictive control for autonomous racing,”IEEE Robotics and Automation Letters, vol. 4, no. 4, pp. 3363–3370, 2019
work page 2019
-
[16]
Coupled longi- tudinal and lateral control of a vehicle using deep learning,
G. Devineau, P. Polack, F. Altch ´e, and F. Moutarde, “Coupled longi- tudinal and lateral control of a vehicle using deep learning,” in2018 IEEE International Conference on Intelligent Transportation Systems (ITSC), 11 2018, pp. 642–649
work page 2018
-
[17]
M. Piccinini, M. Larcher, E. Pagot, D. Piscini, L. Pasquato, and F. Biral, “A predictive neural hierarchical framework for on-line time-optimal motion planning and control of black-box vehicle models,”V ehicle system dynamics, vol. 61, no. 1, pp. 83–110, 2023
work page 2023
-
[18]
Reinforcement learning and optimal control: A hybrid collision avoidance approach,
S. Gottschalk, M. Gerdts, and M. Piccinini, “Reinforcement learning and optimal control: A hybrid collision avoidance approach,” inPro- ceedings of the 10th International Conference on V ehicle Technology and Intelligent Transport Systems - VEHITS, INSTICC. SciTePress, 2024, pp. 76–87
work page 2024
-
[19]
A mental simulation approach for learning neural-network predictive control (in self-driving cars),
M. D. Lio, R. Don `a, G. P. R. Papini, F. Biral, and H. Svensson, “A mental simulation approach for learning neural-network predictive control (in self-driving cars),”IEEE Access, vol. 8, pp. 192 041– 192 064, 2020
work page 2020
-
[20]
A physics-driven artificial agent for online time-optimal vehicle motion planning and control,
M. Piccinini, S. Taddei, M. Larcher, M. Piazza, and F. Biral, “A physics-driven artificial agent for online time-optimal vehicle motion planning and control,”IEEE Access, vol. 11, pp. 46 344–46 372, 2023
work page 2023
-
[21]
Model-structured neural networks to control the steering dynamics of autonomous race cars,
M. Piccinini, A. Mungiello, G. Jank, G. P. R. Papini, F. Biral, and J. Betz, “Model-structured neural networks to control the steering dynamics of autonomous race cars,” in2025 IEEE 28th International Conference on Intelligent Transportation Systems (ITSC), 2025, pp. 4129–4136
work page 2025
-
[22]
A road friction-aware anti-lock braking system based on model-structured neural networks,
M. Piccinini, M. Zumerle, J. Betz, and G. Pietro Rosati Papini, “A road friction-aware anti-lock braking system based on model-structured neural networks,”IEEE Open Journal of Intelligent Transportation Systems, vol. 6, pp. 522–536, 2025
work page 2025
-
[23]
M. Frego, E. Bertolazzi, F. Biral, D. Fontanelli, and L. Palopoli, “Semi-analytical minimum time solutions with velocity constraints for trajectory following of vehicles,”Automatica, vol. 86, pp. 18–28, 2017
work page 2017
-
[24]
A. Langmann, L. ¨Ogretmen, F. Werner, and J. Betz, “Online velocity profile generation and tracking for sampling-based local planning algo- rithms in autonomous racing environments,” in2025 IEEE Intelligent V ehicles Symposium (IV), 2025, pp. 632–639
work page 2025
-
[25]
M. Piazza, M. Piccinini, S. Taddei, F. Biral, and E. Bertolazzi, “Real-time velocity profile optimization for time-optimal maneuvering with generic acceleration constraints,”IEEE Robotics and Automation Letters, vol. 11, no. 2, pp. 1674–1681, 2026
work page 2026
-
[26]
On the g2 hermite interpolation problem with clothoids,
E. Bertolazzi and M. Frego, “On the g2 hermite interpolation problem with clothoids,”Journal of Computational and Applied Mathematics, vol. 341, pp. 99–116, 2018
work page 2018
-
[27]
Guiggiani,The Science of V ehicle Dynamics: Handling, Braking, and Ride of Road and Race Cars
M. Guiggiani,The Science of V ehicle Dynamics: Handling, Braking, and Ride of Road and Race Cars. Springer, 2018
work page 2018
-
[28]
H. Bozdogan, “Model selection and akaike’s information criterion (aic): The general theory and its analytical extensions,”Psychometrika, vol. 52, no. 3, pp. 345–370, Sep 1987
work page 1987
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.